









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
2.4 采用无迹卡尔曼滤波对无人机俯仰角、原始角、偏航角进行估计

💥1 概述
【状态估计】卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、库图尔卡尔曼滤波、M-估计、鲁棒立方卡尔曼滤波器实现无人机位置跟踪、迎角和俯仰角跟踪, 方向角度跟踪等研究(Matlab代实现)
📚2 运行结果
2.1 采用扩展卡尔曼滤波的无人机

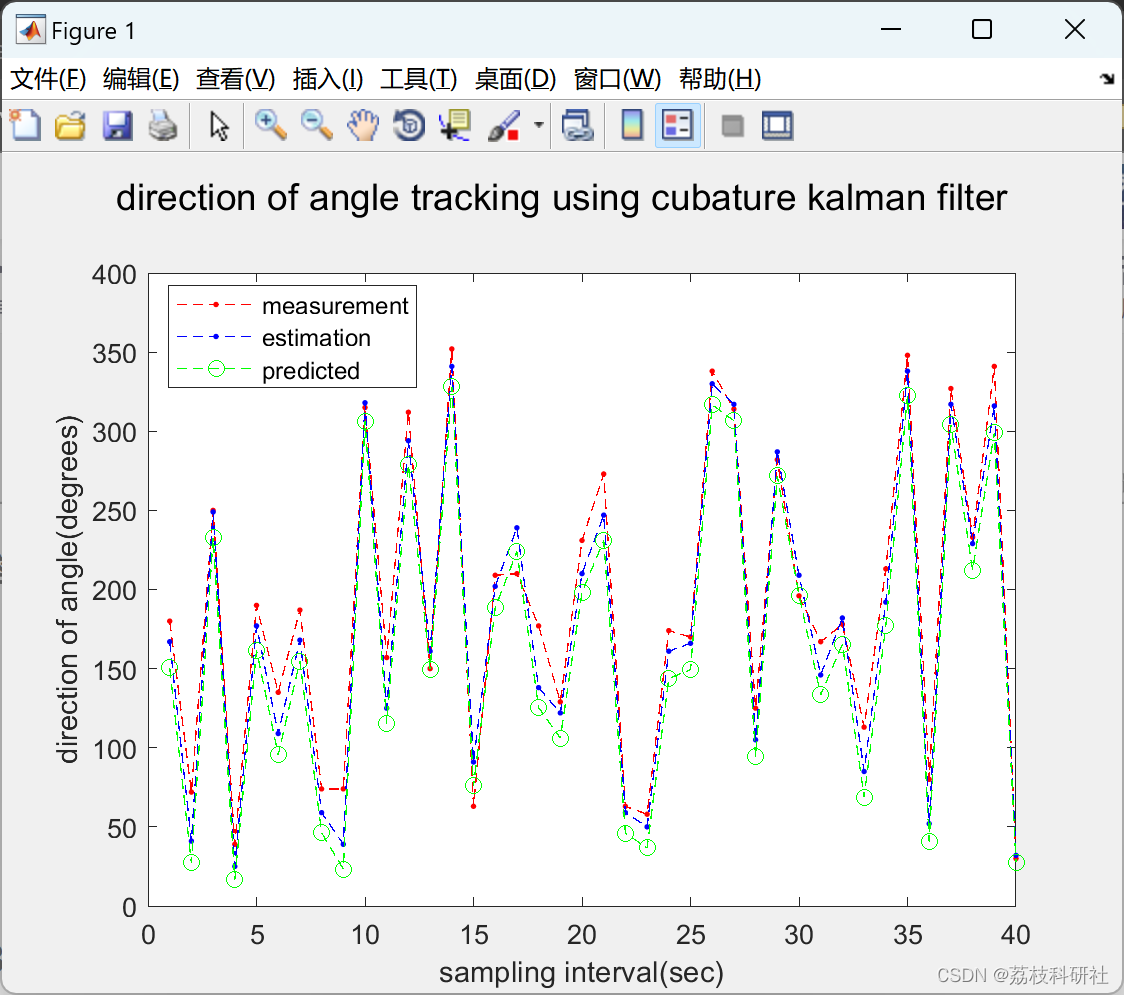
2.2 容积卡尔曼滤波角度跟踪方向
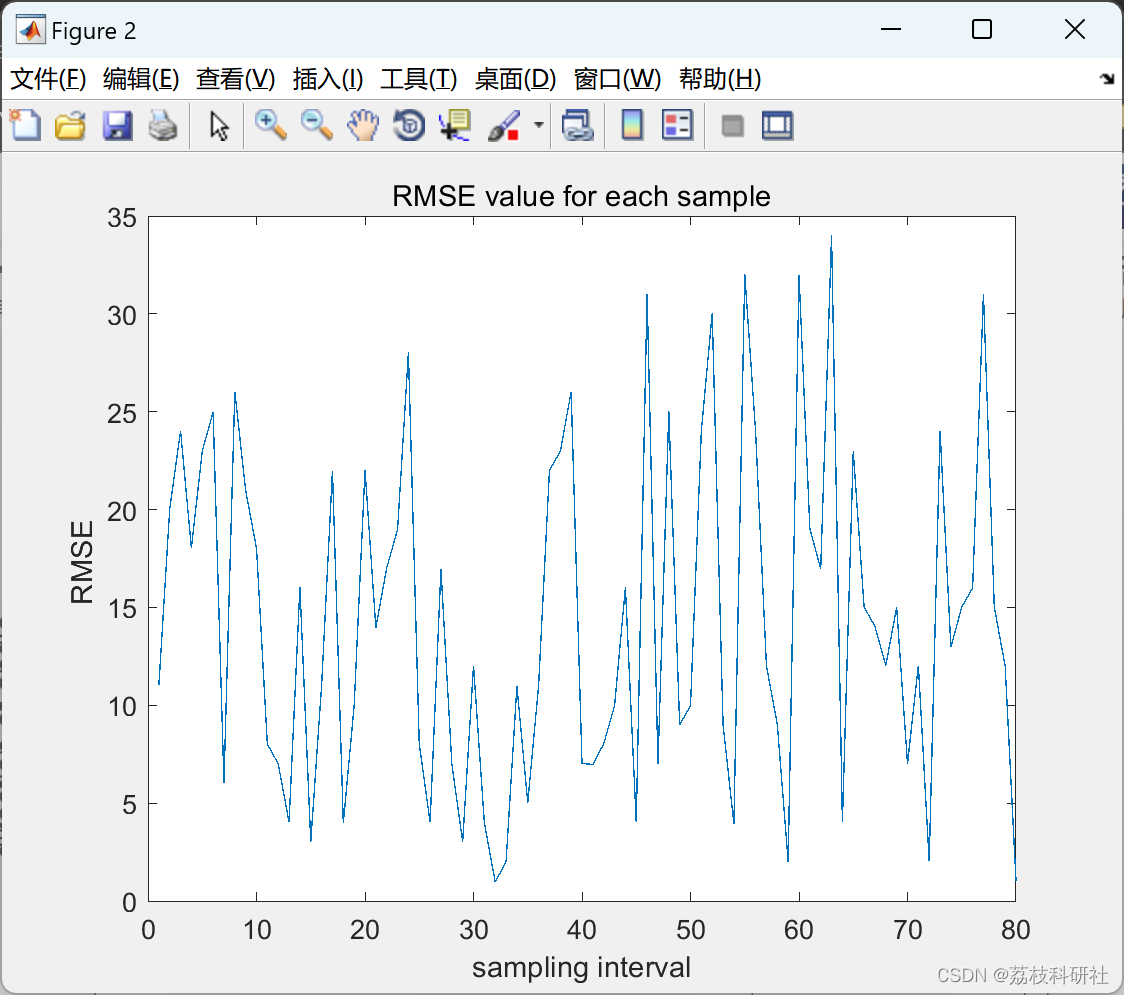
2.3 M估计鲁棒容积卡尔曼滤波

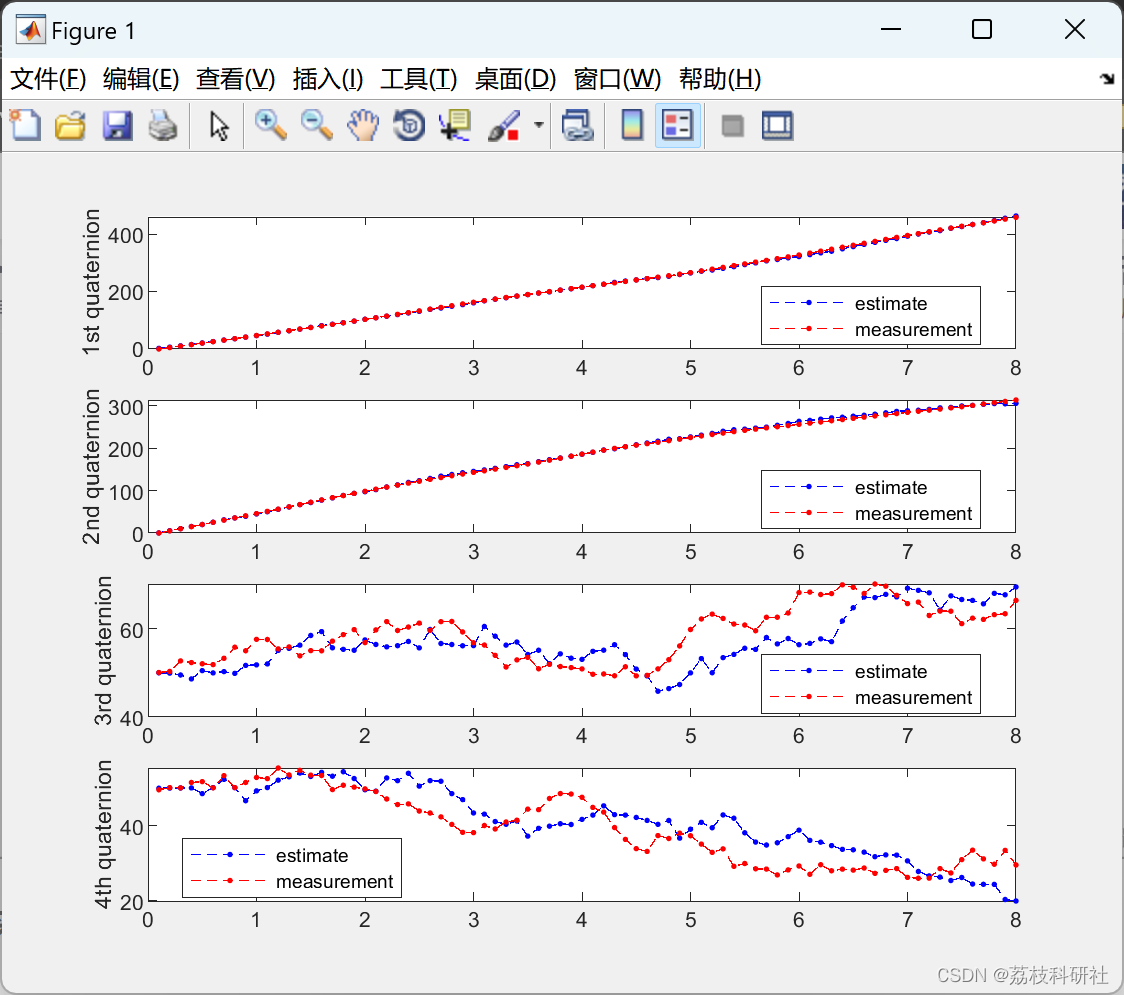
2.4 采用无迹卡尔曼滤波对无人机俯仰角、原始角、偏航角进行估计
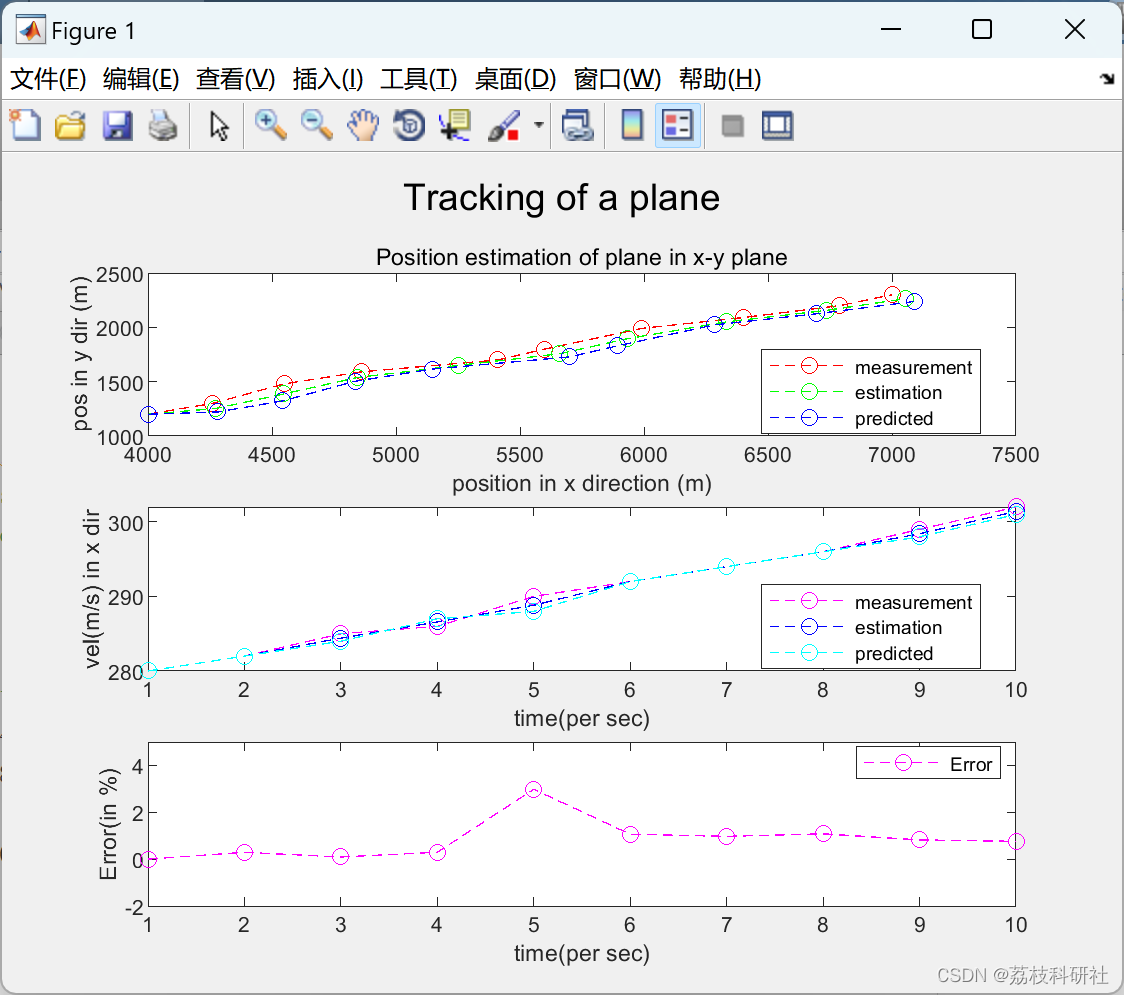
2.5 利用卡尔曼滤波进行无人机位置跟踪
部分代码:
%%Target Tracking
clc;
clear all;
%plane is flying but we will be considering its position only in the x
%direction to make it a 2-d case.
%initial state
xo=4000;
vox=280;
%Observations
X=[4000 4260 4550 4860 5410 5600 5990 6400 6790 7000];
V=[280 282 285 286 290 292 294 296 299 302];
%Process Errors in Process Covaiance Matrix
del_px=20; %initial covariance matrix is choosen intuitively
del_pv=5;
%initial conditions
acc_x=2;
del_t=1;
vx=280;
del_x=25; %uncertainity in the measurement
%Observation Error
del_X=25;
del_VX=6;
Xk=[];
%The Predicted State
A=[1 del_t;0 1];
B=[(0.5*((del_t).^2));del_t];
p=[];
for k=1:1:length(X)-1;
Xk_= [X(k);V(k)];
uk=acc_x;
Xkp1=((A*Xk_));
Xkp2=((B*uk));
Xkp=(Xkp1+Xkp2);%this is our first estimation
p=[p;Xkp];
%Initialising Process Covariance Matrix
Pk_=[((del_px).^2) 0;0 ((del_pv).^2)];
%Predicted Process Covariance Matrix
Pkp1=((A)*(Pk_));
Pkp2=((Pkp1)*(A'));
pkp=(Pkp2-[0 Pkp2(2);Pkp2(3) 0]); %since the 2nd and 3rd term are not imp.
%Calculating the Kalman gain
R=[((del_X)^2) 0;0 ((del_VX)^2)];
H=[1 0 ; 0 1];
K=((pkp)*H')/((H*pkp*H')+R);
%The New Observation
k=k+1;
Ykm=[X(k);V(k)];
C=[1 0;0 1];
Yk=C*Ykm;
%Calculating the Current State
Xk=[Xk; Xkp + K*(Yk-(H*(Xkp)))];
%Updating the process covariance matrix
Pk1=((eye)-(K*H))*pkp;
pk=(Pk1-[0 Pk1(3);Pk1(2) 0]);
k=k+1;
end
Xkf=[X(1)];
Vkf=[V(1)];
for k=1:2:(length(Xk)-1)
Xkf=[Xkf;Xk(k)];
end
for k=2:2:(length(Xk))
Vkf=[Vkf;Xk(k)];
end
prx=[X(1)];
prv=[V(1)];
for i=1:2:(length(p)-1)
prx=[prx;p(i)];
end
for i=2:2:(length(p))
prv=[prv;p(i)];
end
Y1=[1200 1300 1480 1590 1700 1800 1990 2090 2200 2300];
V1=[20 22 23 25 27 29 32 34 37 40];
%Process Errors in Process Covaiance Matrix
del_py=20; %initial covariance matrix is choosen intuitively
del_pv1=5;
%initial conditions
acc_y=2;
del_t=1;
vy=280;
del_y=25; %uncertainity in the measurement
%Observation Error
del_Y=25;
del_VY=6;
Yk=[];
%The Predicted State
A=[1 del_t;0 1];
B=[(0.5*((del_t).^2));del_t];
q=[];
for k=1:1:length(Y1)-1;
Yk_= [Y1(k);V1(k)];
uk2=acc_x;
Ykp1=((A*Yk_));
Ykp2=((B*uk2));
Ykp=(Ykp1+Ykp2);%this is our first estimation
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王文丽,何博.基于扩展卡尔曼滤波器的无人机状态估计[J].现代信息科技,2022,6(04):118-122.DOI:10.19850/j.cnki.2096-4706.2022.04.031.
[2]李雨石. 基于卡尔曼滤波器的无人机地面目标跟踪[D].中国民航大学,2012.
















 3426
3426











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











