






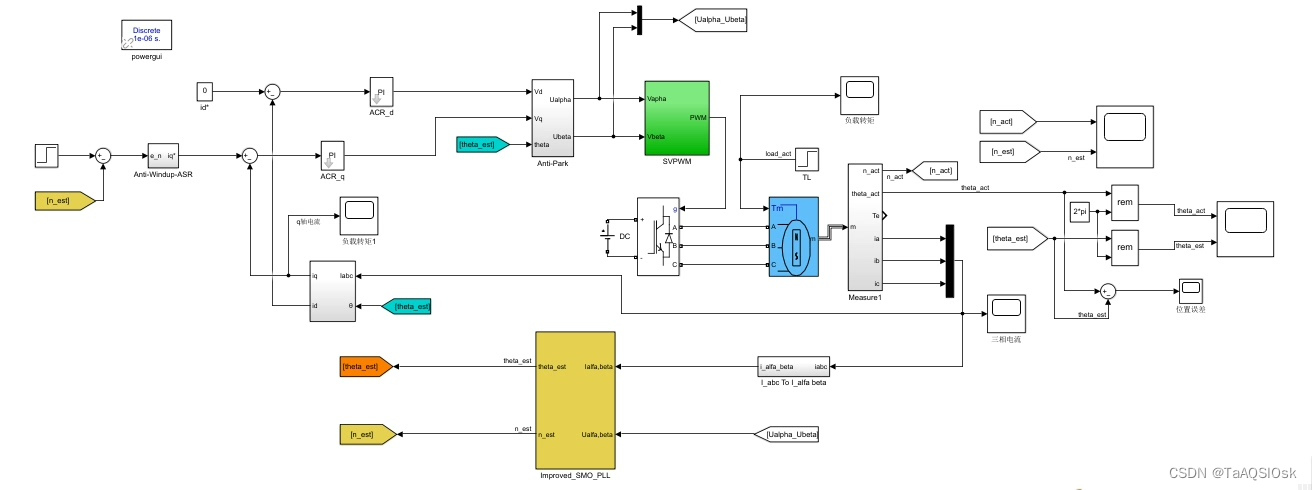
基于转子磁链模型的改进SMO滑模观测器,用于实现PMSM永磁同步电机的无传感器矢量控制。
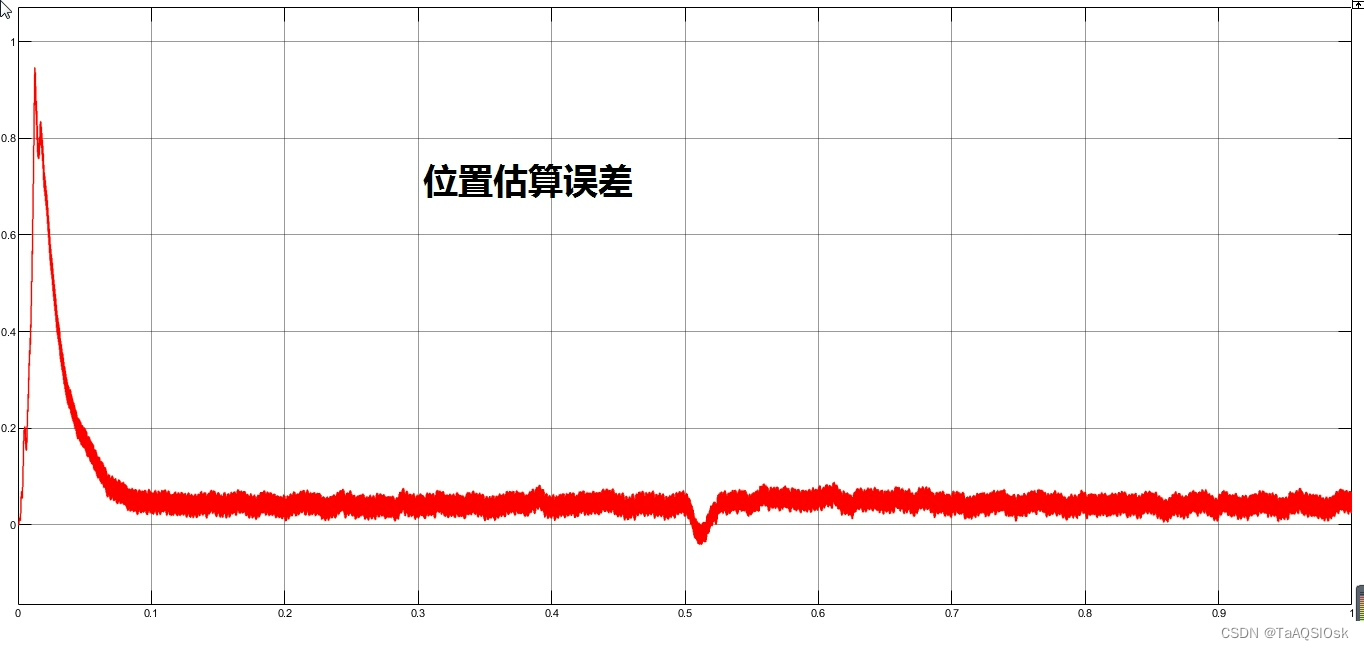
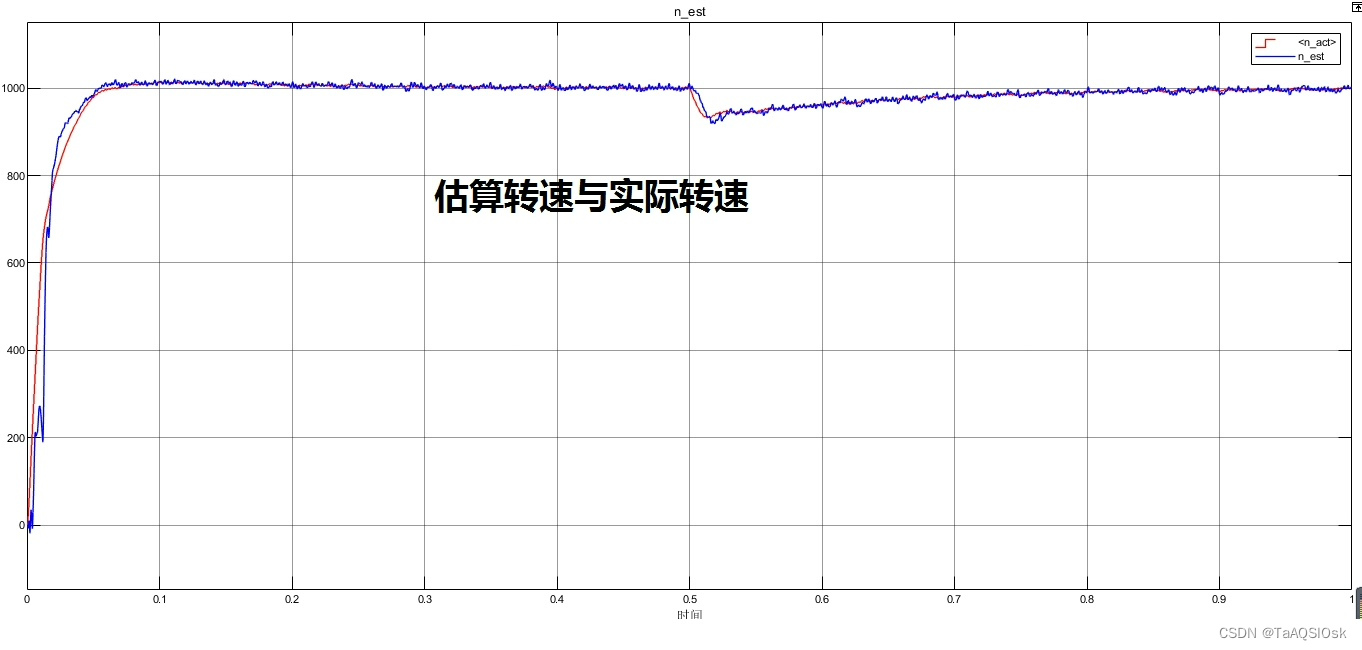
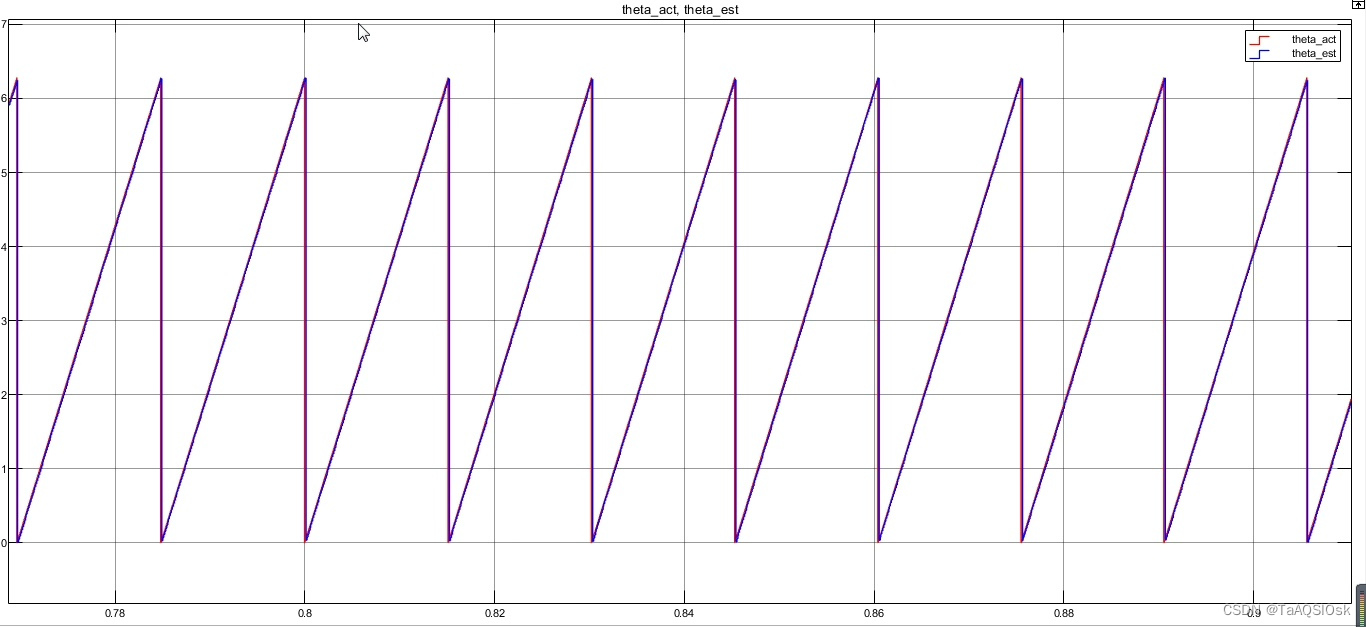
角度观测精度高,误差小,且可以有效解决传统SMO观测器的带载转速抖动问题,以及低转速下由于反电动势幅值太低导致的转速估算精度低,同时可以实现电机转向切换时的精确角度估算。
。
基于转子磁链模型的改进SMO滑模观测器,用于实现PMSM永磁同步电机的无传感器矢量控制。
在现代工业领域,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)由于其高效率、高功率因数和低噪音等优点,被广泛应用于电动汽车、工业自动化和家电等领域。传统的PMSM矢量控制方法需要使用位置传感器来获取转子角度信息,但传感器不仅增加了系统成本,还可能因为传感器故障而导致系统故障。
为了解决这个问题,研究人员提出了无传感器矢量控制方法,其中一种常用的方法是利用滑模观测器(Sliding Mode Observer,简称SMO)来估算转子角度。SMO通过观测电机的永磁体磁链和绕组电流,推测出转子角度信息,并作为控制器的输入。然而,传统的SMO方法存在一些问题,例如带载转速抖动和低转速下的转速估算精度不高。
为了克服这些问题,本文提出了一种基于转子磁链模型的改进SMO滑模观测器。该观测器结合了传统SMO的优势,同时针对其缺点进行了改进。首先,通过建立永磁同步电机转子磁链模型,可以更准确地估算转子角度。其次,通过引入滑模控制器,可以有效解决传统SMO观测器的带载转速抖动问题。再次,通过改进反电动势估算方法,可以提高低转速下的转速估算精度。最后,通过实验验证和仿真分析,验证了改进SMO滑模观测器在PMSM无传感器矢量控制中的有效性和可行性。
基于转子磁链模型的改进SMO滑模观测器在PMSM无传感器矢量控制中具有高精度的角度观测能力。通过对电机的磁链和绕组电流进行观测和推测,可以准确估算出转子角度信息。与传统SMO观测器相比,改进SMO滑模观测器不仅具有更高的角度观测精度和更小的误差,还可以有效解决带载转速抖动和低转速下转速估算精度低的问题。此外,改进SMO滑模观测器还可以实现电机转向切换时的精确角度估算。
综上所述,基于转子磁链模型的改进SMO滑模观测器是一种可行且有效的无传感器矢量控制方法。通过该方法,可以实现PMSM永磁同步电机的精确控制,提高系统的稳定性和控制精度。未来的研究可以进一步优化改进SMO滑模观测器的算法和控制策略,以适应更广泛的应用场景,并进一步提高系统的性能。
相关代码,程序地址:http://imgcs.cn/lanzoun/706394947247.html















 606
606











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









