






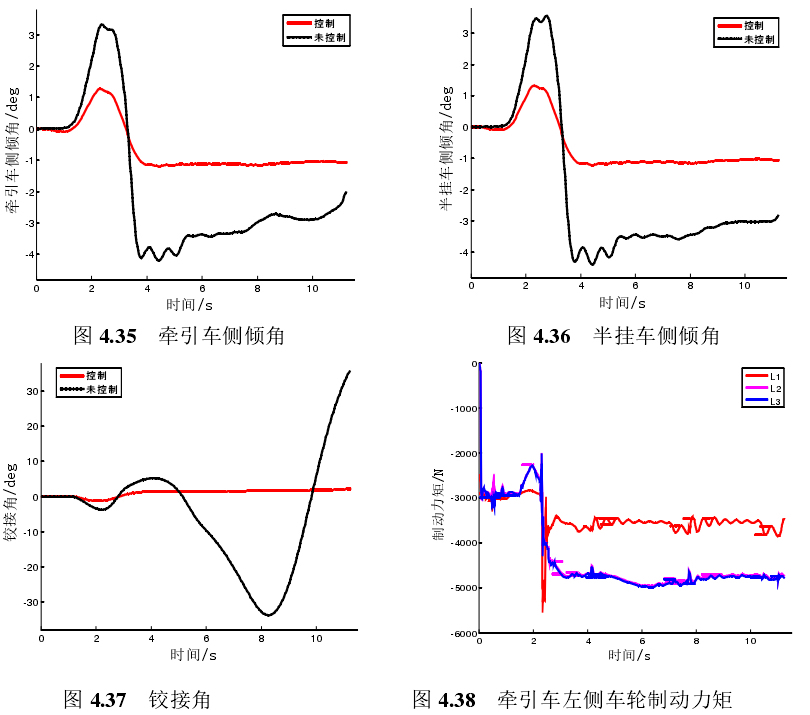
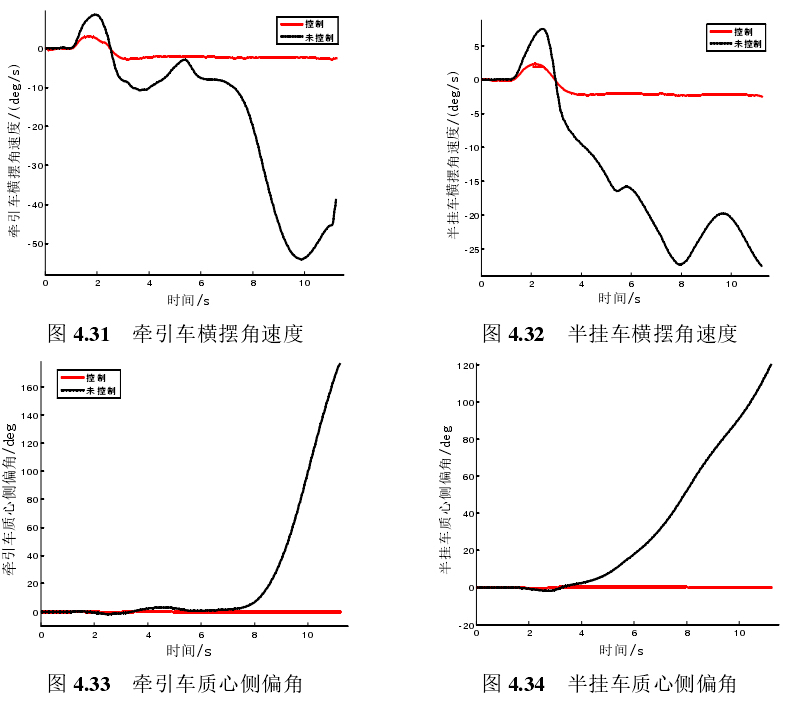
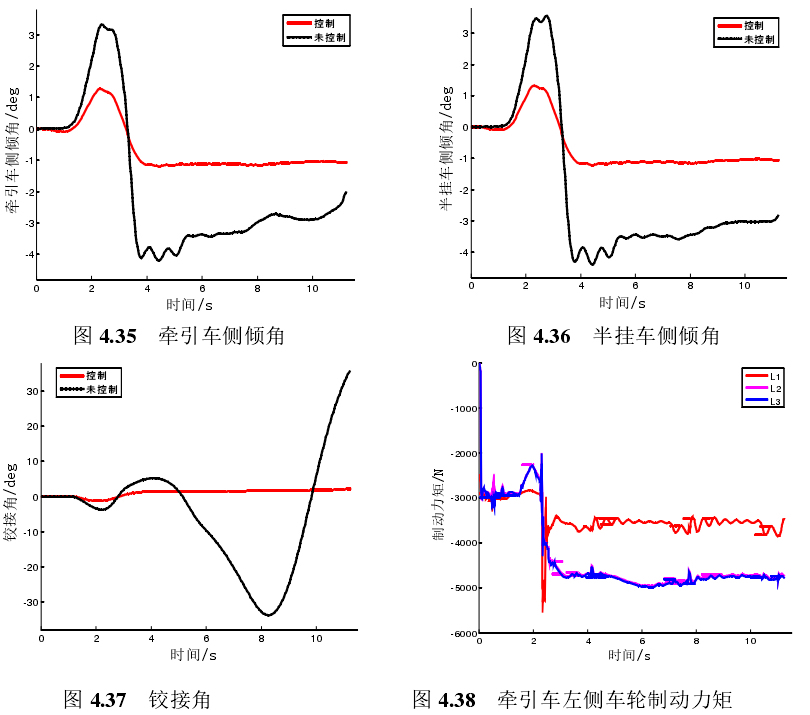
半挂汽车列车4自由度6轴整车model,横向稳定性控制,在低附着系数路面,进行典型3个工况,角阶跃,双移线,方向盘转角。
采用算法:模糊PID,制动力矩分配,最优滑移率滑膜控制。
以上基于trucksim和simulink联合仿真,有对应 p-a-p-e-r参考
YID:35499677679934524
飞***翼
半挂汽车列车4自由度6轴整车模型是一种常见的车辆控制研究工具,主要用于研究半挂汽车列车在低附着系数路面下的横向稳定性控制。本文将从算法设计、仿真实验和结果分析等方面,对该模型的相关研究进行探讨。
在半挂汽车列车的横向稳定性控制中,模糊PID算法是一种常用的控制策略。该算法结合了模糊控制和PID控制的特点,能够在面对复杂的工况时保持良好的控制性能。具体而言,模糊PID算法通过模糊化处理车辆状态和误差信号,然后根据模糊规则库进行推理,最终得到合适的PID参数进行控制。通过该算法,半挂汽车列车可以在不同的工况下保持较好的横向稳定性。
此外,在半挂汽车列车的横向稳定性控制中,制动力矩分配和最优滑移率滑膜控制也是常用的控制策略。制动力矩分配是通过对车辆的制动系统进行合理的力矩分配,实现对车辆横向稳定性的控制。最优滑移率滑膜控制则是在车辆制动过程中,通过控制制动力矩的大小和滑膜的湿度来控制车轮的滑移率,从而提高车辆在低附着系数路面下的横向稳定性。
为了验证以上算法的有效性,我们采用了trucksim和simulink联合仿真平台进行了实验。该仿真平台结合了车辆动力学和控制系统的仿真功能,能够较为真实地模拟半挂汽车列车在不同工况下的运动过程。通过在仿真平台上构建半挂汽车列车4自由度6轴整车模型,并应用上述算法进行控制,我们可以得到相应的仿真结果。
在实验过程中,我们选择了典型的3个工况,即角阶跃、双移线和方向盘转角。通过对这些工况的仿真实验,我们可以评估算法对不同情况下半挂汽车列车横向稳定性的控制效果。同时,我们还对仿真结果进行了详细的分析和讨论,揭示了算法设计中的优势和不足之处,并提出了改进的方向。
需要说明的是,本文所述的研究
以上相关代码,程序地址:http://matup.cn/677679934524.html















 720
720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









