







 该专栏为热销专栏榜 第91名
该专栏为热销专栏榜 第91名目录
1.算法概述
由于GPS信号容易受到遮挡、干扰等影响,有时会存在较大的系统噪声和量测噪声,这将引起GPS的定位精度受到较大影响。研究了一种利用扩展卡尔曼滤波对GPS定位数据进行处理的方法。对扩展卡尔曼滤波算法进行了深入分析,并结合GPS应用建立了系统的动态模型,对滤波算法的初值和系统噪声的进行了探讨。通过实测GPS数据对扩展卡尔曼滤波算法进行了验证,实测结果表明该算法对GPS应用系统的定位数据有较好的滤波效果,可以有效的提高GPS的定位精度。
扩展卡尔曼滤波(Extended Kalman Filter,EKF)是标准卡尔曼滤波在非线性情形下的一种扩展形式,EKF算法是将非线性函数进行泰勒展开,省略高阶项,保留展开项的一阶项,以此来实现非线性函数线性化,最后通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值,对信号进行滤波。扩展卡尔曼滤波(Extended Kalman Filter)是卡尔曼滤波的非线性版本,在状态转移方程确定的情况下,扩展卡尔曼滤波已经成为了非线性系统状态估计的实施标准。扩展卡尔曼滤波处理非线性问题的主要方法是泰勒展开,求非线性函数的雅可比矩阵。非线性问题一般存在于预测和观测过程,分别对这两部分求雅可比矩阵,作为卡尔曼滤波中的预测矩阵和观测矩阵。
扩展kalman滤波如下:
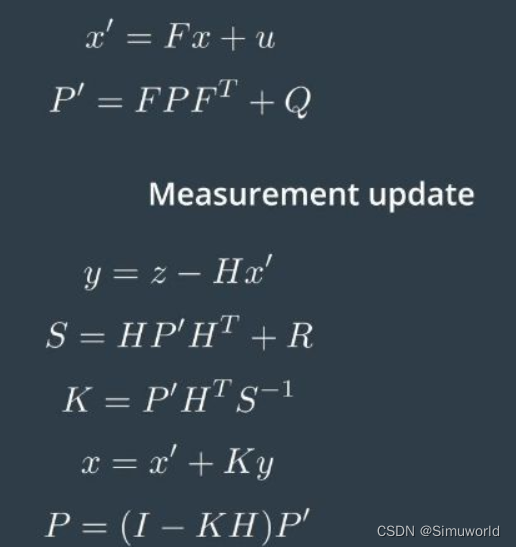
卡尔曼滤波是一种高效率的递归滤波器

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1906
1906











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











