







 本文深入探讨了大型仿人机器人整机构型的研究现状,包括国内外的技术进展,如WABIAN-2R、LOLA、DRC-HUBO、DURUS和Digit等机器人的设计特点。重点阐述了关节运动特点、伺服驱动器、减速器和仿真平台,强调整机构型对机器人性能的影响,如减轻重量、减少惯量和增加弹性机构以提升运动性能。此外,文中提及优必选的Walker机器人,并预测未来发展趋势将涉及伺服驱动器与整机构型的融合设计、弹性元件的引入和仿生学的应用。
本文深入探讨了大型仿人机器人整机构型的研究现状,包括国内外的技术进展,如WABIAN-2R、LOLA、DRC-HUBO、DURUS和Digit等机器人的设计特点。重点阐述了关节运动特点、伺服驱动器、减速器和仿真平台,强调整机构型对机器人性能的影响,如减轻重量、减少惯量和增加弹性机构以提升运动性能。此外,文中提及优必选的Walker机器人,并预测未来发展趋势将涉及伺服驱动器与整机构型的融合设计、弹性元件的引入和仿生学的应用。
本文从大型仿人机器人整机构型国内外研究现状入手,围绕机器人整机构型、关节运动特点、伺服驱动器、减速器、仿真平台等方面进行深度讲解,最后讲述了大型仿人机器人整机构型未来发展趋势。
大型仿人机器人整机构型研究现状
① 大型仿人机器人机械概述
仿人机器人主要由三大部分组成:机械部分、控制部分及传感部分。机械部分是其他部分的基础,就像建大楼一样,它类似于地基或者每个砖块。
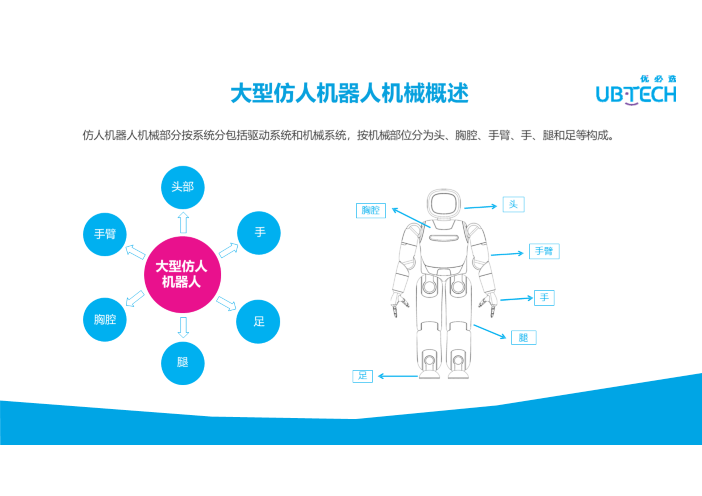
机械部分又可分为两个子系统,一个是驱动系统,另一个是机械系统。驱动可以理解为机器人的关节,怎么让机器人去运动。机械部分是连接关节和关节之间,包括怎么去搭载这些传感器。如果按部位来分,机器人可以分为头、胸腔、手臂、手、腿和足部等,上图展示的是Walker机器人的外观图。
机械部分关键之一是关节的数量和关节的位置分布。无论是关节的数量,还是布置方式,都与整个机器人构型密切相关。我们知道人体有206块骨头,大的关节有78个,主要的关节类型有6种。仿人机器人是模拟人类关节和骨骼的架构的机器人,通常它有15-70个关节,关节的类型通常有三种,这三种主要包括一个是前向,一个是侧摆,还有一个是旋转。现有的仿人机器人通常头部一般有1-3个自由度,就是1-3个关节,手臂一般是4-7个关节,人的手有21个关节,仿人机器人手通常是2-13个关节点居多,仿人机器人腿部一般是6-7个关节,使用6个关节的多一些。
② 国外研究现状
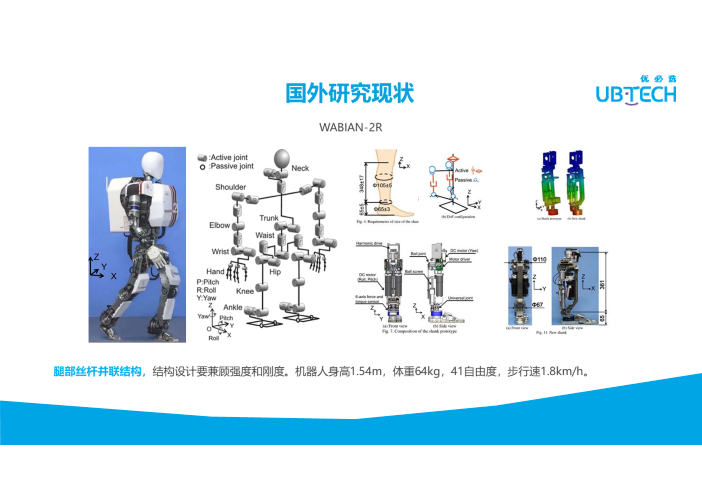
上图展示的是早稻田大学的WABIAN-2R机器人,这个机器人特点在于整个腿部除了正常的6个自由度之外,还有一个自由度是小腿的旋转自由度,这样机器人可以模拟人类走外八的步态,它也可以实现整个机器人的节能。另外,传统机器人的腰部可以分解为三个自由度,但它的腰部放了4个自由度,这样机器人在步态时可以实现直腿的行走。我们看到许多传统机器人,它的膝盖是弯曲的,是屈膝行走,还有它的小腿采用丝杆并联结构。
在整个机器人的设计过程中,除了关注于整个腿部结构的强度外还要关注刚度。WABIAN-2R机器人的最快的步行速度是1.8km/h。另外,它的足部也做了一些创新,它的脚分为前后脚掌,脚部不是一体的,之间增加了一个被动的关节,通过这样的设计可以实现节能64%。另外,脚分为前后脚掌之后,可以实现原地的转向。
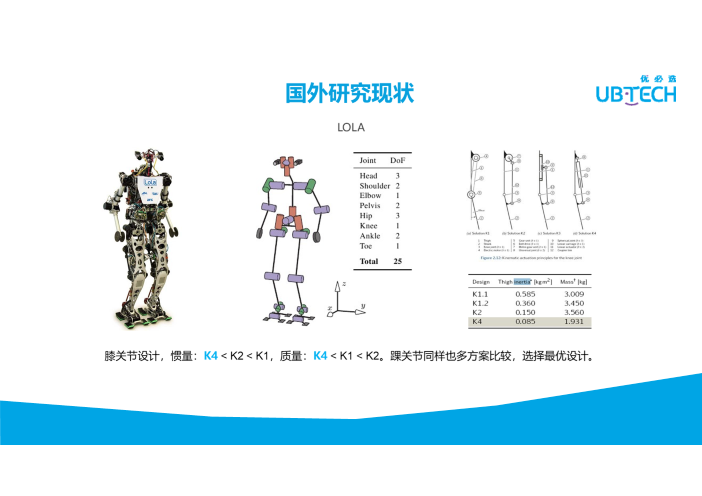
第2个是来自慕尼黑工业大学的LOLA机器人,LOLA机器人在大腿上做了4种设计,然后根据设计目标:整个惯量最小、质量最轻,最终选了k4方案,另外在小腿上它也做了多个方案,最终比较选一个最优的方案。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 224
224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









