







1.基于四个点的基础做法
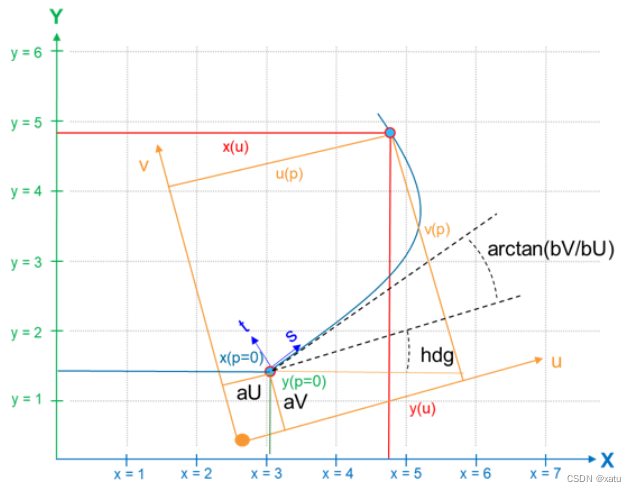
(1)先将xy坐标系转换到uv(和st坐标系一致),其中aU,aV为0;
(2)以4个点为一组,第一个点为s=0,计算后三个点到第一个点的距离,该距离为当前参数三次方程参数p的值[p1,p2,p3];
(3)使用这三个点的p值以及对应的uv,放到公示中计算参数aU, bU, cU, dU, aV, bV, cV, dV:
u(p) = aU + bU*p + cU*p2 + dU*p³
v(p) = aV + bV*p + cV*p2 + dV*p³
[aU, bU, cU, dU]*[p1,p1**2,p1**3]
(4)每组数据的hdg为第一个点到第二个点的向量与x轴夹角(弧度);
## 获取uv坐标系下的坐标值(局部坐标系与s/t坐标系保持一致)
def covt_uv(self, point, x0, y0, hdg):
x = point[0]
y = point[1]
hdg_sin = math.sin(hdg)
hdg_cos = math.cos(hdg)
u = (y - y0) * hdg_sin + (x - x0) * hdg_cos
v = (x0 - x) * hdg_sin + (y - y0) * hdg_cos
return u, v## vector2 = [1,0]
# 获取startpoint到endpoint的向量与x轴夹角(弧度)
# range:[-pi,pi]
def get_hdg_math(self, startpoint, endpoint):
point_length = get_dist(startpoint, endpoint)
dot = endpoint[0] - startpoint[0]
alph = np.arccos(dot / point_length)
if endpoint[1] - startpoint[1] > 0:
return alph
else:
return -alph## 获取uv坐标系三次参数方程参数值,三个点拟合一个三次参数方程:aU、bU和aV为0,确保参考线平滑
def get_param_dict(self, points, hdg, ps):
"""Get aU (0), bU, cU, dU, aV (0), bV, cV, dV
Args:
points (list[point]): 4 points' Length must be 4
hdg (float): hdg of the (points[0]->points[1])
ps (list[float]): distance between each point in points and points[0]
Returns:
tuple: us, vs
"""
start = points.pop(0)
x0 = start[0]
y0 = start[1]
u0, v0 = self.covt_uv(points[0], x0, y0, hdg)
u1, v1 = self.covt_uv(points[1], x0, y0, hdg)
u2, v2 = self.covt_uv(points[2], x0, y0, hdg)
a = np.array(
[
[ps[0], ps[0] ** 2, ps[0] ** 3],
[ps[1], ps[1] ** 2, ps[1] ** 3],
[ps[2], ps[2] ** 2, ps[2] ** 3],
]
)
b = np.array([u0, u1, u2])
us = linalg.solve(a, b)
us = np.insert(us, 0, 0, axis=0)
b = np.array([v0, v1, v2])
vs = linalg.solve(a, b)
vs = np.insert(vs, 0, 0, axis=0)
return us, vs2.优化道路参考线几何三次参数表达
方法:
(1)计算该参考线下每个点基于起点的距离(累加距离和)
plist=[p1,p2,p3,...,pn]
(2)生成矩阵pp
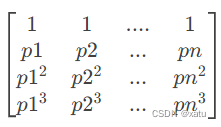
(3)生成对应u(p),v(p)列表
u(p)=[u(p1),u(p2),u(p3),...,u(pn)]
v(p)=[v(p1),v(p2),v(p3),...,v(pn)]
(4)计算p关于u,v的三次参数方程
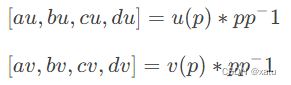
def get_uv_param(self, ulist, vlist, plist):
"""
功能:计算三次参数曲线的方程参数
参数:
ulist:[u(p1),u(p2),...]
vlist:[v(p1),v(p2),...]
plist:[p1,p2,...]
三个列表长度需一致
返回:
u:[au,bu,cu,du]
v:[av,bv,cv,dv]
"""
if len(ulist) == len(vlist) == len(plist):
pp = np.array(plist)
matrix = np.vstack((pp**0, pp**1, pp**2, pp**3))
p_inv = np.linalg.pinv(matrix)
u = np.matmul(np.array(ulist), p_inv)
v = np.matmul(np.array(vlist), p_inv)
return u, v


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









