






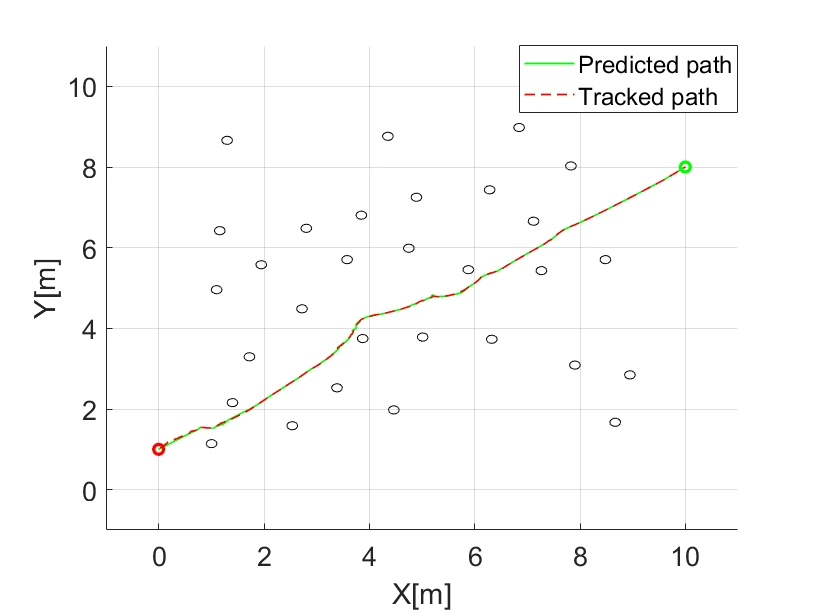
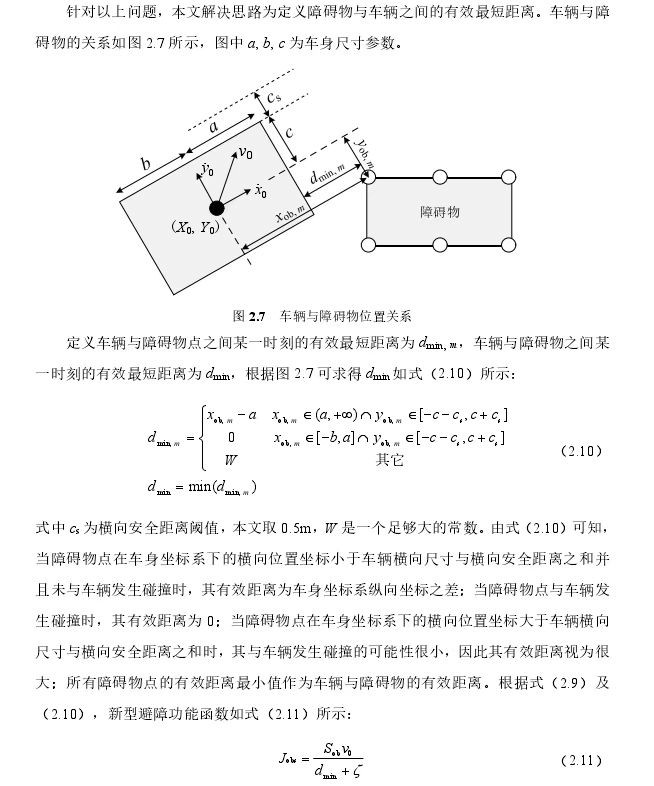
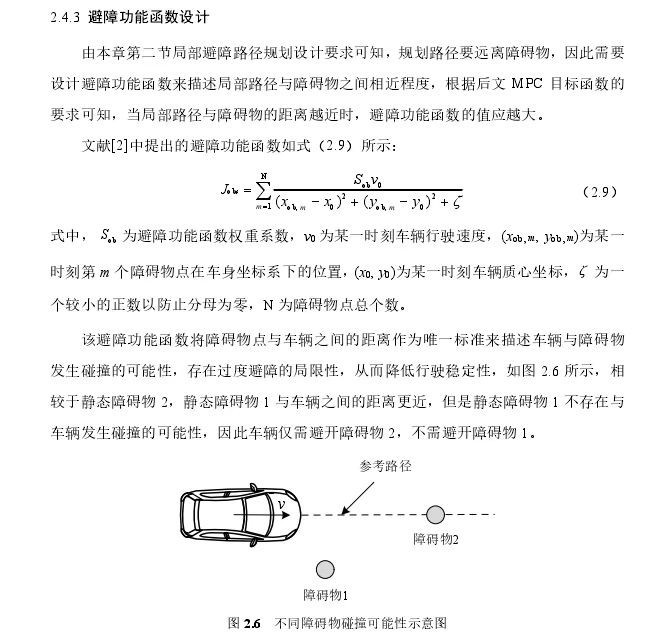
基于nmpc的路径避障跟踪控制算法,考虑原有势场避障功能函数局限性(图1),采用更好描述车辆碰撞情况的新型功能函数,作为非线性优化路径规划方法(图2),采用nmpc作为底层控制,实现仿真改变任一起始位置最优避障轨迹(图3)。
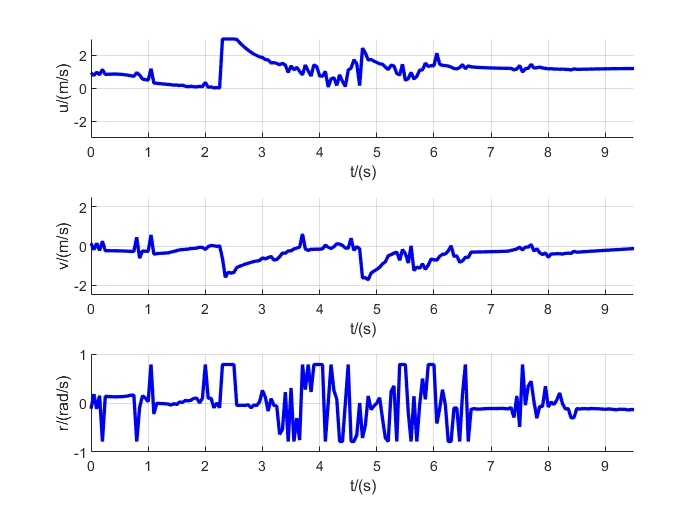
适应无人驾驶路径跟踪,自动泊车路径跟踪,输出横向、纵向,旋转角速度等图(图4)
仅供学习算法使用
ID:51150702761598495
土红的糙叶卷柏yy^-^
基于NMPC的路径避障跟踪控制算法
引言
随着无人驾驶技术的不断进步,路径避障问题成为了自动驾驶系统中的一个重要挑战。传统的路径规划方法往往采用势场法来实现避障功能,然而势场法存在着一定的局限性。本文提出了一种基于NMPC(非线性模型预测控制)的路径避障跟踪控制算法,通过采用新的功能函数来描述车辆碰撞情况,实现了更好的路径规划效果。
算法设计
为了克服传统势场法的局限性,我们采用了一种新的功能函数来描述车辆碰撞情况。这一功能函数结合了车辆当前的位置和速度信息,并对车辆碰撞风险进行了准确的量化。基于这一新的功能函数,我们提出了一种非线性优化路径规划方法。
具体而言,我们将路径规划问题转化为一个非线性优化问题,通过最小化碰撞风险指标来得到最优的避障路径。在求解过程中,我们采用NMPC作为底层控制器。NMPC通过预测车辆在未来一段时间内的运动轨迹,并基于这一轨迹进行控制策略的优化,实现了精准的路径跟踪。
仿真实验
为了验证我们算法的有效性,我们进行了一系列的仿真实验。在仿真环境中,我们改变起始位置,并运行我们的算法来得到最优的避障路径。实验结果表明,我们的算法在不同起始位置下都能够成功生成避障轨迹,从而实现了路径跟踪的目标。
应用展望
我们的算法具有广泛的应用前景。首先,它可以应用于无人驾驶路径跟踪系统中,实现安全、高效的自动驾驶功能。其次,它也可以应用于自动泊车系统中,实现精准的车辆停放操作。除此之外,我们的算法还可以输出横向、纵向和旋转角速度等图,在路径跟踪过程中提供全面的控制信息。
总结
本文提出了一种基于NMPC的路径避障跟踪控制算法,通过采用新的功能函数来描述车辆碰撞情况,实现了更好的路径规划效果。仿真实验结果表明,我们的算法能够在不同起始位置下生成最优的避障轨迹,并具有较好的应用前景。该算法为无人驾驶和自动泊车等领域的路径规划和跟踪问题提供了一种有效的解决方案。
参考图表:
图1:原有势场避障功能函数局限性示意图
图2:新型功能函数示意图
图3:利用NMPC实现的仿真避障轨迹图
图4:输出横向、纵向和旋转角速度等图示意图
该论文仅供学习算法使用,致力于在无人驾驶和自动泊车领域的研究与探索。
思考与展望
尽管我们的算法在路径避障和跟踪方面取得了令人满意的结果,但仍然存在一些挑战和改进的空间。例如,我们可以进一步优化功能函数的设计,以提高路径规划的准确性和鲁棒性。此外,我们还可以考虑引入其他控制策略,如模糊控制和强化学习,以进一步提升路径跟踪的性能。
总之,基于NMPC的路径避障跟踪控制算法为无人驾驶和自动泊车系统中的路径规划和跟踪问题提供了一种有效解决方案。通过采用新的功能函数和非线性优化方法,我们能够实现更好的路径规划效果,并在仿真实验中验证了算法的有效性。未来的研究工作将重点关注算法的优化和改进,以进一步提升路径跟踪的精度和鲁棒性。
【相关代码,程序地址】:http://fansik.cn/702761598495.html
















 1162
1162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









