






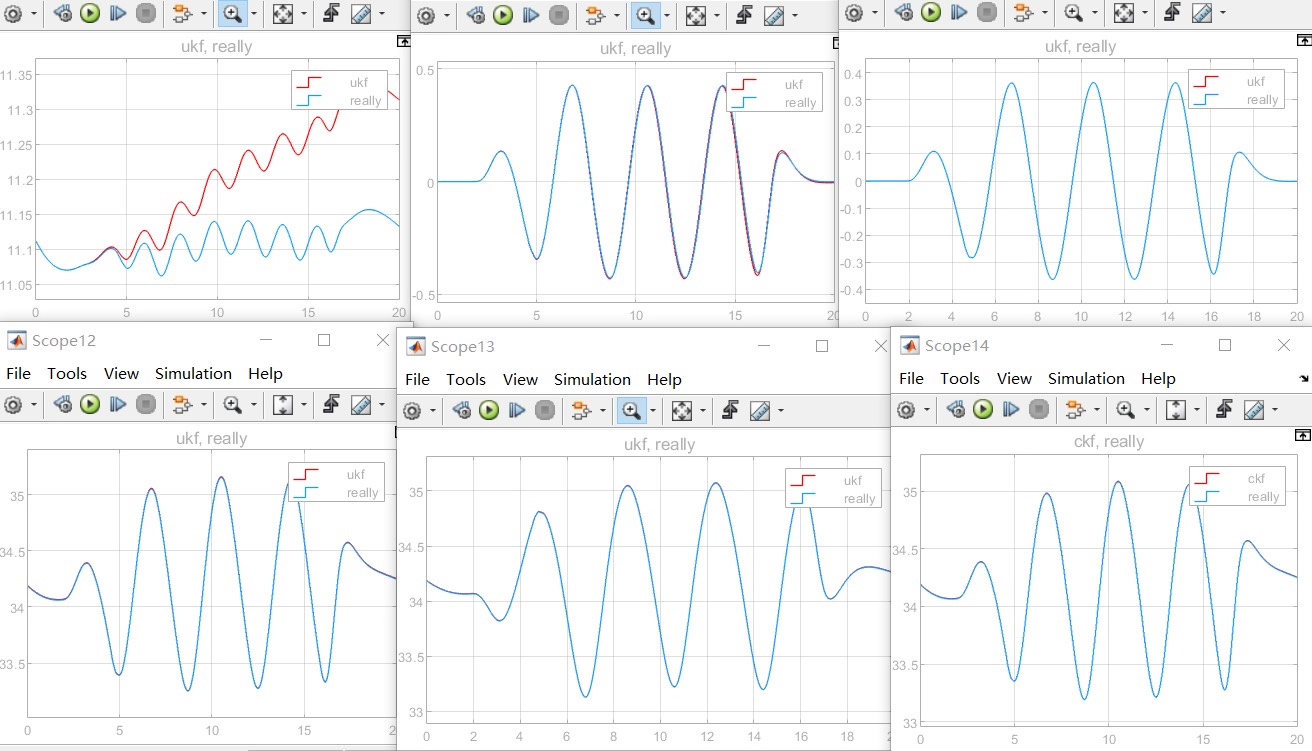
基于分布式驱动电动汽车的车辆状态估计,分别采用无迹卡尔曼,容积卡尔曼,高阶容积卡尔曼观测器等,可估计包括纵向速度,质心侧偏角,横摆角速度,以及四个车轮角速度七个状态。
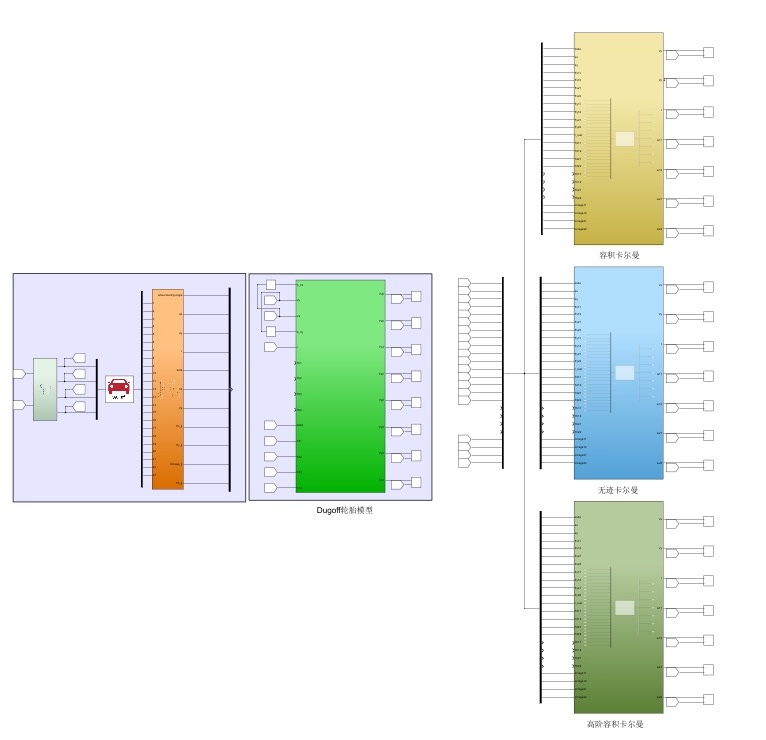
模型中第一个模块是四轮驱动电机;第二个模块是carsim输出的真实参数,包括汽车所受横向力,纵向力,驱动力矩等:第三个模块是基于dugoff计算轮胎力模块,该模块可以计算纵向力和横向力。
后面的模块是关于无迹卡尔曼,容积卡尔曼,高阶容积卡尔曼对车辆状态进行估计,可估计包括纵向速度,横摆角速度,质心侧偏角以及四个车轮角速度七个状态。
模型和代码,可供自己参考和学习。
本模型是基于simulink与carsim联合仿真,ckf是由s function进行编写,提供相关文献。
如果需要在电机无传感器控制和车辆状态估计上改进卡尔曼滤波,比如平方根容积卡尔曼等
ID:57700700540594690
嚣张的奥利奥
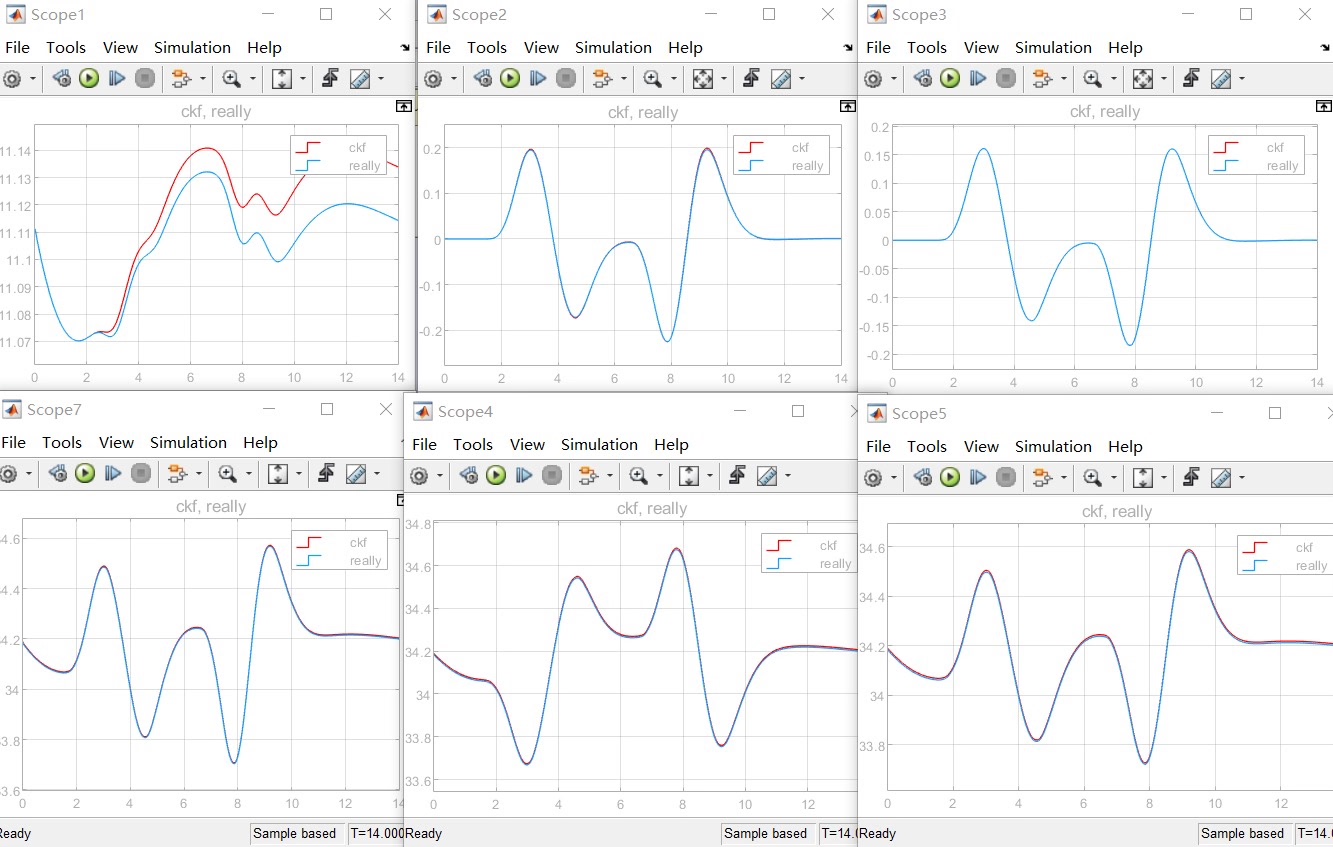
基于分布式驱动电动汽车的车辆状态估计,是一个重要的研究领域。在该领域中,无迹卡尔曼滤波、容积卡尔曼滤波以及高阶容积卡尔曼观测器等方法被广泛应用。这些方法能够准确估计车辆的纵向速度、质心侧偏角、横摆角速度以及四个车轮的角速度等七个状态。
首先,模型中的第一个模块是四轮驱动电机。这个模块是分布式驱动电动汽车的核心部分,通过驱动车轮来实现汽车的动力传输。第二个模块是以Carsim为基础输出的真实参数,包括汽车所受的横向力、纵向力和驱动力矩等。这些参数是基于实际情况进行测量和计算得到的,对于车辆状态的估计具有重要意义。第三个模块是基于Dugoff模型计算轮胎力的模块,通过该模块可以计算车辆在纵向和横向上所受到的力。
在车辆状态估计的后续模块中,无迹卡尔曼滤波、容积卡尔曼滤波和高阶容积卡尔曼观测器被用于对车辆状态进行估计。这些滤波算法根据已知的输入和观测值,通过对状态进行预测和校正,得到对状态的估计值。其中,无迹卡尔曼滤波是一种无模型误差的非线性滤波方法,对于非线性系统的估计具有很好的效果。容积卡尔曼滤波是一种扩展了状态向量和协方差矩阵的滤波方法,能够更准确地估计系统的状态。高阶容积卡尔曼观测器是在容积卡尔曼滤波的基础上,增加了高阶项的观测器,能够更精确地估计系统的状态。
总体而言,基于分布式驱动电动汽车的车辆状态估计模型结构清晰,并且提供了对应的代码供参考学习。模型基于Simulink与Carsim联合仿真,CKF是通过S函数进行编写的。此外,还提供了相关文献供进一步研究参考。
在电机无传感器控制和车辆状态估计方面,可以进一步改进卡尔曼滤波,例如使用平方根容积卡尔曼滤波等方法。这些改进能够提高对电机无传感器控制和车辆状态估计的准确性和稳定性。
针对这个研究领域,未来的研究方向可以有很多。比如,进一步优化无迹卡尔曼滤波、容积卡尔曼滤波和高阶容积卡尔曼观测器的算法,以提高对车辆状态的估计精度。此外,还可以研究如何应用深度学习等新兴技术来改进车辆状态估计的方法。最后,还可以探索如何将车辆状态估计模型与其他系统进行融合,以实现更全面和准确的车辆控制。
总之,基于分布式驱动电动汽车的车辆状态估计是一个具有挑战性和重要性的研究领域。通过采用无迹卡尔曼滤波、容积卡尔曼滤波和高阶容积卡尔曼观测器等方法,我们能够准确地对车辆的状态进行估计,为车辆控制和驾驶安全提供支持。未来的研究可以进一步改进现有的算法,并探索新的方法和技术,以推动车辆状态估计领域的发展。
【相关代码,程序地址】:http://fansik.cn/700540594690.html
















 482
482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









