









文章目录
写在前面:本人能力、时间、技术有限,没有对一些细节进行深入研究和分析,也难免有不足和错误之处,欢迎交流和指正。本人写博客主要是学习过程的记录。
1、前言
滑模变结构控制是进行非线性系统分析与设计的一类普遍的方法,最早由前苏联学者 Vadim Utkin 提出,该方法能够实现系统降阶,同时具有对系统建模不确定性、外部扰动鲁棒性强,易于工程实现的优点。滑模变结构控制方法 是一种特殊的非线性控制,它能够迫使系统按照人为设定的“滑动模态”运动, 且该滑动模态的运动方程仅取决于所选择的切换函数,与系统无关。然而, 由于惯性原因,滑模变结构控制系统不可避免的出现抖振问题,如何有效削弱抖振现象成为当前的研究热点。
2、滑膜变结构基本原理
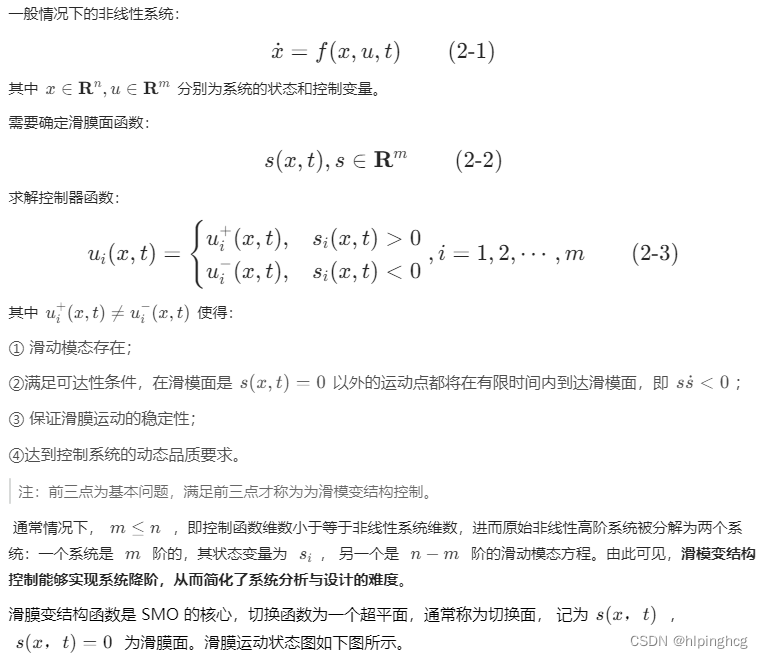
通常滑膜运动包括两部分:第一部分为趋近运动阶段;第二部分为滑膜态运动阶段。。趋近过程是从系统任意初始状态趋向滑模面,直到有限次地穿越滑模切换面的过程;滑动过程是系统状态在滑模面上趋向平衡点运动的过程。
3、传统二阶滑模观测器原理分析


4、全阶滑膜观测器原理分析


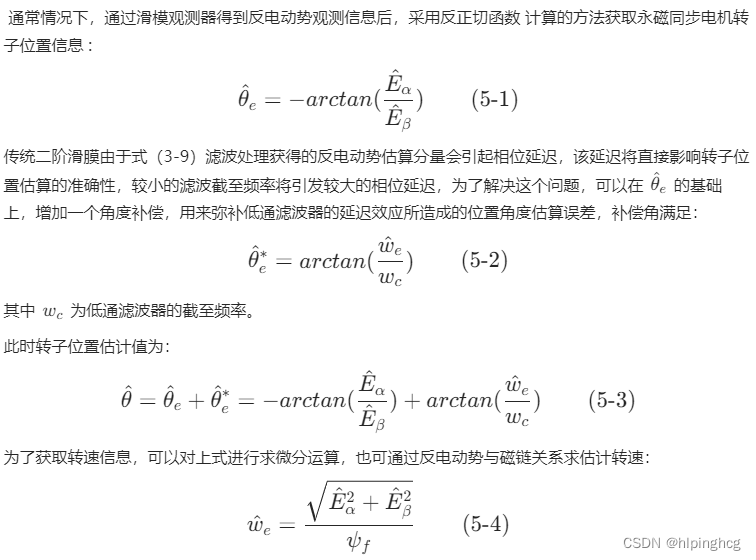
5、传统二阶滑膜控制器基于反正切的转子位置估计
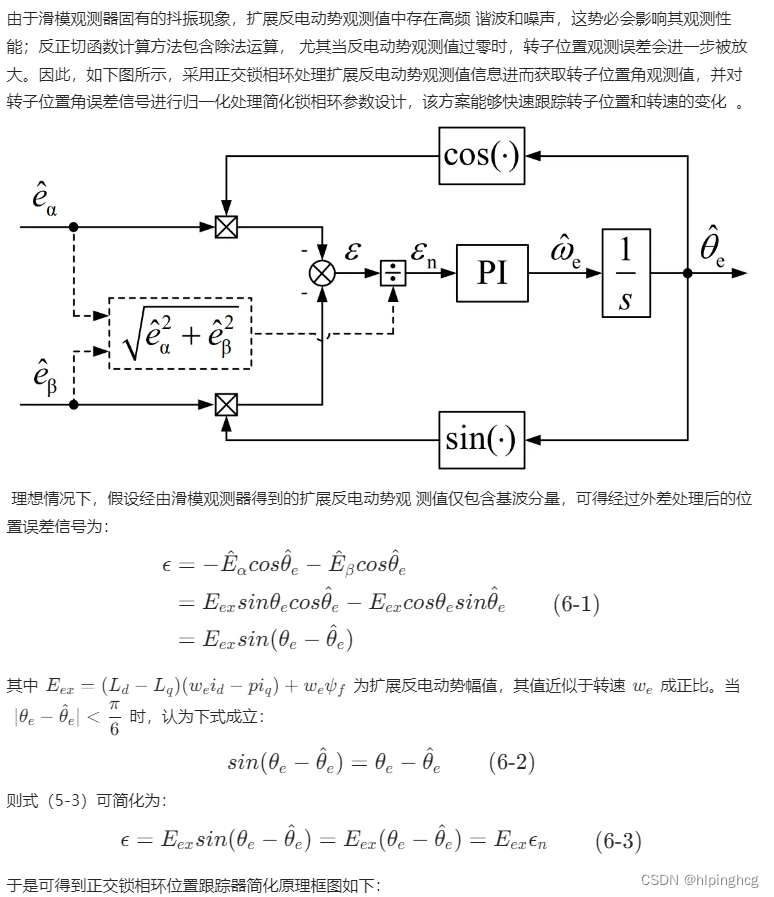
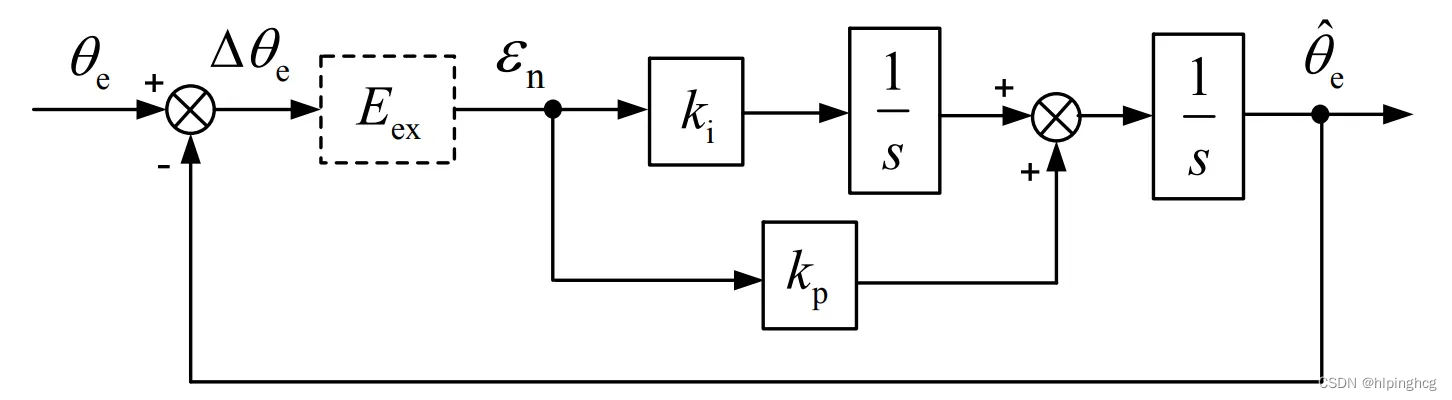
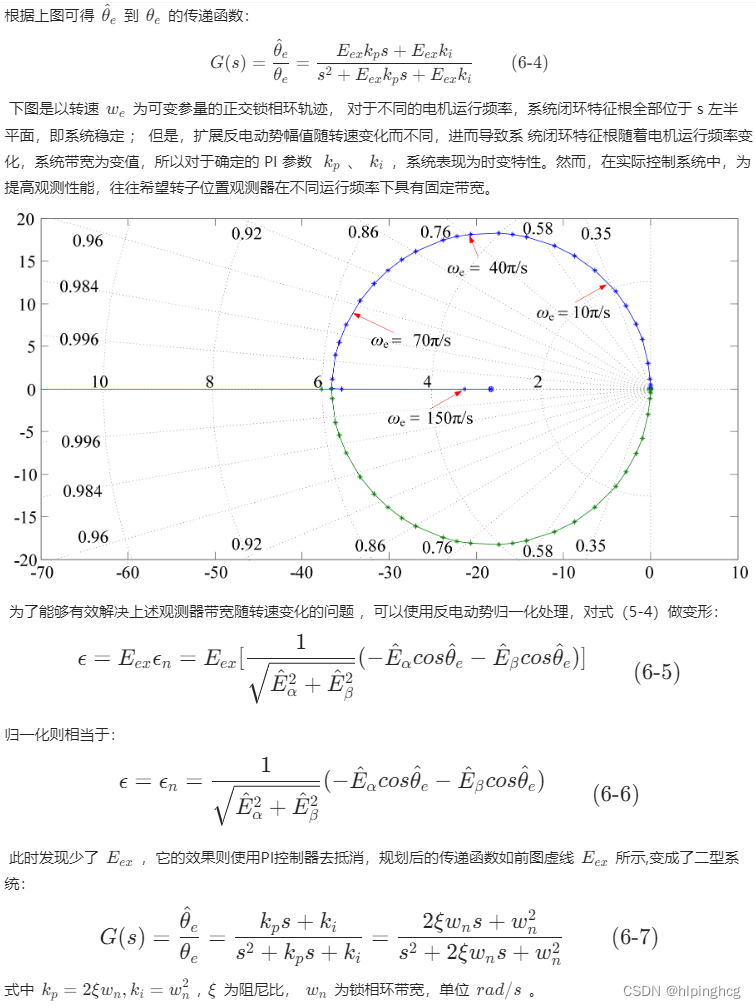
6、 基于正交锁相环位置观测
7、全阶滑膜观测器仿真
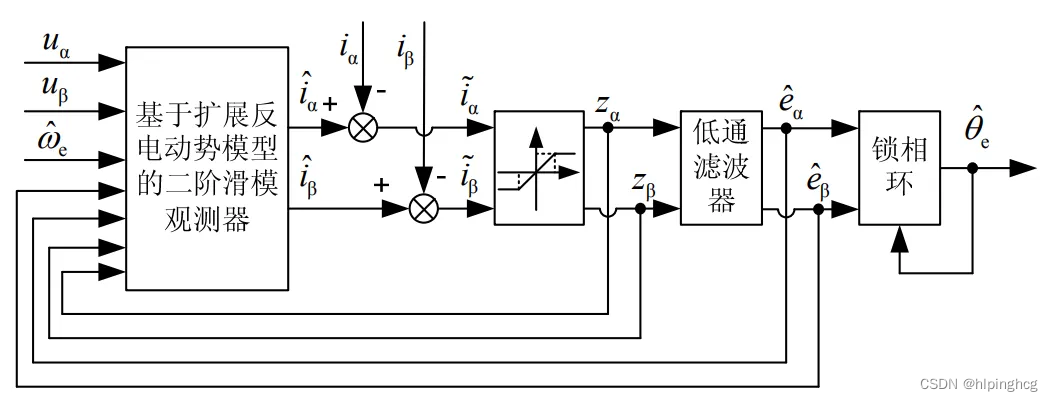
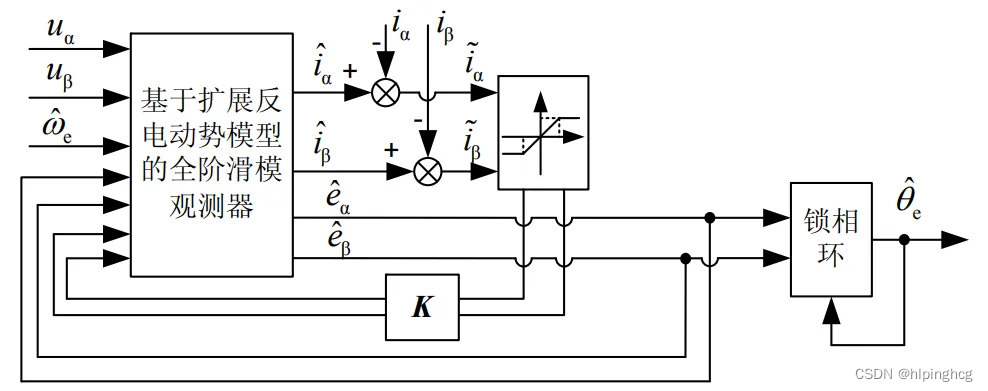
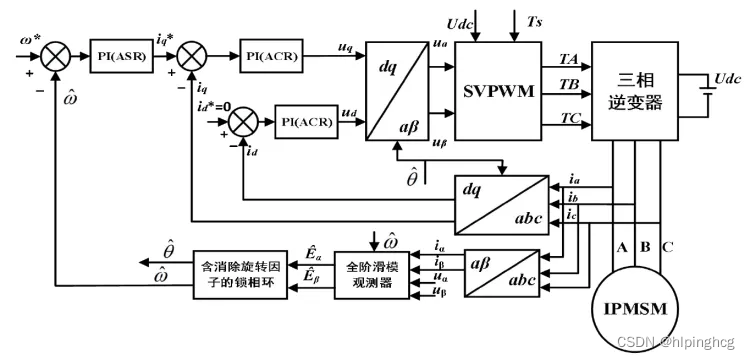
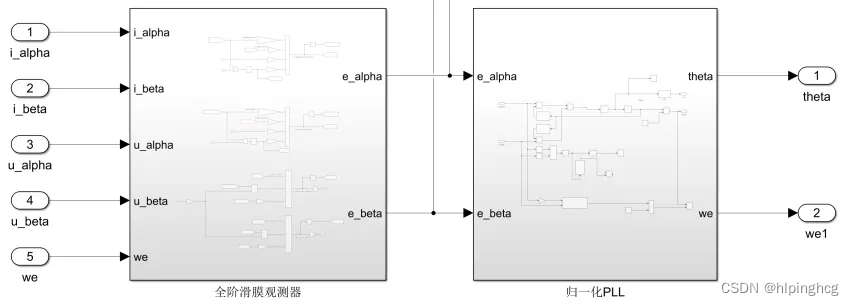
PMSM全阶滑膜观测器控制框图如下图所示:
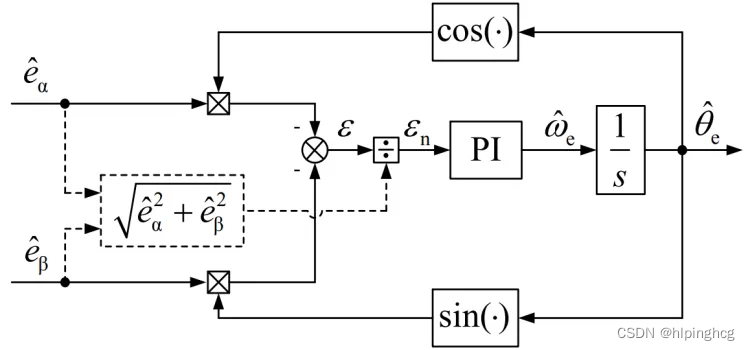
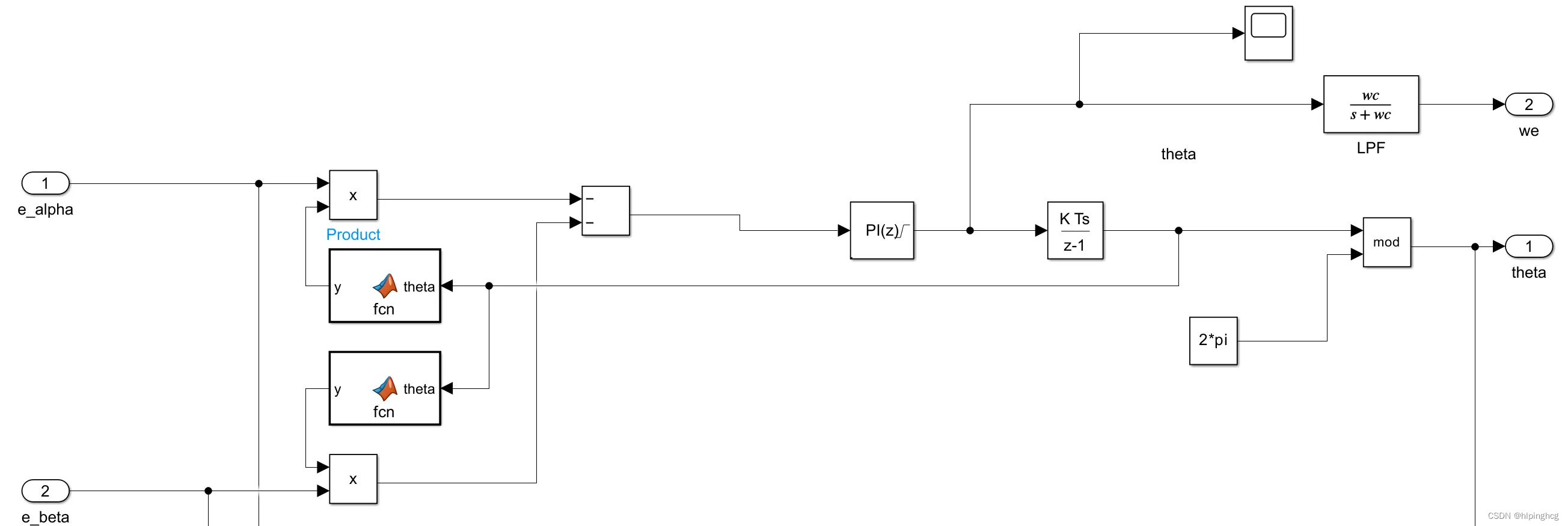
其中含消除旋转因子的锁相环如下图所示:
7.1 电机及系统参数
Ts=0.0001;
Pn=4;
Rs=0.055;
Ls=0.21e-3;
flux=0.007797;
J=0.053e-4;
B=0;
fx=0;
Udc=24;
CurrKp=0.34558;
CurrKi=90.5078;
spd_kp=0.018643;
spd_ki=03.0679;
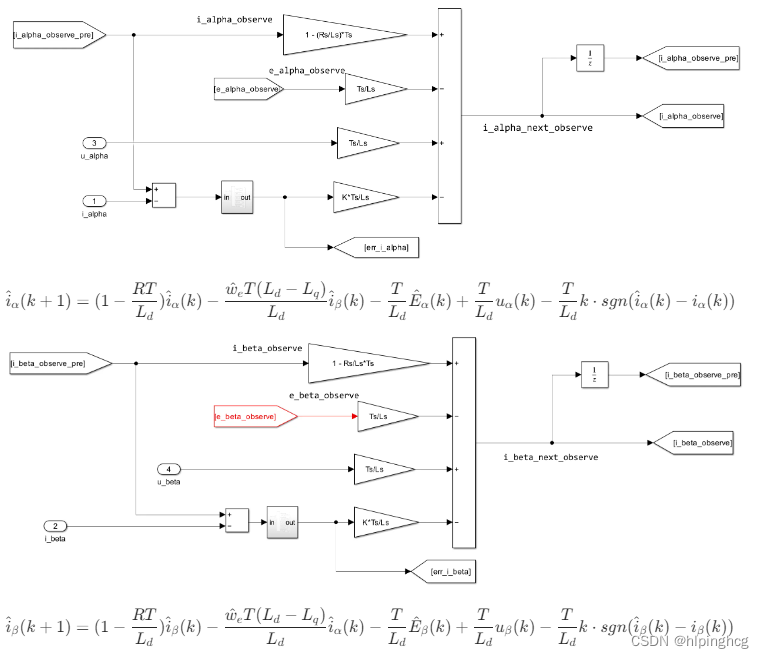
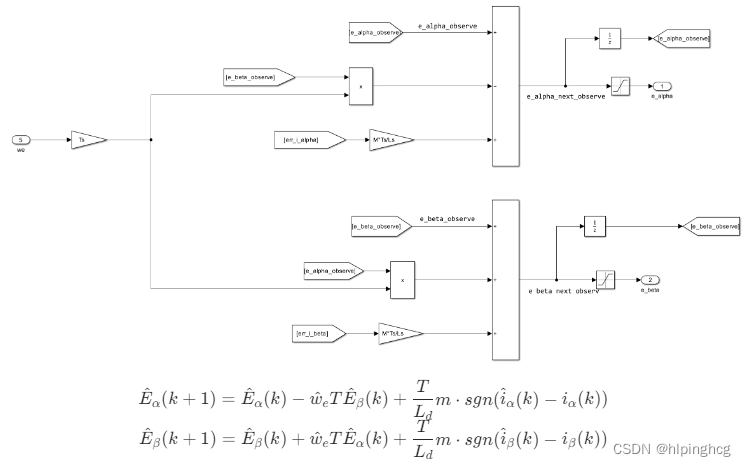
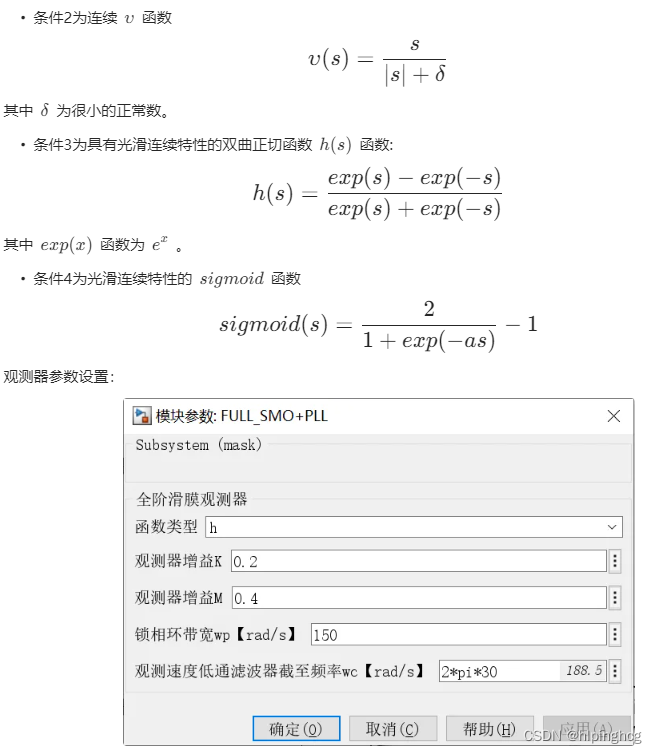
7.2 全阶滑膜观测器核心模块
模型下载地址:永磁同步电机无感FOC滑膜观测器(SMO)simulink仿真模型
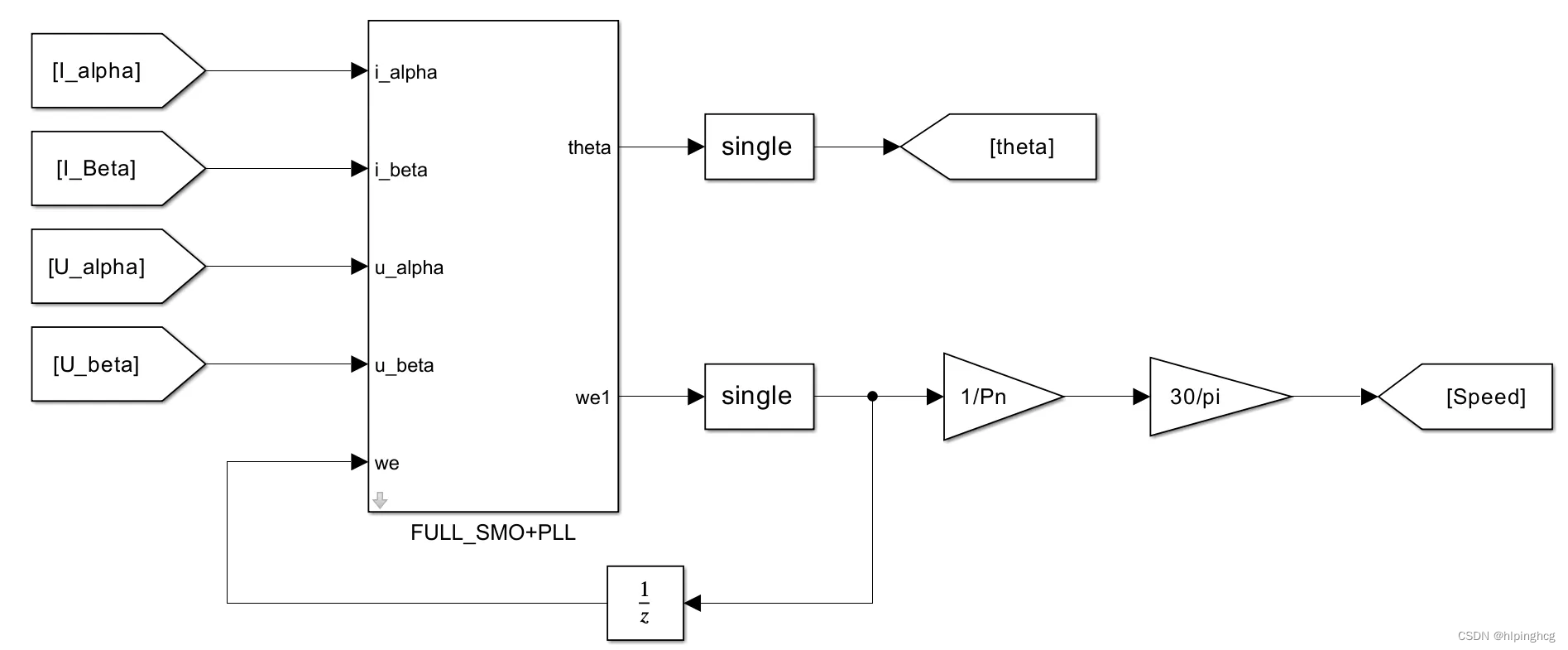
FULL_SMO+PLL内部封装:
全阶滑膜观测器子模块:
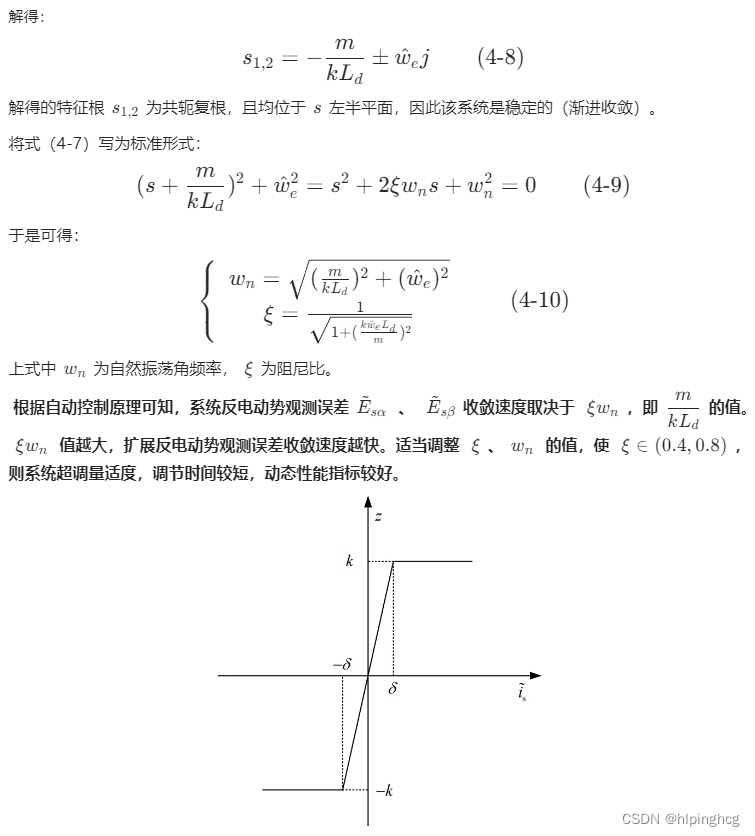
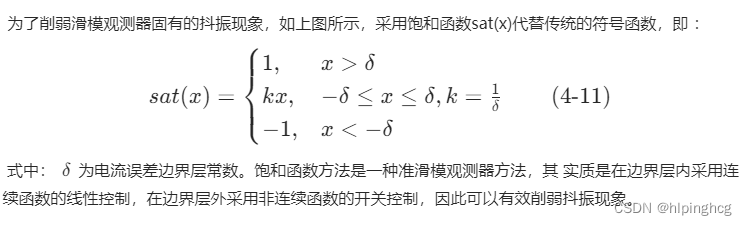
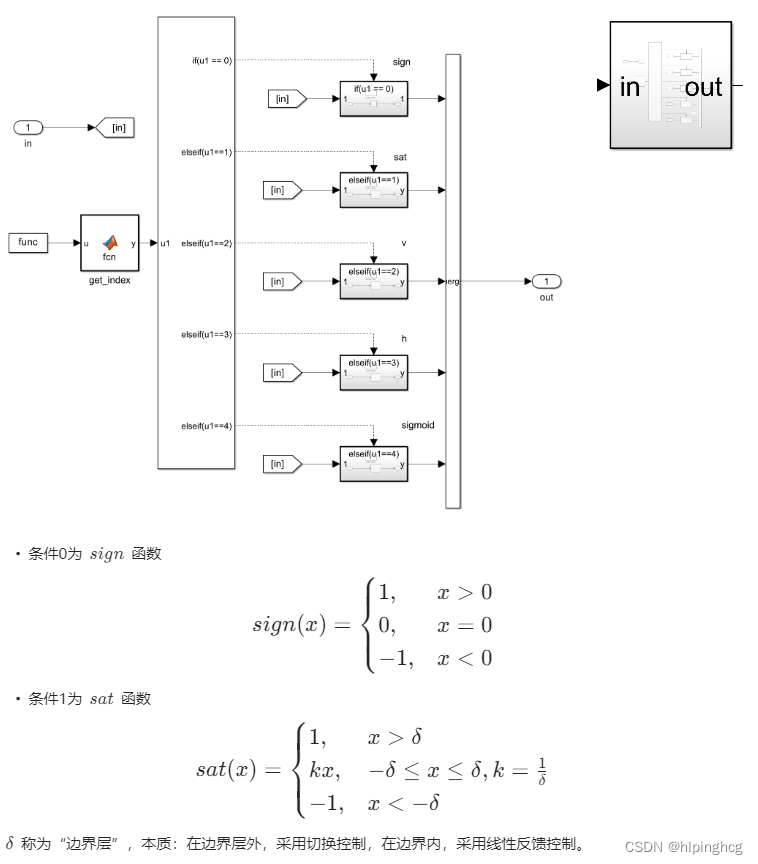
其中符号函数切换模块:
锁相环模块
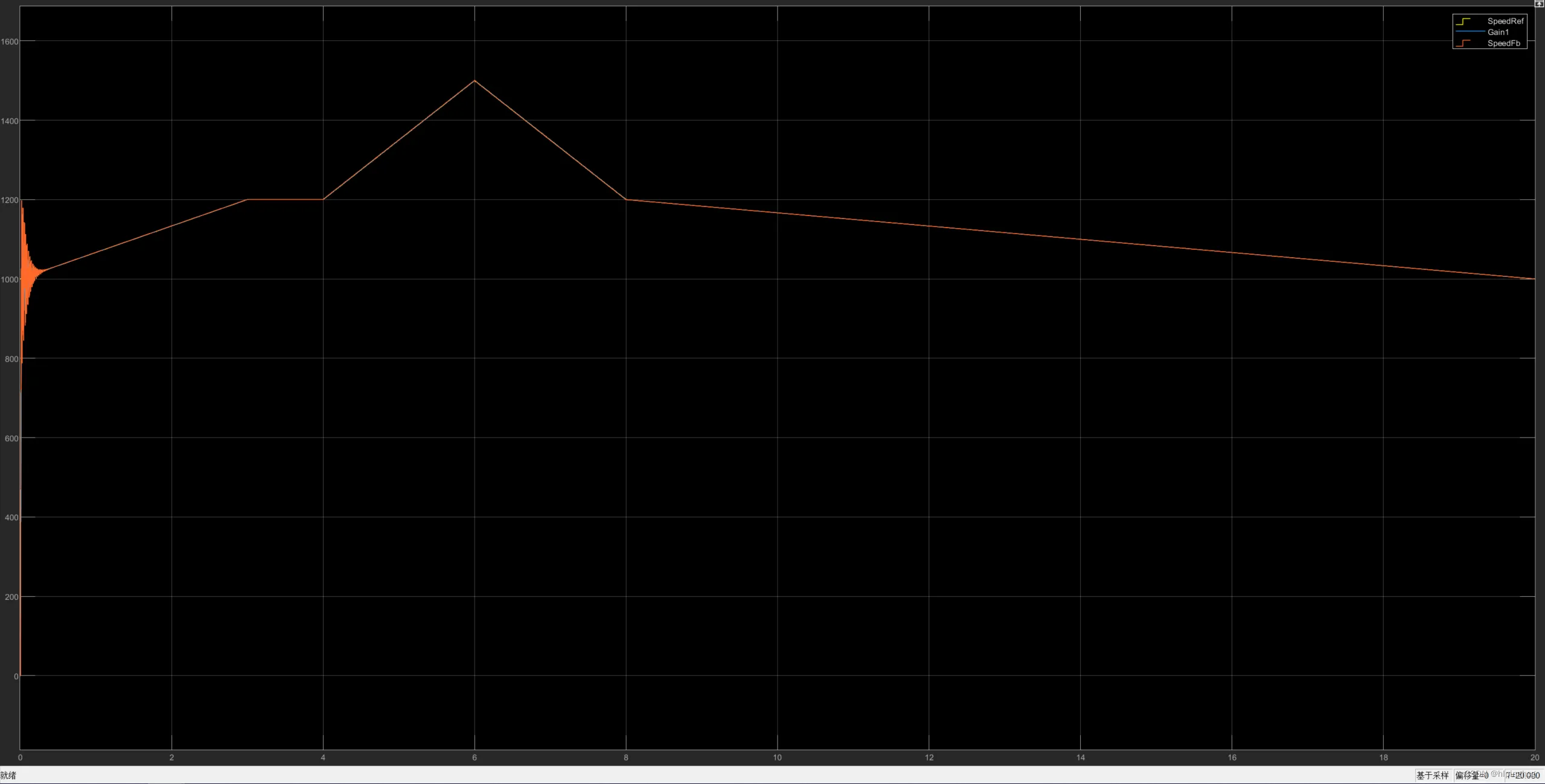
7.3 仿真效果
双曲正切函数tanh函数
sign和sat函数
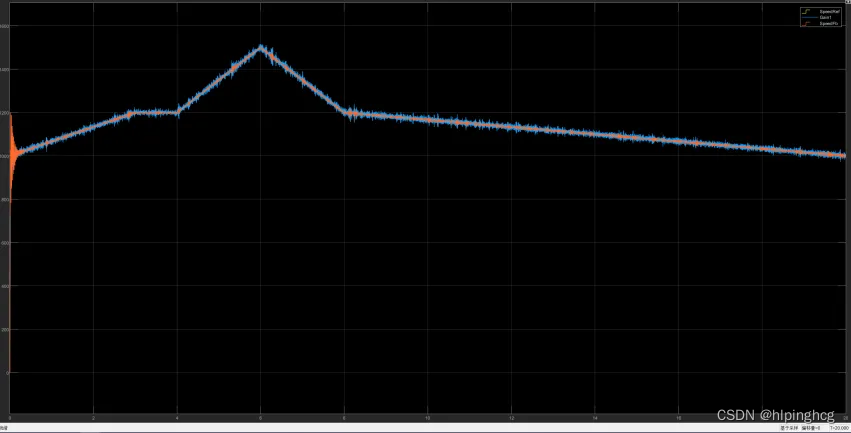
角度波形(观测角度及反馈角度)
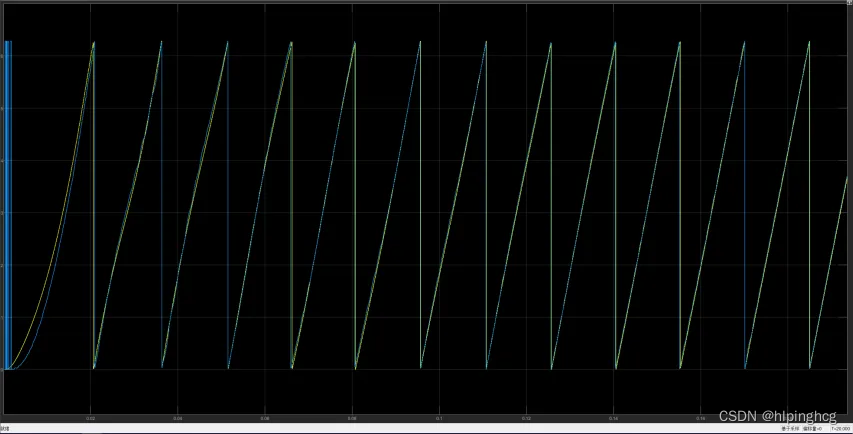
总结:不同的函数有不同的效果,速度太低会出现振荡效果。
参考
参考
【1】张国强. 基于全阶滑模观测器的IPMSM无位置传感器控制策略研究[D].哈尔滨工业大学,2014.
【2】孙元杰. 基于全阶滑模观测器的IPMSM无位置传感器控制策略研究[D].曲阜师范大学,2022.DOI:10.27267/d.cnki.gqfsu.2021.001173.
【3】彻底吃透滑模观测器(PMSM无感算法)(理论精讲+推导+算法+调参+硬件运行):
https://zhuanlan.zhihu.com/p/416224632
【4】整体撸一遍PMSM的滑模观测器(SMO)公式+模型+代码:
https://blog.csdn.net/sy243772901/article/details/131270372
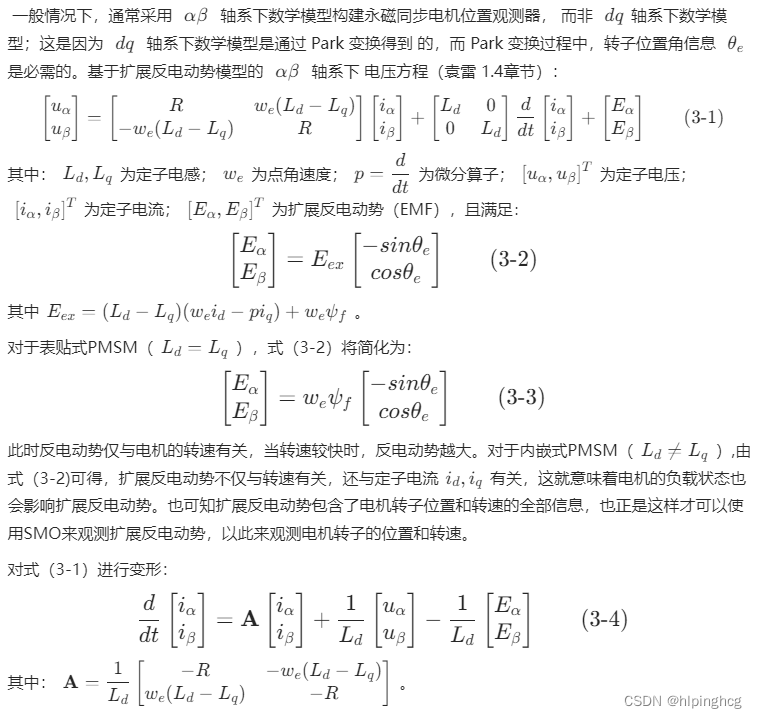
【5】现代永磁同步电机控制原理及MATLAB仿真 袁雷



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











