






 文章详细介绍了相机内参的表现形式,包括P0~P3相机投影矩阵的3X4结构及其原因。解释了R0_rect修正矩阵的作用,用于使多相机成像共面。还阐述了如何将激光雷达坐标转换到相机坐标,以及将3D点云映射到2D图像平面的过程,涉及外参矩阵Tr_velo_to_cam的使用,并提到了深度估计中的距离计算。
文章详细介绍了相机内参的表现形式,包括P0~P3相机投影矩阵的3X4结构及其原因。解释了R0_rect修正矩阵的作用,用于使多相机成像共面。还阐述了如何将激光雷达坐标转换到相机坐标,以及将3D点云映射到2D图像平面的过程,涉及外参矩阵Tr_velo_to_cam的使用,并提到了深度估计中的距离计算。
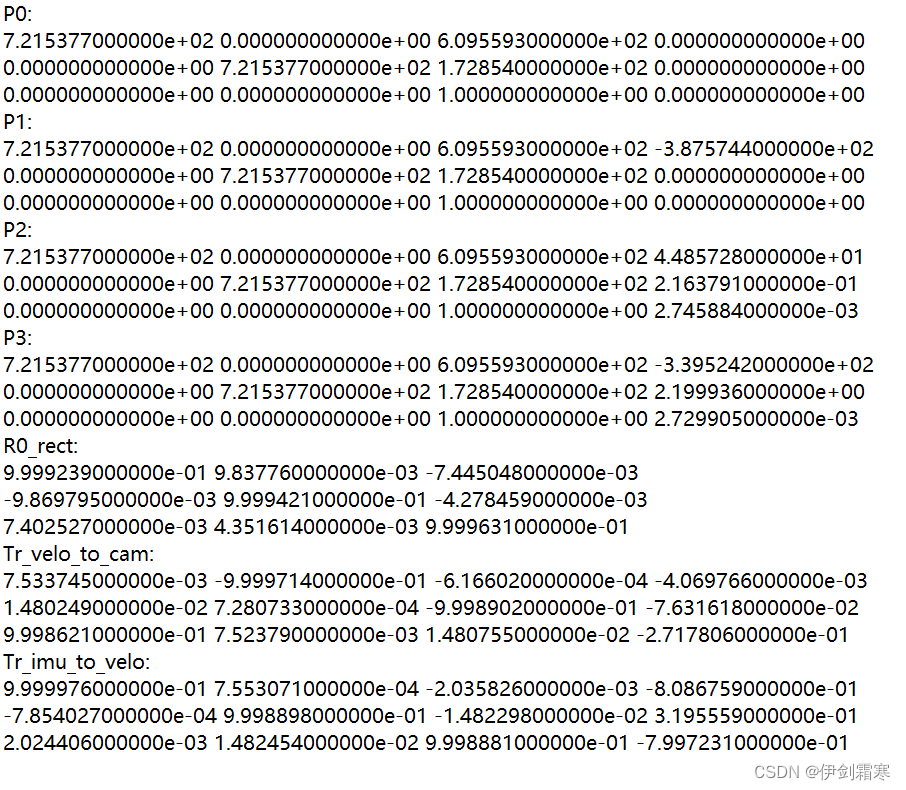
内参的表现形式
内参对应介绍
其中P0~P3是对应的相机投影矩阵,也就是相机的内参
正常情况下相机内参为3X3的矩阵,
在这里为3X4的原因是要把不同位置的相机平面统一到P0相机下
所以额外加了一列的偏移量,P0相机对应位置则为全0
相机内参公式如下:
其中和
为像素焦距,单位为像素,即单位长度的像素个数
和
为光心到 CMOS 零点的偏移,也就是相机光心在像素坐标系中的坐标
R0_rect(3X3)为P0相机的修正矩阵,目的是为了使4个相机成像达到共面的效果,保证4个相机光心在同一个xoy平面上(这个xoy面与激光雷达中心的关系???)。
于是在进行外参矩阵变化之后,需要于R0_rect相乘得到相机坐标系下的坐标
外参矩阵Tr_velo_to_cam(3X4)用于将激光雷达坐标系中的点转换到相机坐标系中
常用方法的对应公式
把激光雷达坐标系下的3d点云转到相机坐标系
N个3d点云坐标通常为(NX3)3代表(x,y,z)
需要在后面补1 (x,y,z,1)成为(NX4)
再与Tr_velo_to_cam的转置 (4X3)相乘 得到(NX3)的在各个相机坐标系下的3D点坐标
随后再乘上R0_rect修正矩阵的转置(3X3),将3d点统一到P0相机坐标系下(3X3)
NX4*4X3*3*3=NX3
把相机坐标系下的3d点云映射到图像平面2d点
同理,需要对N个3维度的点补1到(NX4)
需要参考相机内参的公式
再与P0~P3相机内参的转置(4X3)相乘,得到上式中最左边的表示,之后除以深度Z便可以得到在对应相机平面的坐标。
假如需要知道与该相机的距离(例如在深度估计任务中),则需要在深度上减去相机内参在Z轴上的偏移量
若有不足,请批评指正

















 481
481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









