






 文章介绍了四种常见的编码方式:归零编码、非归零(NRZ)、曼切斯特编码和差分曼切斯特编码,强调了每种编码的特点。其中,NRZ编码简单但无法区分逻辑0和总线空闲状态,而曼切斯特和差分曼切斯特编码通过位中间的电平跳变解决了这一问题。CAN协议采用NRZ编码,通过CAN_H和CAN_L两条线的电平关系确定总线逻辑。
文章介绍了四种常见的编码方式:归零编码、非归零(NRZ)、曼切斯特编码和差分曼切斯特编码,强调了每种编码的特点。其中,NRZ编码简单但无法区分逻辑0和总线空闲状态,而曼切斯特和差分曼切斯特编码通过位中间的电平跳变解决了这一问题。CAN协议采用NRZ编码,通过CAN_H和CAN_L两条线的电平关系确定总线逻辑。
1、常见的几种基础编码方式
1.1 常用编码方式有4种
一:归零编码
二:非归零吗(NRZ)
三:曼切斯特编码
四:差分曼切斯特编码
1.2 图示和简述原理
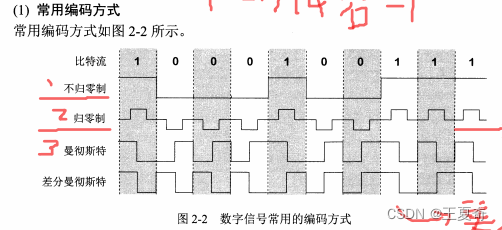
不归零编码:
一般 高电平代表1,低电平代表0;此类编码实现最为简单,硬件成本最低。
归零编码:
有三种状态,正脉冲+负脉冲+空闲状态。每一个码元中间都是跳变,一个码元可以分为3个部分,跳变部分,处于码元中间,两侧都需要回到“空闲状态”
曼切斯特编码:
每一个位时间内,都会在中心处产生跳变 高->低跳变代表1,低->高跳变代表0.
注意:曼切斯特编码仔细看看还是有比较特别的地方的,1->1.0->0的跳变,以及1—>0,0->1的跳变。比较一下他们的跳方式。它和RZ编码,形式上的最大区别,RZ编码,存在一个脉冲跳变(也就是存在一个上升沿+下降沿+(维持一段时间的高电平和低电平)),而曼切斯特编码则是从中间出,高电平到低电平代表1,低电平到高电平表示0。
也有一种方法判断,就是将一个码元分为前后两部分,前部分是高电平就=1,前半部分是低电平就表示0

差分曼切斯特编码:
继承了曼切斯特编码中心处,必有跳变的性质,在每一码元的开始出,有跳变的代表0,每一位开始处没有跳变的代表1(这一点和RZ-I和NRZ-I的编码方式正好是相反的,这两种是1,在码元处有跳变,0则没有跳变)。这里有一个问题就是如果第一位数值到底是编码为1,还是编码为0。(目前应该是采用差分曼切斯特编码有其办法避免我这种疑问),如果各位同仁知道请不吝赐教。大家比较1->1,0->0,1->0,0->1。不同的编码方式】
1.3 概念的理解
以上几种编码方式,只是规定了编码的方式,并没有规定具体的电压标准,具体的标准还要在具体的通讯协议,如TTL,CAN协议,以太网协议中才会规定具体的电压水平。
举一个例子:比如写论文,编码只是规定了格式,但是具体使用什么字体,字体大小、颜色都是具体不同文章,具体规定。
2、具体的技术细节
2.1 NRZ编码
可分为 NRZ-L(Non-Return-to-Zero-Level,非归零电平)和 NRZ-I(Non-Return-to-Zero-Invert,非归零反相)两种主要类型,以下为你详细介绍:
2.1.1 NRZ-L(非归零电平)
- 编码规则:使用不同的电平值来直接表示二进制数据中的 0 和 1。通常情况下,高电平表示二进制的 1,低电平表示二进制的 0。在整个码元周期内,信号电平保持不变,不会回到零电平。
- 优点:实现简单,易于理解和实现,硬件成本较低。
- 缺点:存在直流分量,不适合通过变压器等交流耦合设备进行传输;当出现连续的 0 或 1 时,接收端难以提取同步时钟信号,容易导致同步丢失。
- 应用场景:常用于短距离、低速率的通信系统,如计算机内部的数据传输,像早期的计算机总线数据传输就可能采用 NRZ-L 编码。
2.1.2 NRZ-I(非归零反相)
- 编码规则:根据信号电平的变化来表示二进制数据。如果当前位为 1,则信号电平相对于前一位发生翻转;如果当前位为 0,则信号电平保持不变。
- 优点:相较于 NRZ-L,它在一定程度上减少了连续相同电平的出现,使得接收端更容易提取时钟信号,提高了同步性能。1越多,接收端就更容易提取同步信号。
- 缺点:仍然存在直流分量问题;当出现连续的 0 时,信号电平保持不变,可能会导致接收端的同步困难。
- 应用场景:在一些对同步要求较高的通信系统中应用,例如 USB(Universal Serial Bus,通用串行总线)1.1 和 2.0 标准中就采用了 NRZ-I 编码方式来传输数据。
2.1.3 NRZ-I(非归零反相)编码的“指定初始电平”和“前导码”
- 指定初始电平:通信双方预先约定一个初始电平状态,比如约定初始电平为低电平(逻辑 0)或者高电平(逻辑 1)。这是一种常见的做法,因为在通信开始前,发送方和接收方需要进行一些初始化操作,其中就可以包含对初始电平的约定。
- 使用前导码:在正式数据传输之前,先发送一段特定的前导码序列。这个前导码序列用于同步和建立初始电平状态。接收方通过检测前导码来确定初始电平,然后再开始对后续的数据进行解码。
2.1.4 NRZ中“电平”和“总线电压”不是同一回事
- 定义:
- 低电平 → 二进制 0
- 高电平 → 二进制 1
这个定义是“一定的”和“确定的”
但是,比较违反常识的是“低电平”和“低电压”并不是一回事。
-
- 低电平通常为 0V(如 TTL 电平标准),但实际应用中可能因协议不同而变化。例如:
- RS-232 标准中,低电平(0)对应 + 5V 至 + 12V,高电平(1)对应 - 5V 至 - 12V。
- CAN 总线中,低电平(0)通过差分电压表示(如 CAN_H=3.5V,CAN_L=1.5V,差分电压 2V)。
- 低电平通常为 0V(如 TTL 电平标准),但实际应用中可能因协议不同而变化。例如:
- 电平绝对值直接代表数据,但低电平不一定是 0V,需根据协议确定。
- 同理高电平也是,高电平不一定是代表高电压
2.1.5 基于NRZ的其他编码技术-差分电压编码
这一段是一个延伸,以CAN协议中的编码-差分电压编码举例。
CAN总线中,存在一条CAN_H和一条CAN_L,两条线都是基于NRZ编码技术,独立编码的。两条线上规定当电压>2V时,编码=1,低于2V,编码为0。
但是最终编码到底是1还是0,取决于:
最终编码 = CAN_H编码 & CAN_L编码。
当CAN_H&CAN_l 电压都是=2.5V左右时,最终编码 = 1 &1 =1
当CAN_H电压升高=3.5V时,CAN_L下降为1.5V时,最终编码 = 1&0 =0 ;
2.2 RZ编码
2.2.1. 归零编码(RZ)的基本原理
- 编码规则:
- 二进制 1:在码元周期的中间存在一个正向脉冲。
- 二进制 0:在码元周期中间存在一个负脉冲。
- 信号波形:
每个码元中间有一个电平跳变,确保信号在每个周期结束时回到零。
2.2.2. 归零编码的变种
根据电平映射规则,归零编码可分为两种主要类型:
(1) RZ-L(归零电平编码)
- 直接映射:
- 高电平(如 3.3V)→ 二进制 1
- 零电平(0V)→ 二进制 0
- 特点:
信号在每个码元周期内必须回到零,消除了直流分量。
(2) RZ-I(归零差分编码)
- 差分映射:
- 电平翻转 → 二进制 1
- 电平不变 → 二进制 0
- 特点:
通过电平变化隐含数据,同时在每个码元周期内归零。
- 编码规则:
- 二进制 1:在码元周期的前半段保持高电平,后半段回到零电平。
- 二进制 0:在码元周期内始终保持低电平(或零电平)。
- 编码规则图示:
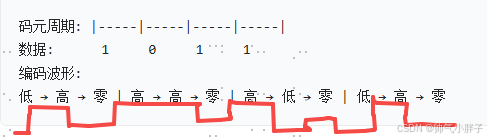
即与1编码的元素,它中间的电平与上个电平的电平的脉冲方向,相反!!!
看图找出RZ-I的编码规律,首先我们将一个码元分割为3个小部分,如下图
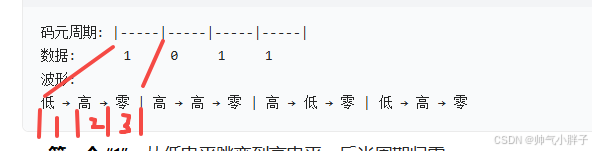
依次编号 “1-1-1” 就是指图中第一个码元,数据为1,分割部分的第1部分。
比较如下部分:
1-1-2与2-0-1;
2-0-2与3-1-1
3-1-2与4-1-1
我们发现规律了,每一个码元,其第一部分总和上个码元的第二部分一样。
再比较以下部分:
1-1-2与2-0-2
2-0-2与3-1-2
发现,0与前一个码元的第二部分保持一致。
1与上个码元的第二部分保持反方向的脉冲。
小结 RZ编码方式和NRZ编码方式的差异
| 对比项目 | NRZ - L | NRZ - I | RZ - L | RZ - I |
|---|---|---|---|---|
| 物理层差异 | 用固定高、低电平分别代表二进制 1 和 0,在整个码元周期内电平保持不变,无电平跳变规律用于同步 | 电平变化代表二进制 1,电平不变代表二进制 0,无归零操作,依赖电平变化实现差分编码 | 高电平代表二进制 1,低电平代表二进制 0,但在每个码元周期内信号会回到零电平 | 数据 “1” 时电平相对于前一码元跳变并在周期后半段归零,数据 “0” 时电平不变且后半段归零,通过差分跳变和归零编码 |
| 对带宽的要求 | 低,信号变化频率低,只需在数据改变时变化电平,占用带宽窄 | 低,类似 NRZ - L,在整个码元周期内电平相对稳定,变化频率不高,带宽需求小 | 高,每个码元周期有两次电平转换(数据变化和归零),信号变化频率高,需更宽带宽 | 高,每个码元有跳变和归零两次电平变化,信号频率高,带宽需求大 |
| 同步能力 | 弱,连续相同数据时电平无变化,接收端难提取时钟信号,需额外同步机制 | 较好,“1” 时电平翻转可为接收端提供时钟信息,但连续 “0” 时同步困难 | 强,每个码元结束归零为接收端提供明确码元边界,易提取时钟信号实现同步 | 强,归零和跳变都为接收端提供同步信息,能有效恢复时钟信号 |
| 硬件实现成本 | 低,编码规则简单,直接映射电平与数据,无需复杂电路和控制逻辑,硬件成本低 | 低,虽基于电平变化编码,但编解码电路实现难度不大,硬件成本相对较低 | 高,需额外电路实现归零操作,增加硬件设计复杂度和成本 | 高,要处理差分跳变和归零操作,硬件电路更复杂,成本更高 |
| 软件开发难度 | 低,逻辑简单,直接将数据转换为电平信号,软件实现容易 | 低,电平变化逻辑不复杂,软件实现难度不大 | 中,需考虑归零操作的时机和控制,软件实现稍复杂 | 中,要处理差分跳变和归零,软件逻辑相对复杂 |
| 协议复杂度 | 低,协议简单,只需定义电平与数据的映射关系 | 低,协议基于电平变化,规则不复杂 | 中,要规定归零方式和时间,协议复杂度增加 | 中,涉及差分跳变和归零规则,协议相对复杂 |
| 应用场景 | 计算机内部短距离、低速率通信,如早期计算机总线数据传输 | USB 1.1 和 2.0 等对同步有一定要求的短距离通信系统 | 早期数字通信系统、对同步要求高的工业控制和测量仪器领域 | 对同步要求极高、噪声环境复杂的工业控制网络,如 PROFIBUS |
| 直流分量 | 有,长时间固定电平产生直流分量,可能导致基线漂移 | 有,电平长时间不变会产生直流分量 | 无,每个码元周期归零,无直流分量积累 | 无,每个码元结束归零,避免直流分量问题 |
| 抗干扰能力 | 弱,依赖绝对电平,受噪声影响大 | 较好,基于电平变化编码,对绝对电平不敏感,抗干扰能力较强 | 较好,归零操作使信号变化明显,减少噪声影响 | 好,差分跳变和归零结合,抗干扰能力强 |
2.3 曼切斯特编码
先看上图中“曼切斯特编码”,观察如下选项
(1)1 跳变 0:![]()
(2)0跳变为0 ![]()
(3)0跳变为1 
(4)1跳变为1  和
和![]()
2.3.1 编码规则补充
开头总结了,观察曼切斯特编码“将一个码元分割成两部分,左边部分是高电平就是1,低电平就是0”
观察后发现,编码1,总在中间存在一个“下降沿”。编码0,中间一定存在一个“上升沿”。
按照上述两个规则,你可以手画出所有基于曼切斯特编码的电平示意图。
2.3.2 曼切斯特编码的同步优势
第一段中的截图中,可以看出,无论哪一种变化,在两个码元之间,总线电平至少跳变一次,最多跳变4次。
2.4 差分曼切斯特编码
2.4.1 编码规则
(规则1)在每一码元的开始出,有跳变的代表0,每一位开始处没有跳变的代表1
(规则2)在码元中间位置处,必定存在一个跳变
3、实际应用
理解编码的基础逻辑之后。我们结合不同的编码方式与不同的总线,谈谈不同协议的帧结构采用不同编码方式,对帧结构的影响。
CAN协议编码方式是NRZ,不归零编码方式,CAN采用的差分线与形式,有两条CAN_H与CAN_L。可以这么理解CAN_H采用NRZ编码,高电平代表1,低电平代表0。CAN_L也是同样逻辑。
总线逻辑=CAN_H&CAN_L。
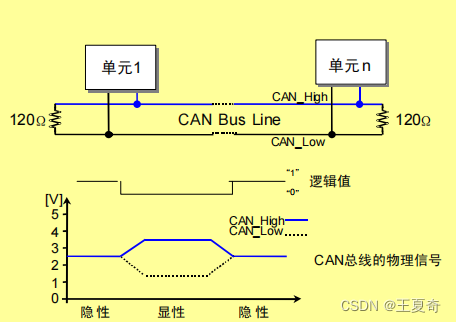
大家明白了吧,当CAN-H电压被拉高,CAN_L电压被拉低。CAN_lCAN_H =1高电平。CAN-L=0。相与后的到的值为0。当CAN_H与CAN_L重叠时,CAN_H=1,CAN_L=1。所以总线逻辑也为1。
采用NRZ编码还有一个问题,就是总线电平只有两种状态,高电平和低电平。但是通讯中却有三种状态,逻辑0,逻辑1,和总线空闲状态。NRZ编码方式导致了必然有两种编码逻辑共享一种电平。比如逻辑0和总线空闲共享低电平。这将导致如果不采用特别的机制,总线上将无法分别逻辑0和总线空闲
归零码,曼切斯特编码和差分曼切斯特编码肯定不会存在这样的问题

















 1988
1988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









