






永磁同步电机转速PI控制,SMC滑模控制,ADRC自抗扰控制Simulink对比仿真模型
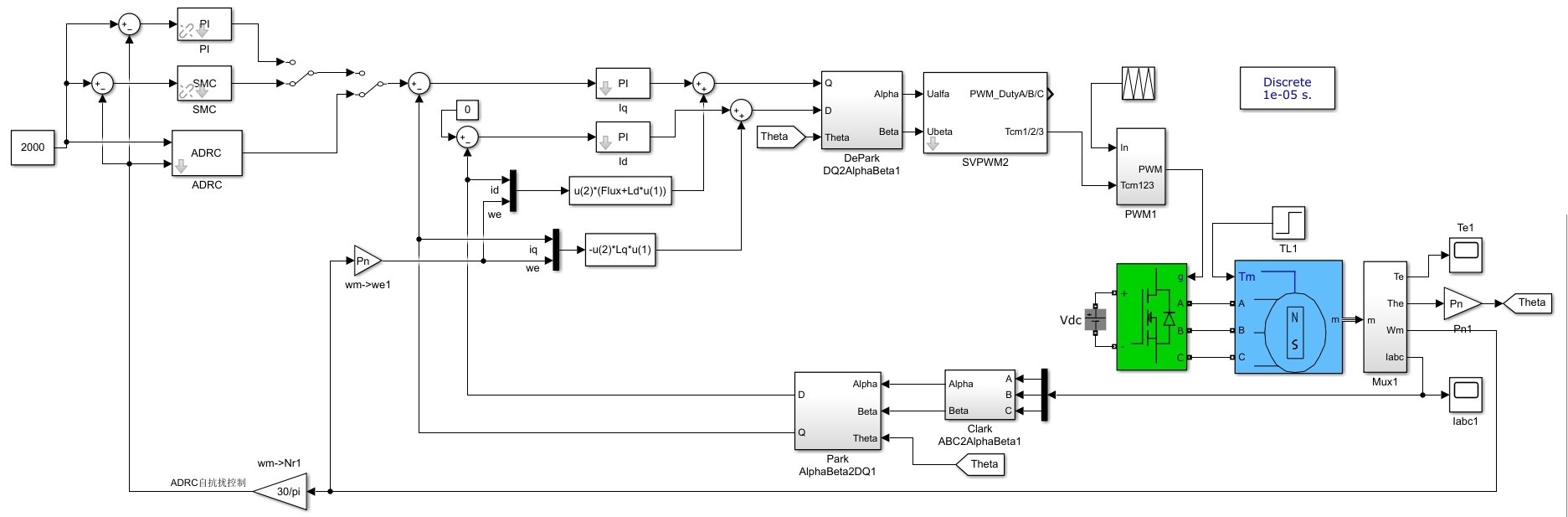
1.永磁同步电机SVPWM控制算法,实现FOC矢量控制,DQ轴解耦控制~
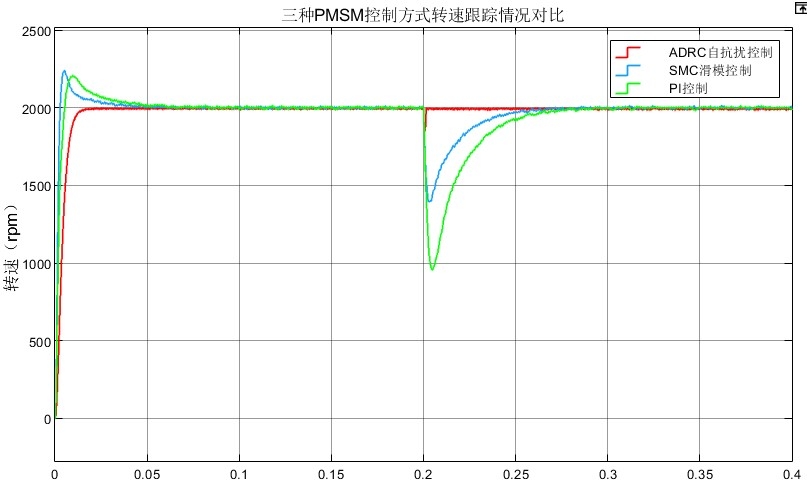
2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI控制、SMC滑模控制和ADRC自抗扰控制,对三种方法进行对比,分析ADRC控制优越性~
YID:14118661001669662
狼堡工作室
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于其高效、高性能、高功率密度等特点,在工业领域得到广泛应用。针对永磁同步电机的转速控制,传统的方法主要包括PI控制、滑模控制和自抗扰控制(Active Disturbance Rejection Control, ADRC)等。
首先,永磁同步电机的SVPWM控制算法是一种常用的控制策略,通过实现矢量控制(Field Oriented Control, FOC),可以实现对电机的精确控制。其中,DQ轴解耦控制是SVPWM控制算法的核心部分。通过对永磁同步电机进行DQ轴变换,将三相电机转换为两个相互独立的轴,从而实现对电机的解耦控制。
其次,对于转速控制,一般采用电流环和速度环双闭环控制。在电流环控制中,采用PI控制器对电流进行调节,使其达到期望值。在速度环控制中,针对转速控制的方法有多种选择,本文将分别对比PI控制、滑模控制和自抗扰控制三种方法。
首先,PI控制是一种经典的控制策略,通过对转速误差进行比例和积分调节,实现对电机的转速控制。其优点是简单易实现,但在工程实践中存在一些问题,如对扰动的鲁棒性较差。
其次,滑模控制是一种非线性控制策略,具有较强的鲁棒性和抗扰动能力。通过引入滑模面和滑模控制律,实现对转速的精确控制。滑模控制策略能够在一定程度上抑制外界扰动对系统的影响,提高控制系统的稳定性。
最后,ADRC控制是一种新颖的控制策略,基于自抗扰原理,通过建立系统模型和引入状态观测器,实现对扰动的估计和补偿。ADRC控制策略具有较强的鲁棒性和适应性,能够有效克服系统参数变化和外界干扰对系统性能的影响。
为了对三种转速控制方法进行对比,本文采用Simulink进行仿真模型搭建与验证。通过对不同控制方法下的转速响应、抗扰性能等指标进行分析,评估各种控制方法的优劣。实验结果表明,ADRC控制策略在转速控制方面具有优越性,能够实现更精确、更鲁棒的转速控制。
综上所述,针对永磁同步电机的转速控制问题,本文围绕永磁同步电机的SVPWM控制算法展开讨论,并对转速电流双闭环控制中的PI控制、滑模控制和ADRC自抗扰控制三种方法进行对比分析。通过Simulink对比仿真模型,验证了ADRC控制策略在转速控制方面的优越性。这些研究成果对于提高永磁同步电机的控制性能和稳定性具有重要意义,为永磁同步电机的应用提供了理论指导和技术支持。
相关的代码,程序地址如下:http://nodep.cn/661001669662.html
















 609
609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









