






A*算法路径规划 A星Matlab路径规划 自定义栅格
可自行更改绘制栅格地图,自定义起始点目标点位置、未知障碍物位置
matlab实现
详细注释!
ID:235718033166660
马三拉蒂
A算法是一种常用于路径规划的启发式搜索算法,它能够在栅格地图上找到最优的路径。在这篇文章中,我们将使用Matlab来实现A算法,并介绍如何自定义栅格地图、起始点和目标点的位置以及未知障碍物的位置。我们将详细注释我们的代码,以帮助读者理解算法的实现原理。
首先,让我们来了解一下A算法的原理。A算法是一种基于启发式函数的搜索算法,它综合考虑了每个节点的代价和启发函数的估计值,以选择最优的路径。在路径规划中,A*算法将栅格地图划分为一个个的网格,每个网格可以是自由通行的区域或者障碍物。我们的目标是找到从起始点到目标点的最短路径,避开障碍物。
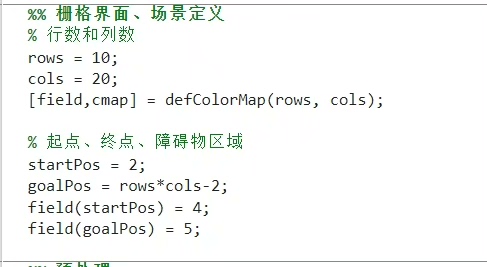
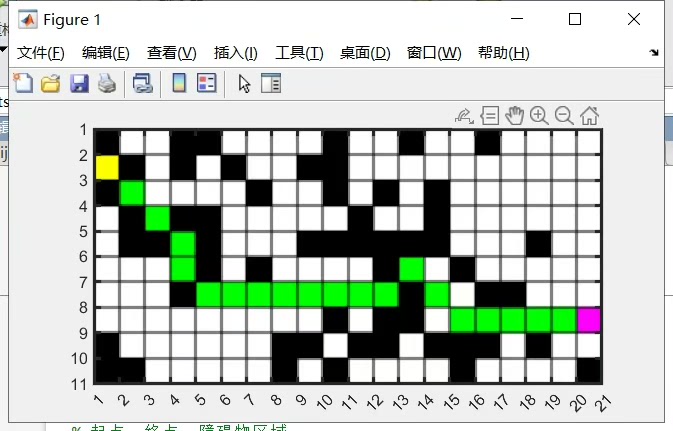
在Matlab中,我们可以使用图像处理工具箱来绘制和编辑栅格地图。首先,我们需要定义一个网格矩阵来表示栅格地图,其中每个元素代表一个网格的状态。一般情况下,我们可以用0表示自由通行的区域,用1表示障碍物。通过设置矩阵中的元素,我们可以自定义栅格地图的形状和障碍物的位置。
接下来,我们需要定义起始点和目标点的位置。起始点是路径规划的起点,目标点是路径规划的终点。在栅格地图上,我们可以用坐标来表示起始点和目标点的位置。通过设置起始点和目标点的坐标,我们可以确定路径规划的起点和终点。
在A*算法中,我们需要计算每个节点的代价和启发函数的估计值。节点的代价可以通过计算从起始点到当前节点的实际代价来获得,启发函数的估计值可以通过计算当前节点到目标点的估计代价来获得。通过综合考虑每个节点的代价和启发函数的估计值,我们可以选择最优的节点来扩展搜索。
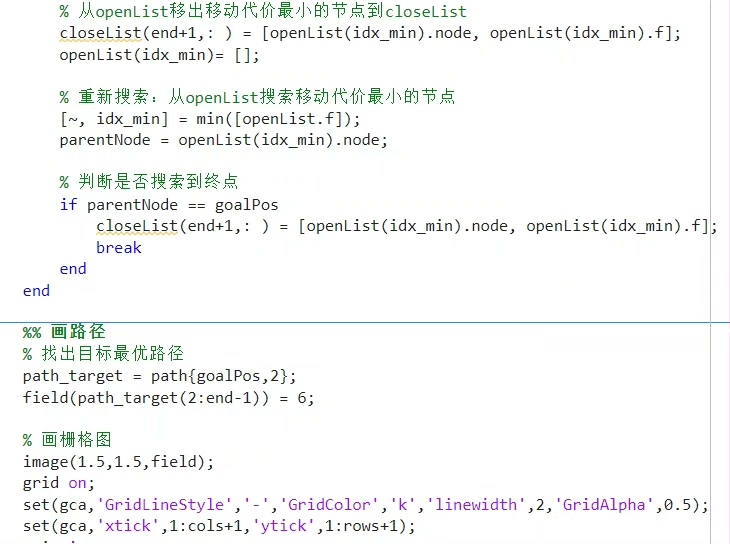
在Matlab中,我们可以使用循环和条件语句来实现A*算法。我们首先初始化起始节点的代价和启发函数的估计值,然后将起始节点加入到待扩展列表中。接下来,我们循环从待扩展列表中选择节点进行扩展,直到找到目标节点或者遍历完所有的节点。在每次扩展节点时,我们需要更新该节点的代价和启发函数的估计值,并将其邻居节点加入待扩展列表中。最终,当找到目标节点时,我们可以通过回溯路径来得到最优路径。
为了帮助读者更好地理解我们的代码,我们将对代码进行详细的注释。通过注释,读者可以清楚地了解每个部分的功能和实现方式。我们会解释每个变量的含义、每个函数的作用以及每个步骤的目的。这样一来,读者可以根据注释来理解我们的代码,并且可以根据自己的需求进行修改和扩展。
总而言之,本文通过介绍A算法的原理和实现方法,以及在Matlab中如何自定义栅格地图、起始点和目标点的位置,帮助读者理解路径规划的基本概念和实现过程。我们通过详细注释我们的代码,使读者能够清楚地了解每个步骤的功能和目的。希望这篇文章能够帮助读者更好地理解A算法,并应用于自己的项目中。
【相关代码,程序地址】:http://fansik.cn/718033166660.html


















 1126
1126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









