






风力发电的变桨距控制代码与1.5MW风机建模数据分析
一、引言
随着可再生能源的日益重要,风力发电已成为全球关注的焦点。其中,变桨距控制是风力发电机组的关键技术之一。本文将深入探讨1.5MW风力发电机的完整建模过程,并就PID控制器与模糊PID控制器的效果进行对比分析。
二、1.5MW风机的完整建模
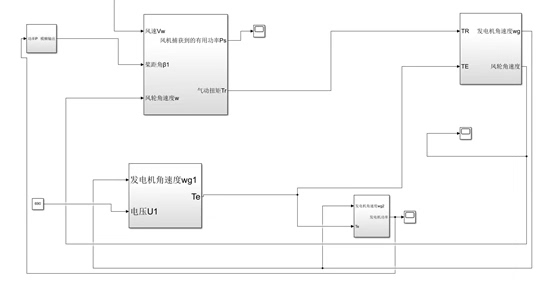
为了更好地理解风力发电的变桨距控制,首先需要建立一个完整的1.5MW风机模型。该模型应包括风力机的气动模型、传动模型、发电机模型以及控制模型等。
- 气动模型:根据贝茨理论和叶素理论,建立风力机的气动性能模型,描述风速与风机捕获功率之间的关系。
- 传动模型:描述风机传动的动力学特性,包括齿轮箱、轴承等部件的力学特性。
- 发电机模型:建立发电机的电磁特性模型,描述风力机将风能转化为电能的过程。
- 控制模型:包括变桨距控制、偏航控制等,用于实现对风力发电机组的控制。
三、变桨距控制代码
变桨距控制是风力发电中的关键技术之一,通过调整风力机叶片的桨距角,实现对风机输出功率的控制。变桨距控制代码通常采用PID或模糊PID等控制算法。
- PID控制器:PID控制器是一种基于误差的反馈控制器,通过比例、积分和微分环节的组合,实现对输出的精确控制。在风力发电的变桨距控制中,PID控制器能够根据风机当前的运行状态和目标功率,调整桨距角,使风机输出功率稳定在设定值。
- 模糊PID控制器:模糊PID控制器结合了模糊控制和PID控制的优点,通过模糊推理对PID参数进行在线调整,提高的鲁棒性。在风力发电的变桨距控制中,模糊PID控制器能够更好地适应风速的波动和变化,使风机在各种工况下都能保持较高的发电效率。
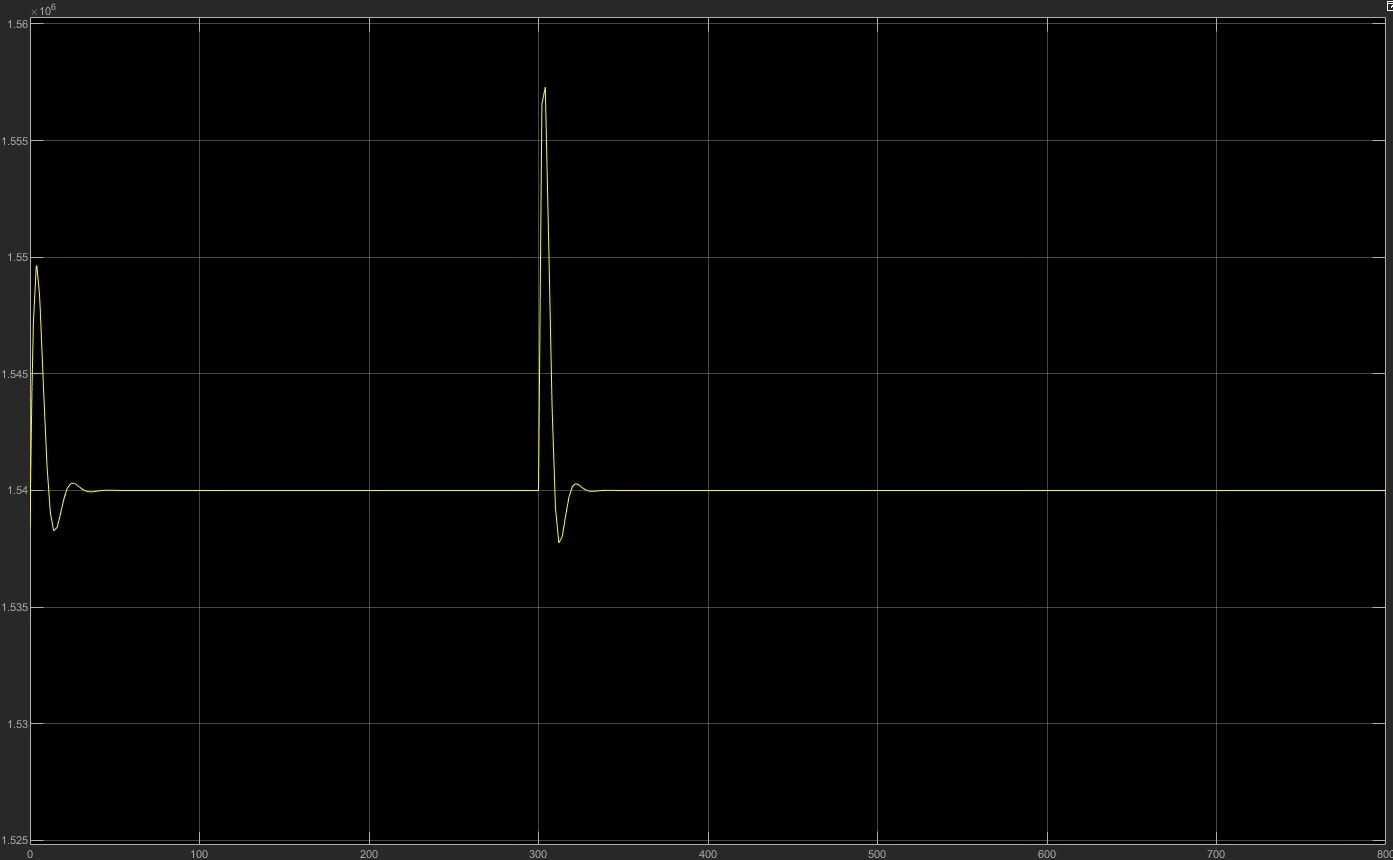
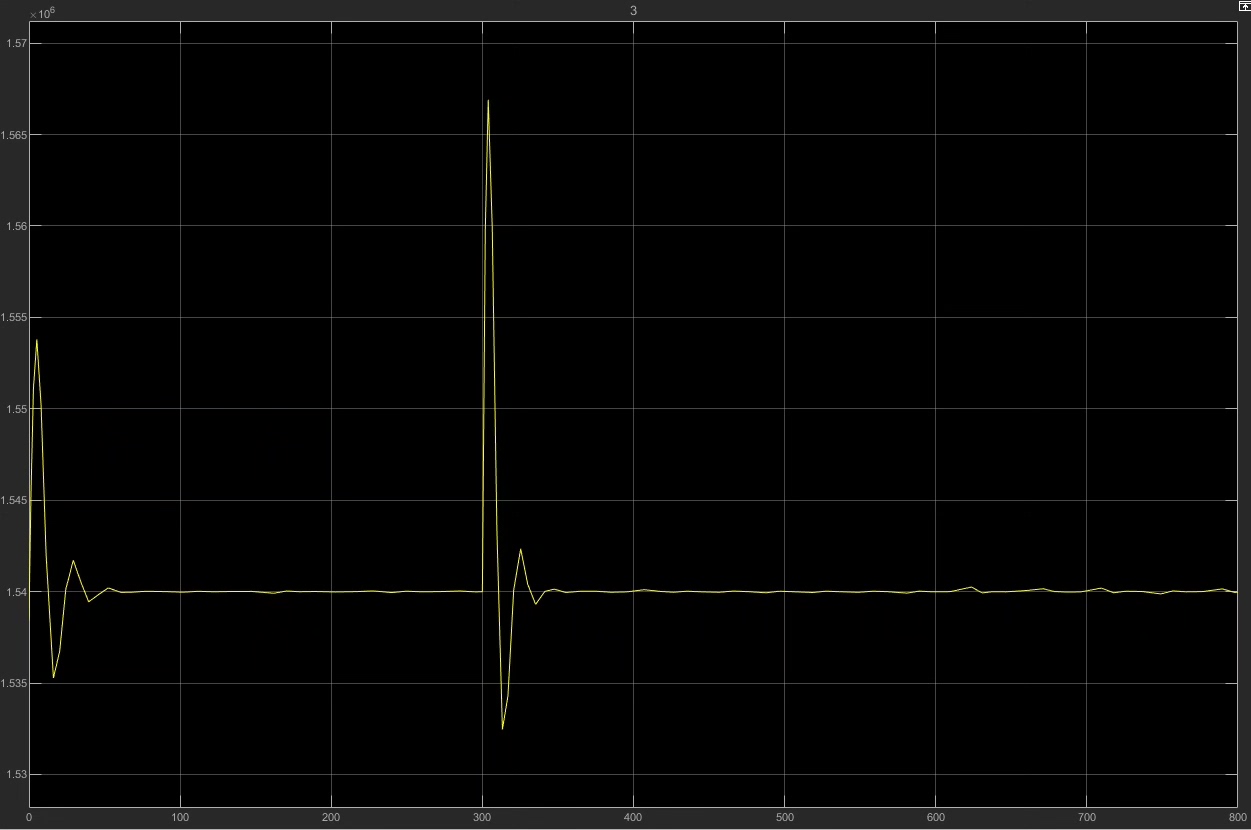
四、PID和模糊PID控制器效果对比
为了比较PID控制器和模糊PID控制器在风力发电变桨距控制中的效果,我们进行了仿真实验。实验结果表:明,在风速稳定的情况下,两种控制器都能实现较好的控制效果。然而,在风速波动较大的情况下,模糊PID控制器表现出更好的鲁棒性和适应性。此外,在实际运行中,模糊PID控制器还能根据风机的实际运行状态和历史数据,自动调整控制参数,进一步提高的性能。
五、结论
本文详细介绍了1.5MW风力发电机的完整建模过程以及变桨距控制的实现方法。通过对比PID控制器和模糊PID控制器在变桨距控制中的效果,我们发现模糊PID控制器在应对风速波动和变化时表现出更好的鲁棒性和适应性。因此,在实际应用中,我们可以根据具体需求选择合适的控制器,以实现风力发电的高效、稳定运行。
风力发电的变桨距控制代码
包含一个1.5MW风机的完整建模和数据
PID和模糊PID控制器效果对比


















 480
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









