







一.将传统的BA分成了两大部分:Local BA和 Global BA
Local BA:
优化的是临时滑动窗口内的状态,该临时滑动窗口只包含最近的帧和点,Local BA的主要目的是减少累积误差并且尽可能快的扩张地图。该Local BA的代价函数为: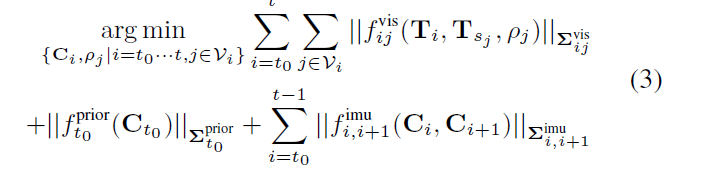
该公式中t0=t-n+1是滑动窗口中的第一帧,n是滑动窗口的大小,Vi表示在帧i中追踪点集
Global BA:
与Local BA在一个相当低的频率下并行运行,GlobalBA优化的是从局部滑动窗口中移除但是在全局地图中被选为关键帧的帧,在全局BA中一个帧被选做关键帧的条件是它携带的未被其他帧观测到的特征点超过N个(在论文中N被选择为20)Global BA的代价函数为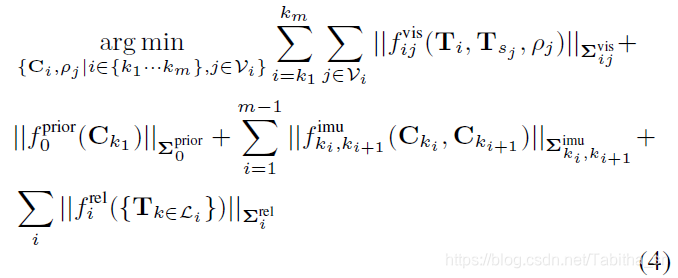
Li是相对位姿约束中特征点的点集
二.相对边缘化:
引起了局部BA中上一关键帧和从局部BA中移除的最新一帧之间的相对位姿约束因此该约束获得了了来自全局BA的约束可以帮助巩固局部BA的相机位姿防止由漂移产生的累计误差
Incremental BA-IBA:
使用在全局BA对于大多数没有共同点的关键帧之间可以大大加速全局BA,但是对于局部BA因为大多数的帧之间在滑动窗口中共享大量的点该IBA便不适用,因此我们提出了一个Improved Incremental BA:ST-IBA来加强局部BA中的舒尔补问题主要思想就是将原本很长的一段追踪特征点划分为几个子追踪特征点 sub-tracks,这种Sub-tracks也包括在局部BA中的关键帧
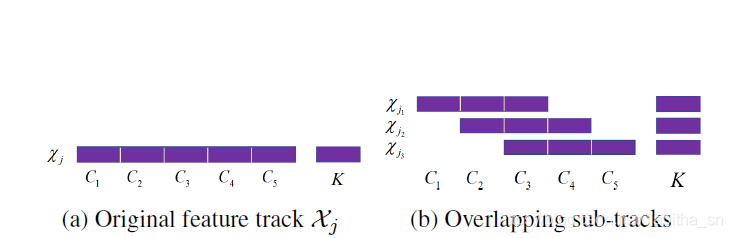
该sub-track 的过程只应用在舒尔补的更新中,这种方法使得最终的速度没有衰减比原本的IBA快了2-10倍的速度并且没有任何精度的损失
三.更新了PCG算法->I-PCG
四.Relative Marginalization:
当在局部BA的滑动窗口中帧的数量超过阈值时那么在滑动窗口中最早的那一帧t0需要被消除,边缘化将该被消除帧所携带的信息转化为对于剩余变量的先验信息
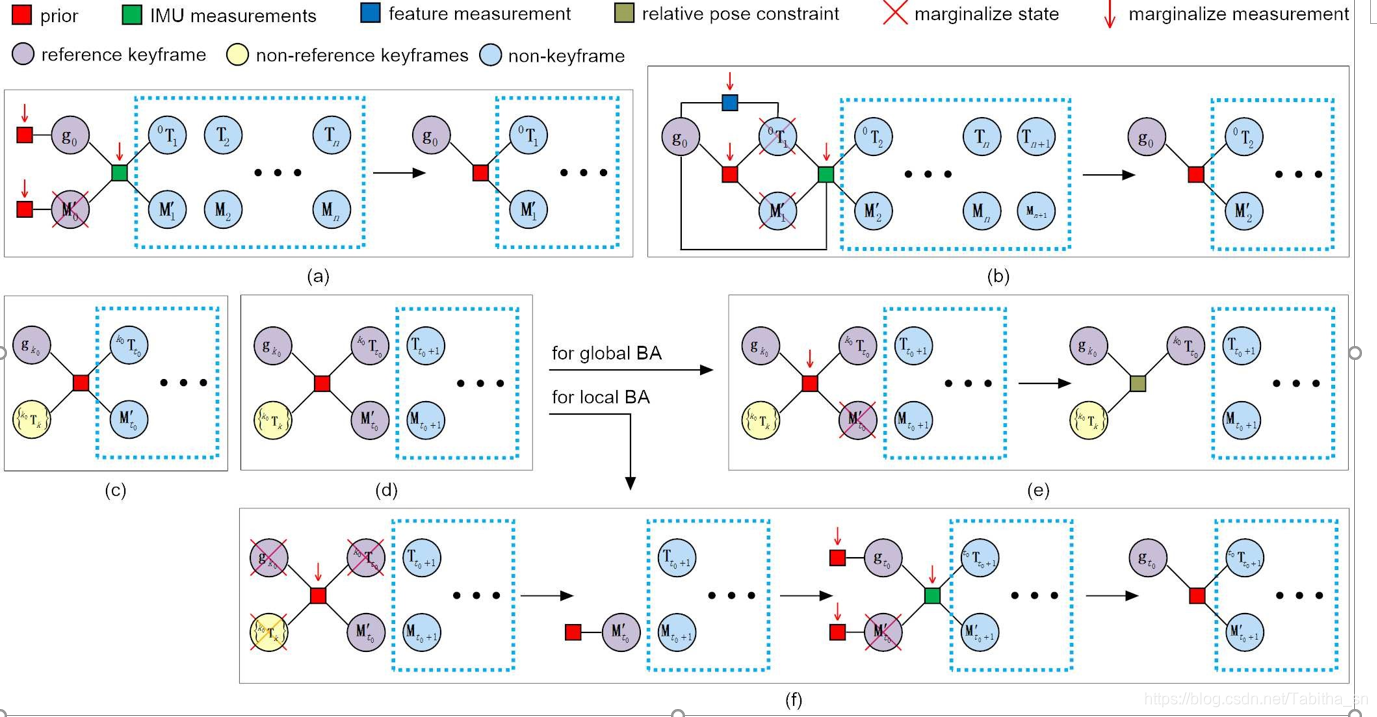
但是在VI-SLAM中累积的误差会导致边缘化产生的先验信息失效,这种在滑动窗口中产生的失效先验信息最终会出发全局地图和回环约束导致全局精度降低,为了防止这一现象的产生文章中保证了在所提出的相对边缘化中,边缘化先验信息和全局BA之间的一致性,主要思想:规划参考关键帧坐标系中的先验信息而不是全局坐标系中的与视觉SLAM中的相对BA类似。

















 4016
4016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









