








专栏介绍:YOLOv9改进系列 | 包含深度学习最新创新,助力高效涨点!!!
1. SPPELAN
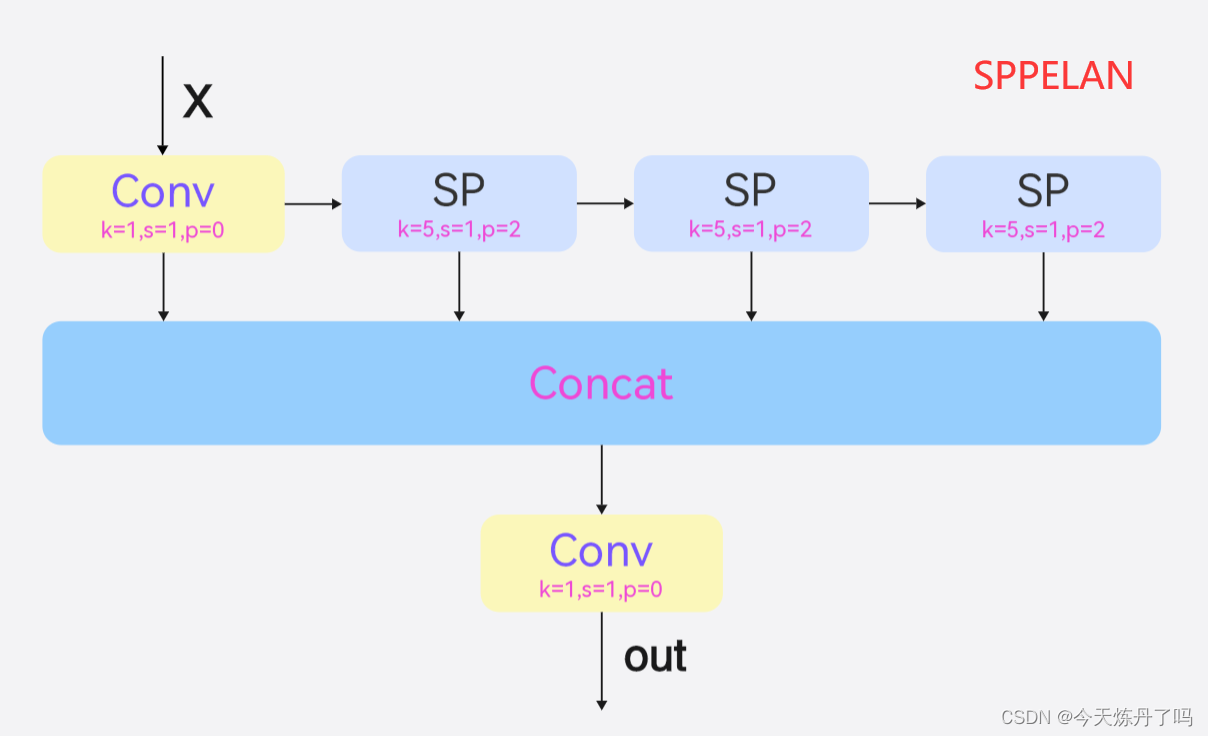
SPPELAN是YOLOv9中与SPPF类似的模块,整体结构及代码如下,代码中SP模块即为最大池化。
class SP(nn.Module):
def __init__(self, k=3, s=1):
super(SP, self).__init__()
self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
def forward(self, x):
return self.m(x)
class SPPELAN(nn.Module):
# spp-elan
def __init__(self, c1, c2, c3): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = c3
self.cv1 = Conv(c1, c3, 1, 1)
self.cv2 = SP(5)
self.cv3 = SP(5)
self.cv4 = SP(5)
self.cv5 = Conv(4*c3, c2, 1, 1)
def forward(self, x):
y = [self.cv1(x)]
y.extend(m(y[-1]) for m in [self.cv2, self.cv3, self.cv4])
return self.cv5(torch.cat(y, 1))

















 1654
1654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









