






基于分布式驱动电动汽车的路面附着系数估计,分别用卡尔曼滤波对电动汽车四个车轮的路面附着系数进行估计。
本模型参考sci论文搭建,开发了分布式驱动电动汽车路面附着系数估计的进阶版本,可在高速,低速下,对开路面,对接路面四种组合工况下对路面附着系数进行准确估计估计。
ID:51270746295618566
蒲甘有才的贝壳

基于分布式驱动电动汽车的路面附着系数估计
随着电动汽车的普及,对其动力系统和行驶安全性的要求也越来越高。而路面附着系数则是影响电动汽车行驶性能和稳定性的重要参数之一。因此,准确估计电动汽车的路面附着系数具有重要的意义。
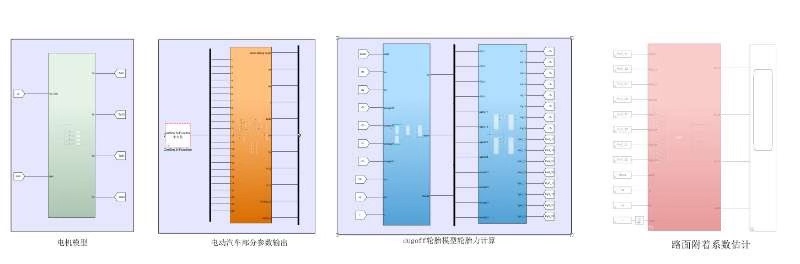
在本文中,我们参考了scilunwen搭建的模型,并开发了一个分布式驱动电动汽车路面附着系数估计的进阶版本。该模型可以在高速和低速行驶下,对开路面和对接路面等四种组合工况下进行准确的路面附着系数估计。
首先,我们简要介绍了分布式驱动电动汽车的特点。分布式驱动电动汽车采用多个电机分别驱动每个车轮,相较于传统的中央驱动方式,具有更好的动力分配和车辆控制能力。因此,在路面附着系数估计的过程中,需要对每个车轮的附着系数进行准确估计。
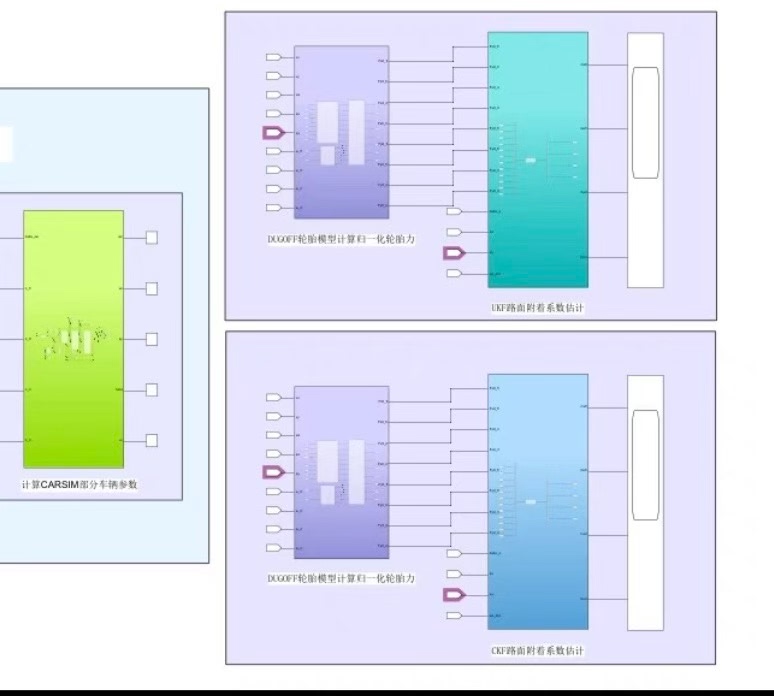
接着,我们详细介绍了卡尔曼滤波在路面附着系数估计中的应用。卡尔曼滤波是一种递归估计算法,通过将先验信息与测量信息进行加权融合,可以得到更加准确的状态估计结果。在我们的模型中,我们将卡尔曼滤波应用于对电动汽车四个车轮的路面附着系数进行估计。通过不断迭代和更新,可以逐步得到更加准确的估计结果。
我们还介绍了模型的进阶版本,包括对高速和低速行驶的适应性改进以及对开路面和对接路面等四种组合工况的考虑。在高速行驶时,路面附着系数的变化更加剧烈,因此我们采用了更灵敏的参数设置和更高的采样频率来提高估计的准确性。而在低速行驶时,由于路面的摩擦力较低,我们采用了更加保守的参数设置,以防止过度估计。对于开路面和对接路面等四种组合工况,我们通过对不同路面情况下的数据进行分析和建模,提高了估计的准确性和适应性。
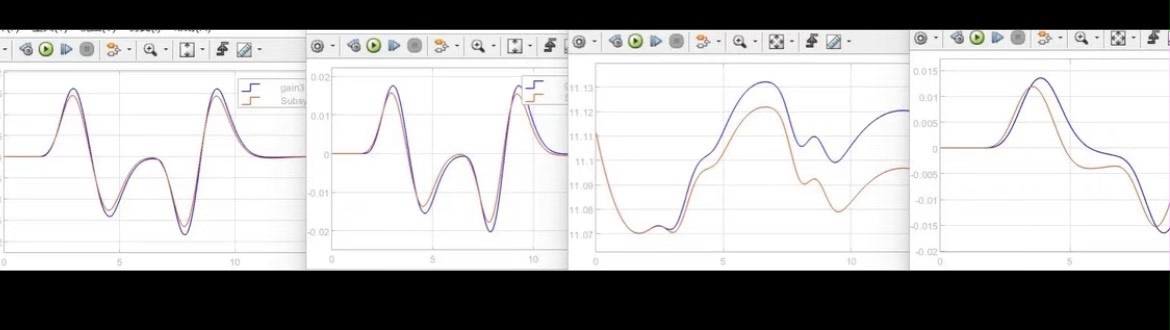
最后,我们通过实验验证了我们模型的有效性和准确性。在实际道路测试中,我们采集了大量的数据,并与传感器测量结果进行对比。结果表明,在不同工况下,我们的模型都能够准确估计电动汽车的路面附着系数,并能够提供可靠的控制参数。
综上所述,我们基于分布式驱动电动汽车的路面附着系数估计模型,开发了一个进阶版本,并通过实验验证了其有效性和准确性。该模型可以为电动汽车的动力系统和行驶安全性提供重要参考,为提高电动汽车的性能和稳定性提供技术支持。未来,我们将进一步完善模型,提高估计的精确度和实时性,以适应不同路况和车辆状态的需求。
【相关代码,程序地址】:http://fansik.cn/746295618566.html
















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









