










相关源码下载:https://download.csdn.net/download/Stone_Wang_MZ/15008731
- 理论原理
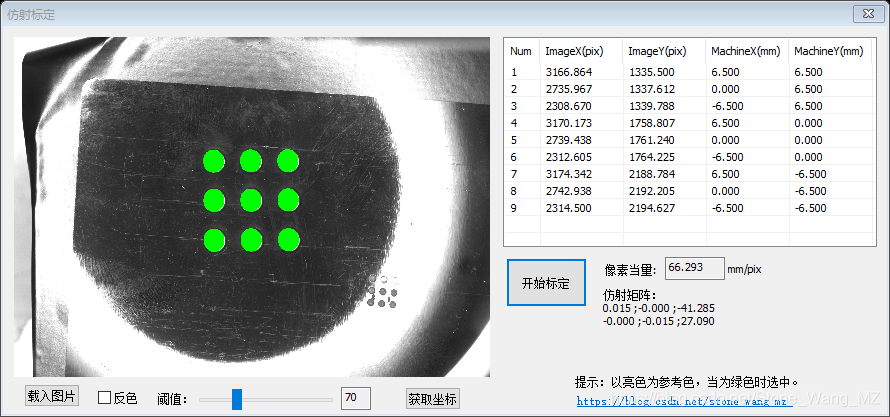
图像坐标系与机器坐标系(包括机器人坐标、运动平台、激光振镜)建立关系后,在应用过程中只要知道相机视野中图像的某个坐标,即可知道对应的机器坐标。
我们知道建立两个平面之间的关系最少需要三个点,即三个点即可完成标定,叫九点标定只是因为为了提高精度,在项目中比较常用。该模块中,通过自动找标定图像中圆的圆心作为基准点,最少需要四个点,最多九个点。
注意:当图像坐标与机器坐标的相对位置发生变化时,需要重新进行手眼标定。
- 模块使用事项
1、使用效果:
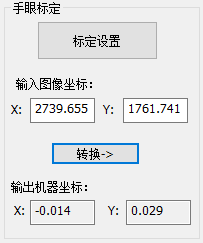
验证:
说明:可通过提高相机像素、加强图片质量、提高圆心坐标准确度等措施提高精度。
2、Demo说明
使用之前需要准备好Halcon环境,这里不介绍。该Demo采用系统环境变量链接需要的头文件与库。参考Demo,找到CCaliAffine.dll,该dll包含函数接口:
DlgShowEx:打开对话框设置修改参数后获取相机。
GetPointEx:输入图像坐标后通过获取的标定参数获取到ji'q机器坐标
微信:gaoshijue666,有问题或者喜欢机器视觉的朋友,欢迎咨询讨论~

















 1814
1814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









