






四旋翼仿真simulink模型,支持ADRC和pid控制器切换,支持断开位置环的纯姿态角控制模式,非线性建模,精度高。
YID:1350648951841435
宇宙横行
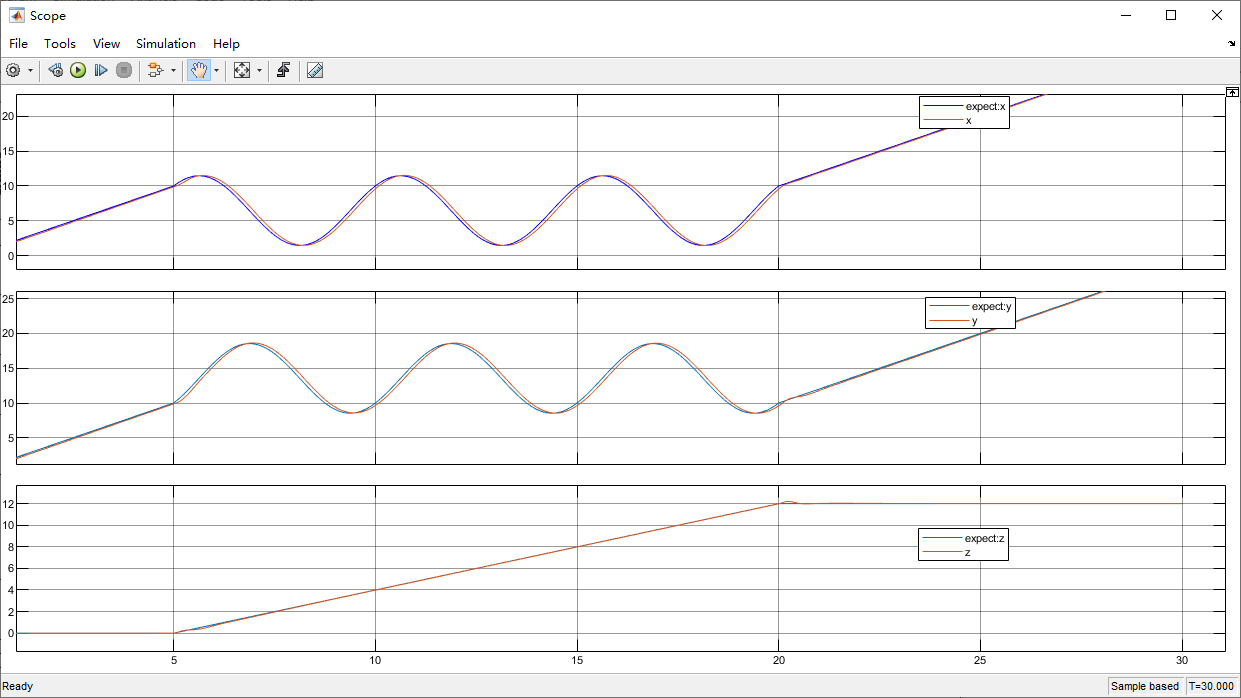
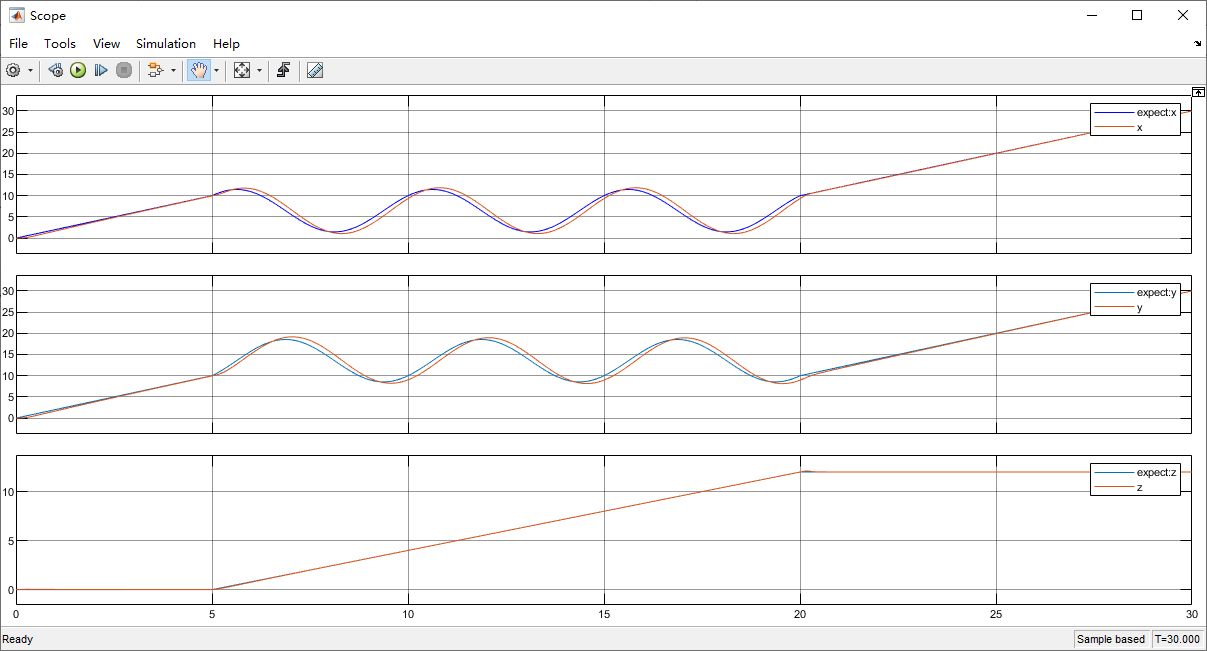


四旋翼仿真simulink模型是一种用于模拟四旋翼飞行行为的技术工具。它可以帮助开发人员和飞行控制系统设计师在开发过程中进行各种飞行实验和性能评估。同时,该模型还支持ADRC(Active Disturbance Rejection Control)和PID(Proportional-Integral-Derivative)控制器的切换,以及断开位置环的纯姿态角控制模式,从而提供了更灵活和精准的控制方式。
在四旋翼无人机领域,精确的建模和控制是关键技术。传统的线性建模方法只能提供近似的控制效果,而非线性建模能够更精确地描述四旋翼飞行的动力学特性和非线性效应。通过使用非线性建模方法,我们能够更好地理解四旋翼的飞行行为,并为控制系统的设计和优化提供更准确的参考。
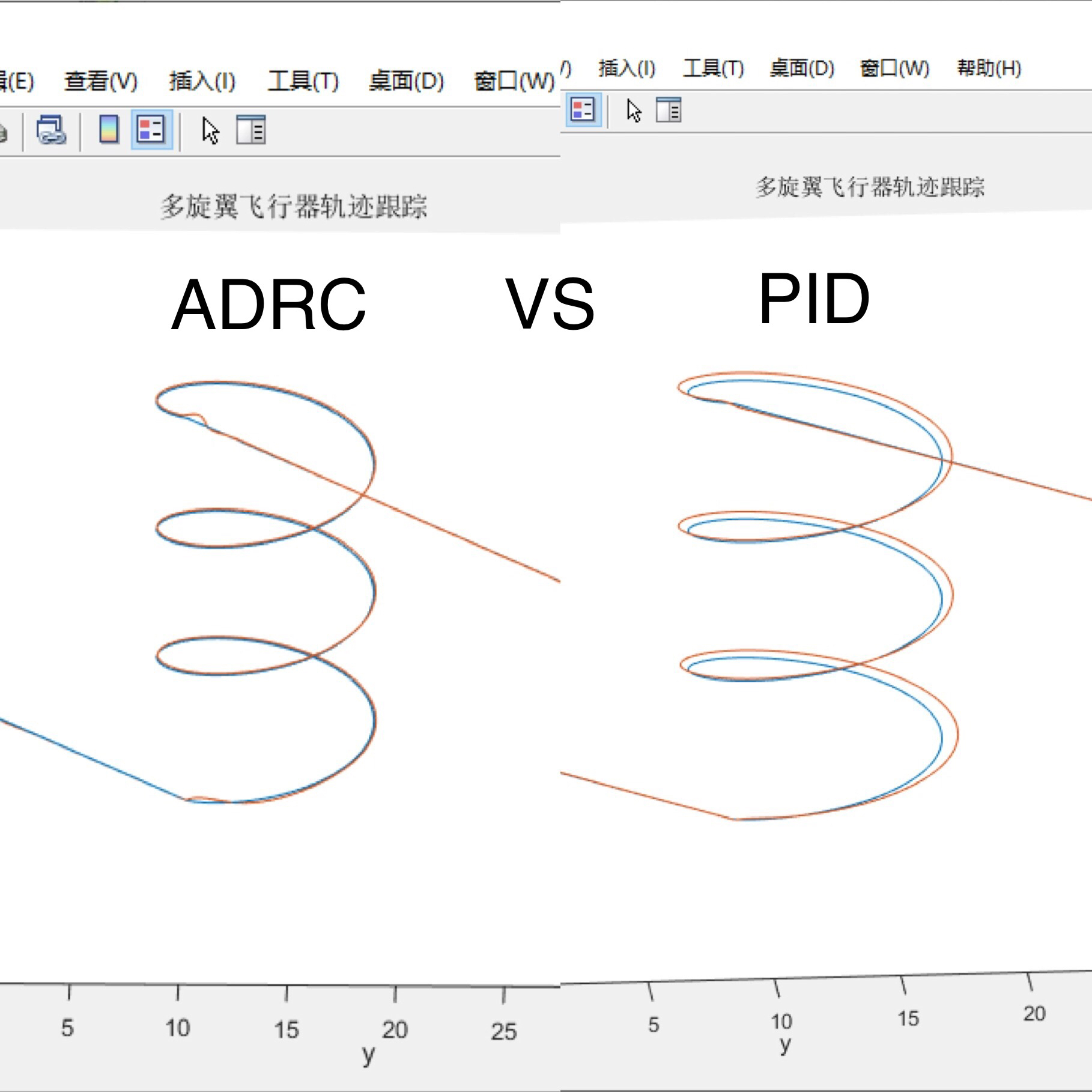
在四旋翼仿真simulink模型中,ADRC和PID控制器的切换是一种常用的控制策略。ADRC控制器采用了一种前馈补偿的方式,可以有效地抑制外部干扰和模型不确定性对系统性能的影响。而PID控制器是一种经典的反馈控制器,通过调节比例、积分和微分增益来实现对系统的稳定性和响应速度的控制。通过在仿真模型中支持ADRC和PID控制器的切换,我们能够根据实际需求选择最适合的控制策略,从而提高四旋翼飞行的控制性能。
在某些应用场景下,我们可能需要断开位置环,仅采用纯姿态角控制模式。位置环控制是指通过控制四旋翼的位置来实现飞行任务,而姿态角控制则是通过直接控制四旋翼的姿态角来实现飞行控制。断开位置环后,我们可以更加专注于姿态角的控制,从而提高飞行的精度和稳定性。通过在仿真模型中支持断开位置环的纯姿态角控制模式,我们能够更好地研究姿态角控制对四旋翼飞行性能的影响,并为实际飞行系统的设计提供参考。
总之,四旋翼仿真simulink模型是一种强大的工具,它支持ADRC和PID控制器的切换,以及断开位置环的纯姿态角控制模式。同时,该模型采用非线性建模方法,能够提供更精确和真实的四旋翼飞行模拟。这种模型在飞行控制系统设计和性能评估方面具有重要的应用价值,将为飞行控制系统的研究和开发提供更多可能性。期待该模型在未来的研究和实践中发挥更大的作用,推动无人机领域的创新和发展。
以上相关代码,程序地址:http://wekup.cn/648951841435.html















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









