








一、 论文介绍
论文链接:https://arxiv.org/abs/2311.11587
代码链接:https://github.com/CV-ZhangXin/AKConv/tree/main
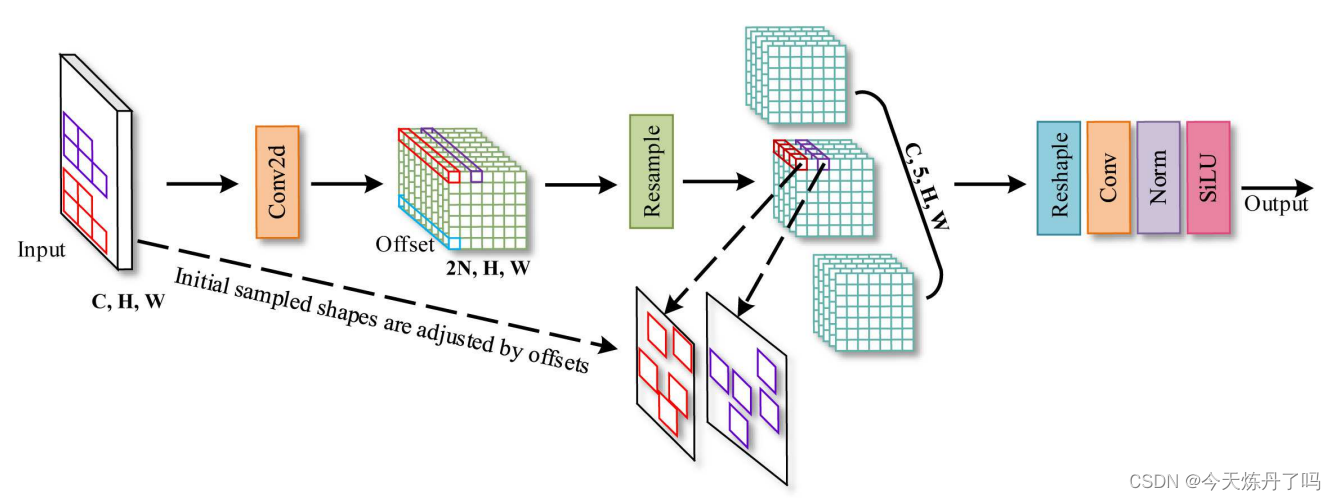
论文速览::AKConv是2023年11月发表的一种可变卷积核,赋予卷积核任意数量的参数和任意采样形状,以解决具有固定样本形状和正方形的卷积核不能很好地适应不断变化的目标的问题点可以为网络开销和性能之间的权衡提供更丰富的选择。 AKConv的核心思想在于它为卷积核提供了任意数量的参数和任意采样形状,能够使用任意数量的参数(如1,2,3,4,5,6,7等)来提取姝征,这在标准卷积和可变形卷积中并未实现。AKConv能够根据硬件环境,使卷积参数的数星呈线性增减((非常适用于轻量化模型)。
总结:AKConv是一种具有任意数量的参数和任意采样形状的可变卷积核,对不规则特征有更好的提取效果。
二、 加入到RT-DETR中
2.1 复制代码
复制代码粘到ultralytics->nn->modules->conv.py文件中,在顶部导入torch.nn.functional包,(torch.nn.functional as F),将代码粘贴于下方,并在__all__中声明,如下图所示:
# Ultralytics YOLO 🚀, AGPL-3.0 license
"""Convolution modules."""
import math
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from einops import rearrange
__all__ = (
"Conv",
"Conv2",
"LightConv",
"DWConv",
"DWConvTranspose2d",
"ConvTranspose",
"Focus",
"GhostConv",
"ChannelAttention",
"SpatialAttention",
"CBAM",
"Concat",
"RepConv",
"AKConv",
)
class AKConv(nn.Module):
def __init__(self, inc, outc, num_param, stride=1, bias=None):
super(AKConv, self).__init__()
self.num_param = num_param
self.stride = stride
self.conv = nn.Sequential(nn.Conv2d(inc, outc, kernel_size=(num_param, 1), stride=(num_param, 1), bias=bias),
nn.BatchNorm2d(outc),
nn.SiLU()) # the conv adds the BN and SiLU to compare original Conv in YOLOv5.
self.p_conv = nn.Conv2d(inc, 2 * num_param, kernel_size=3, padding=1, stride=stride)
nn.init.constant_(self.p_conv.weight, 0)
self.p_conv.register_full_backward_hook(self._set_lr)
@staticmethod
def _set_lr(module, grad_input, grad_output):
grad_input = (grad_input[i] * 0.1 for i in range(len(grad_input)))
grad_output = (grad_output[i] * 0.1 for i in range(len(grad_output)))
def forward(self, x):
# N is num_param.
offset = self.p_conv(x)
dtype = offset.data.type()
N = offset.size(1) // 2
# (b, 2N, h, w)
p = self._get_p(offset, dtype)
# (b, h, w, 2N)
p = p.contiguous().permute(0, 2, 3, 1)
q_lt = p.detach().floor()
q_rb = q_lt + 1
q_lt = torch.cat([torch.clamp(q_lt[..., :N], 0, x.size(2) - 1), torch.clamp(q_lt[..., N:], 0, x.size(3) - 1)],
dim=-1).long()
q_rb = torch.cat([torch.clamp(q_rb[..., :N], 0, x.size(2) - 1), torch.clamp(q_rb[..., N:], 0, x.size(3) - 1)],
dim=-1).long()
q_lb = torch.cat([q_lt[..., :N], q_rb[..., N:]], dim=-1)
q_rt = torch.cat([q_rb[..., :N], q_lt[..., N:]], dim=-1)
# clip p
p = torch.cat([torch.clamp(p[..., :N], 0, x.size(2) - 1), torch.clamp(p[..., N:], 0, x.size(3) - 1)], dim=-1)
# bilinear kernel (b, h, w, N)
g_lt = (1 + (q_lt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_lt[..., N:].type_as(p) - p[..., N:]))
g_rb = (1 - (q_rb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_rb[..., N:].type_as(p) - p[..., N:]))
g_lb = (1 + (q_lb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_lb[..., N:].type_as(p) - p[..., N:]))
g_rt = (1 - (q_rt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_rt[..., N:].type_as(p) - p[..., N:]))
# resampling the features based on the modified coordinates.
x_q_lt = self._get_x_q(x, q_lt, N)
x_q_rb = self._get_x_q(x, q_rb, N)
x_q_lb = self._get_x_q(x, q_lb, N)
x_q_rt = self._get_x_q(x, q_rt, N)
# bilinear
x_offset = g_lt.unsqueeze(dim=1) * x_q_lt + \
g_rb.unsqueeze(dim=1) * x_q_rb + \
g_lb.unsqueeze(dim=1) * x_q_lb + \
g_rt.unsqueeze(dim=1) * x_q_rt
x_offset = self._reshape_x_offset(x_offset, self.num_param)
out = self.conv(x_offset)
return out
# generating the inital sampled shapes for the AKConv with different sizes.
def _get_p_n(self, N, dtype):
base_int = round(math.sqrt(self.num_param))
row_number = self.num_param // base_int
mod_number = self.num_param % base_int
p_n_x, p_n_y = torch.meshgrid(
torch.arange(0, row_number),
torch.arange(0, base_int))
p_n_x = torch.flatten(p_n_x)
p_n_y = torch.flatten(p_n_y)
if mod_number > 0:
mod_p_n_x, mod_p_n_y = torch.meshgrid(
torch.arange(row_number, row_number + 1),
torch.arange(0, mod_number))
mod_p_n_x = torch.flatten(mod_p_n_x)
mod_p_n_y = torch.flatten(mod_p_n_y)
p_n_x, p_n_y = torch.cat((p_n_x, mod_p_n_x)), torch.cat((p_n_y, mod_p_n_y))
p_n = torch.cat([p_n_x, p_n_y], 0)
p_n = p_n.view(1, 2 * N, 1, 1).type(dtype)
return p_n
# no zero-padding
def _get_p_0(self, h, w, N, dtype):
p_0_x, p_0_y = torch.meshgrid(
torch.arange(0, h * self.stride, self.stride),
torch.arange(0, w * self.stride, self.stride))
p_0_x = torch.flatten(p_0_x).view(1, 1, h, w).repeat(1, N, 1, 1)
p_0_y = torch.flatten(p_0_y).view(1, 1, h, w).repeat(1, N, 1, 1)
p_0 = torch.cat([p_0_x, p_0_y], 1).type(dtype)
return p_0
def _get_p(self, offset, dtype):
N, h, w = offset.size(1) // 2, offset.size(2), offset.size(3)
# (1, 2N, 1, 1)
p_n = self._get_p_n(N, dtype)
# (1, 2N, h, w)
p_0 = self._get_p_0(h, w, N, dtype)
p = p_0 + p_n + offset
return p
def _get_x_q(self, x, q, N):
b, h, w, _ = q.size()
padded_w = x.size(3)
c = x.size(1)
# (b, c, h*w)
x = x.contiguous().view(b, c, -1)
# (b, h, w, N)
index = q[..., :N] * padded_w + q[..., N:] # offset_x*w + offset_y
# (b, c, h*w*N)
index = index.contiguous().unsqueeze(dim=1).expand(-1, c, -1, -1, -1).contiguous().view(b, c, -1)
x_offset = x.gather(dim=-1, index=index).contiguous().view(b, c, h, w, N)
return x_offset
# Stacking resampled features in the row direction.
@staticmethod
def _reshape_x_offset(x_offset, num_param):
b, c, h, w, n = x_offset.size()
# using Conv3d
# x_offset = x_offset.permute(0,1,4,2,3), then Conv3d(c,c_out, kernel_size =(num_param,1,1),stride=(num_param,1,1),bias= False)
# using 1 × 1 Conv
# x_offset = x_offset.permute(0,1,4,2,3), then, x_offset.view(b,c×num_param,h,w) finally, Conv2d(c×num_param,c_out, kernel_size =1,stride=1,bias= False)
# using the column conv as follow, then, Conv2d(inc, outc, kernel_size=(num_param, 1), stride=(num_param, 1), bias=bias)
x_offset = rearrange(x_offset, 'b c h w n -> b c (h n) w')
return x_offset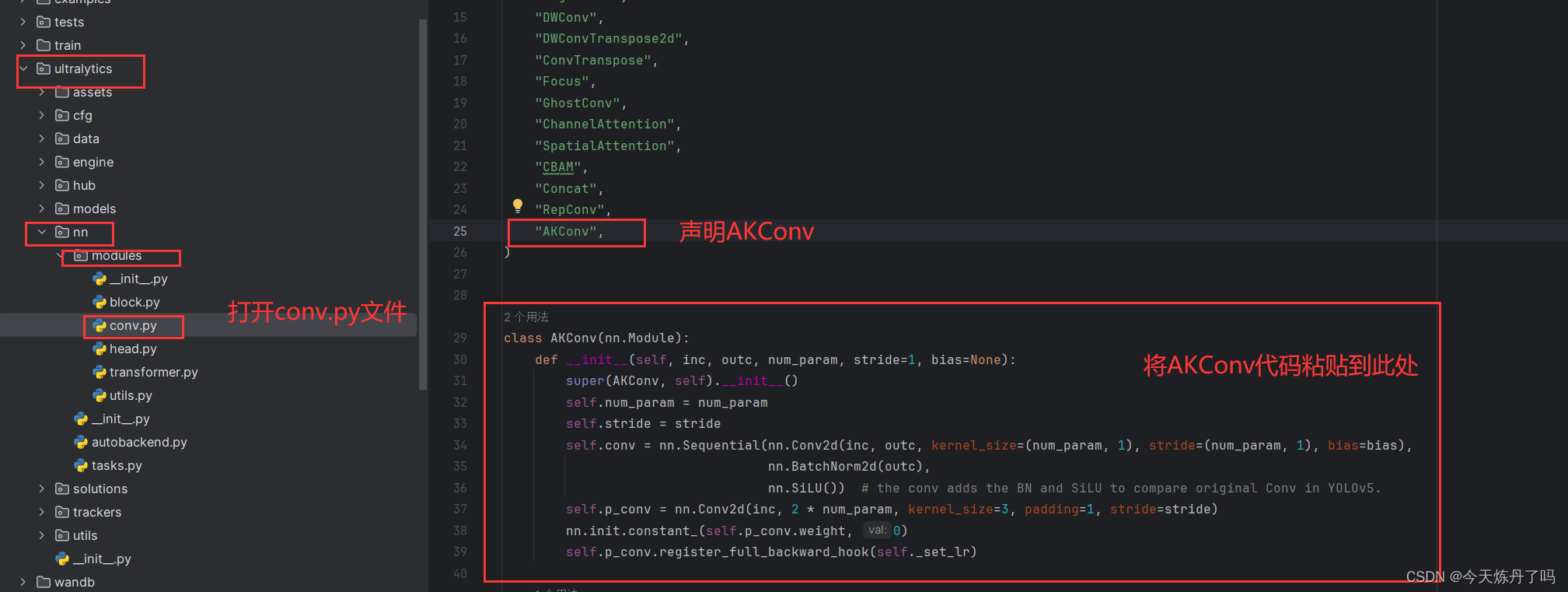
2.2 更改modules.__init__.py文件
打开ultralytics->nn->modules->__init__.py,在第64行与81行加入AKConv进行声明。

2.3 更改task.py文件
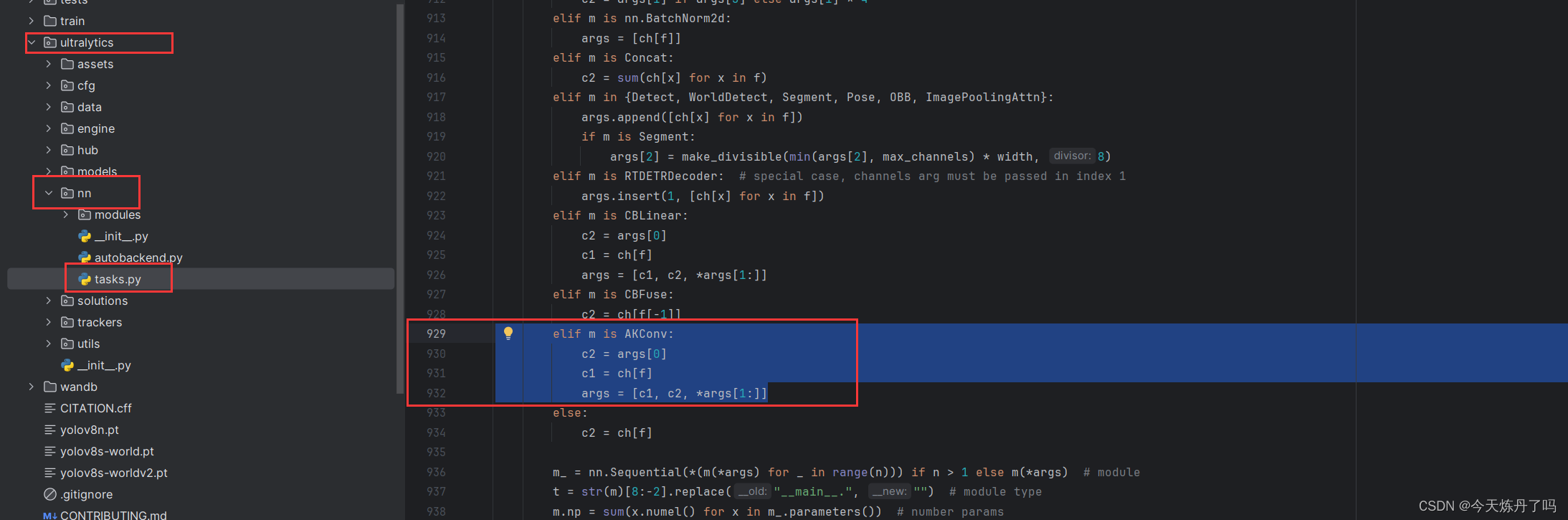
打开ultralytics->nn路径下的tasks.py文件,首先在第51行加入AKConv导入模块,然后在第928行(或其他合适的位置)加入下方代码:
elif m is AKConv:
c2 = args[0]
c1 = ch[f]
args = [c1, c2, *args[1:]]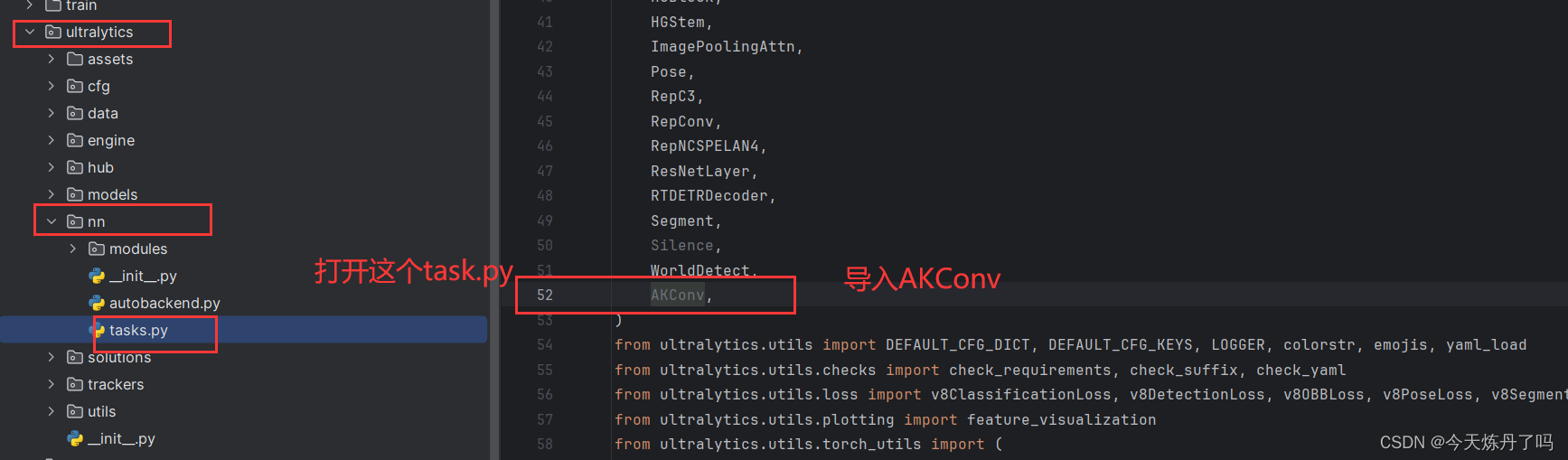
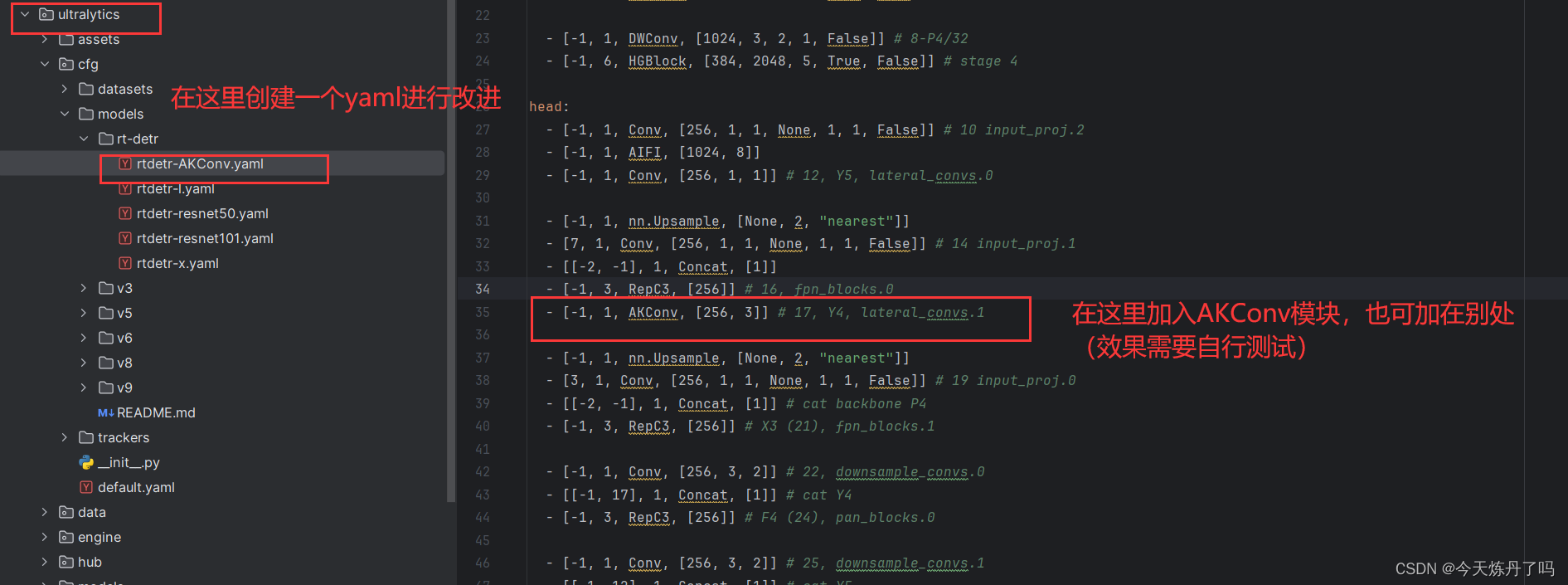
2.4 更改yaml文件
创建yaml文件,使用AKConv替换yaml文件中原有的Conv模块。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, HGStem, [32, 48]] # 0-P2/4
- [-1, 6, HGBlock, [48, 128, 3]] # stage 1
- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8
- [-1, 6, HGBlock, [96, 512, 3]] # stage 2
- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P3/16
- [-1, 6, HGBlock, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut
- [-1, 6, HGBlock, [192, 1024, 5, True, True]]
- [-1, 6, HGBlock, [192, 1024, 5, True, True]] # stage 3
- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P4/32
- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2
- [-1, 1, AIFI, [1024, 8]]
- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1
- [[-2, -1], 1, Concat, [1]]
- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0
- [-1, 1, AKConv, [256, 3]] # 17, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0
- [[-2, -1], 1, Concat, [1]] # cat backbone P4
- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1
- [-1, 1, Conv, [256, 3, 2]] # 22, downsample_convs.0
- [[-1, 17], 1, Concat, [1]] # cat Y4
- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0
- [-1, 1, Conv, [256, 3, 2]] # 25, downsample_convs.1
- [[-1, 12], 1, Concat, [1]] # cat Y5
- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1
- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)
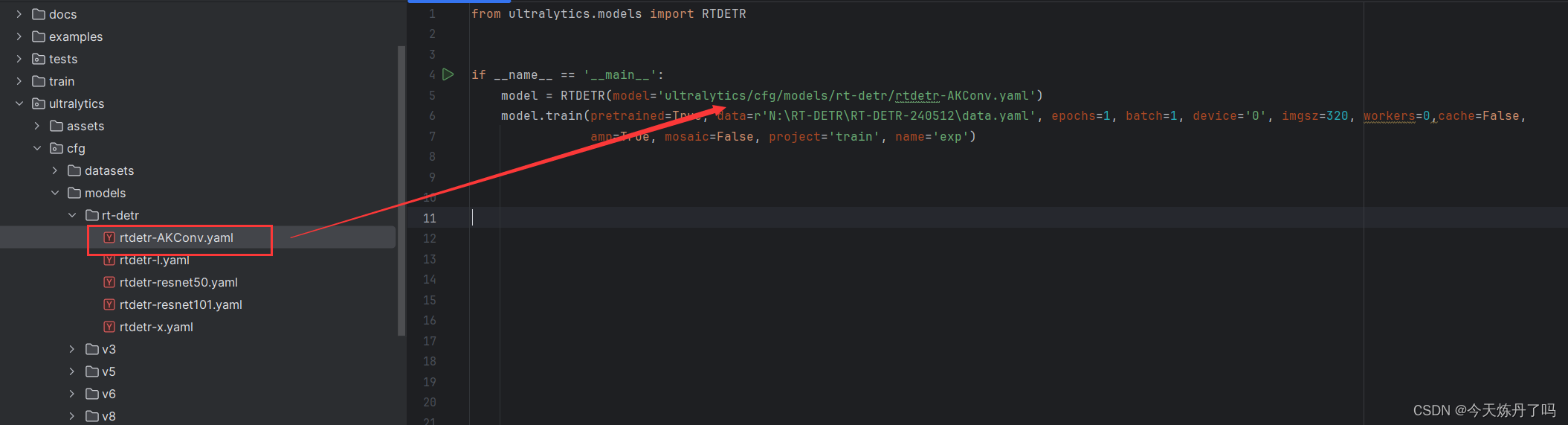
2.5 修改train.py文件
在train.py脚本中填入创建好的yaml路径,运行即可训练。

















 2811
2811











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









