







目录
一、注释:
参数:pwm:最大速度值,P:比例系数
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2···k;
pid巡线函数:track_PID
float Proportion; // 比例常数 Proportional Const
float Integral; // 积分常数 Integral Const
float Derivative; // 微分常数 Derivative Const
int Error1; // Error[n-1]
int Error2; // Error[n-2]
int iError; // Error[n]
PID position 位置式
PID int MatOut 设定输出最大值
int Setpoint PID控制器设定值
position.iError=Setpoint-CurrentPoint; // 计算当前误差
position.Error_sum+=position.iError;
iIncpid=position.Proportion * position.iError // P
+position.Integral * position.Error_sum // I
+position.Derivative * (position.iError-position.Error1); // D
position.Error1=position.iError; // 存储误差,用于下次计算
sensor 传感器
analog 模拟值
左偏设置值为正,右偏设置值为负
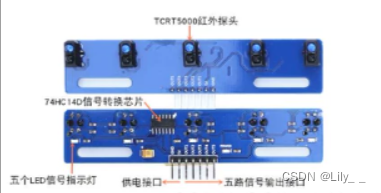
二、接线
五路灰度传感器----stm32
DND--------------GND
VCC--------------5V
L2---------------C13
L1---------------C4
M----------------E6
R1---------------E5
R2---------------A4(可自行更改)
通讯协议
要想得到偏移量就必须使用串口传输的形式

三、代码
灰度传感器bsp_GraySensor.c
#include "bsp_GraySensor.h"
#include "main.h"
#include "adc.h"
#include "control.h"
//ÓÃÀ´Ñ²ÏßµÄ '»Ò¶È´«¸ÐÆ÷' ºÍ ÓÃÀ´¼ì²âÊÇ·ñ·ÅÉÏÒ©Æ·µÄ 'ºìÍâ´«¸ÐÆ÷' µÄ´úÂ붼·ÅÔÚÕâ¸ö.cÎļþÀïÁË
u8 L2_Val, L1_Val, M_Val, R1_Val, R2_Val;
int Line_Num;
u16 ADC_Value;
float ADC_Volt;
u8 Load_flag =0; // 0±íʾ»¹Ã»×ªÔØÒ©Æ·£¬±íʾתÔØÍê±Ï£¬-1±íʾҩƷËÍ
u8 LoadCount,NotLoadCount;
/*******************»Ò¶È´«¸ÐÆ÷ѲÏß*************/
//Ö»Òª°ÑËٶȻ·¿ØÖƺ㬲¹³¥Öµ¼´¿ÉÈ·¶¨¡£ ²»Í¬ËÙ¶ÈÖµÐèÒª²»Í¬µÄ²¹³¥Öµ¡£ ²âÊÔºÃÒ»¸ö×îºÃµÄ¡£ ²»Í¬µÄתËÙÒª¶ÔÓ¦²»Í¬µÄ²¹³¥ÏµÊý»òÊýÖµ
void Light_GoStraight_control(void) //»Ò¶ÈѲÏßÖ±ÐÐ, ÐèÒªÓиöÅжÏÐèÒªÖ±Ðж೤¾àÀëµÄº¯Êý //²¹³¥Òªµ½ÖмäµÄ´«¸ÐÆ÷²âµ½»Øµ½ÏßÉÏΪֹ
{
Get_Light_TTL();
//Èç¹ûÒª¸ü¼Ó¾«×¼µÄ¿ØÖÆ£¬Ö»ÒªÓÐÁËѲÏß»·£¬¶¼ÐèÒª¶ÔλÖýøÐв¹³¥¡£ ¿É·ñÖ±½Ó½« g_lMotorPulseSigma ºÍg_lMotor2PulseSigma ½øÐÐÊýÖµ¼Ó¼õ£¿£¿
//Èç¹ûÑ°Ö±ÏßÓõĴ«¸ÐÆ÷¿ÉÒÔ¶ÁÈ¡Ä£ÄâÁ¿µÄ»°£¬Èý¸ö´«¸ÐÆ÷¶¼¿ÉÒÔѲֱÏßѰͦÎȵÄ
if(L1_Val == 0 && M_Val == 1 && R1_Val == 0 ) Line_Num = 0;
if(L1_Val == 0 && M_Val == 1 && R1_Val == 1) Line_Num = 400;
if(L1_Val == 0 && M_Val == 0 && R1_Val == 1 ) Line_Num = 500;
if(L1_Val == 1 && M_Val == 0 && R1_Val == 0) Line_Num = -500;
if(L1_Val == 1 && M_Val == 1 && R1_Val == 0) Line_Num = -400;
// if(LineNumToggleFlag == 1)
// {
// Line_Num = - Line_Num;
// }
}
//°Ñ»Ò¶È´«¸ÐÆ÷µ±×÷Ö»Êä³ö¸ßµÍµçƽ¡£ ¸ßµçƽÊÇʶ±ðµ½ºìÏßÁË¡£
void Get_Light_TTL(void)
{
if(HAL_GPIO_ReadPin(L2_GPIO_Port, L2_Pin) == GPIO_PIN_SET){L2_Val = 1;} else {L2_Val = 0;}
if(HAL_GPIO_ReadPin(L1_GPIO_Port, L1_Pin) == GPIO_PIN_SET){L1_Val = 1;} else {L1_Val = 0;}
if(HAL_GPIO_ReadPin(M_GPIO_Port, M_Pin) == GPIO_PIN_SET) {M_Val = 1;} else {M_Val = 0;}
if(HAL_GPIO_ReadPin(R1_GPIO_Port, R1_Pin) == GPIO_PIN_SET){R1_Val = 1;} else {R1_Val = 0;}
if(HAL_GPIO_ReadPin(R2_GPIO_Port, R2_Pin) == GPIO_PIN_SET){R2_Val = 1;} else {R2_Val = 0;}
}
/********¼ì²âÊÇ·ñתÔØÒ©Æ·*************/
void LoadOrNot()
{
HAL_ADC_Start(&hadc1);
if(HAL_ADC_PollForConversion(&hadc1, 10) == HAL_OK)
{
ADC_Value = HAL_ADC_GetValue(&hadc1);
ADC_Volt = (float)ADC_Value*3.3/4096.0;
}
if(ADC_Volt <= 1.6)
{
NotLoadCount = 0;
LoadCount++;
if(LoadCount > 3) //3´Î³ÌÐòÖ´Ðе½ÕâÖ®ºóÔÙ´ÎÅжÏ
{
Load_flag = 1;
}
}
else if(ADC_Volt > 1.6)
{
LoadCount = 0;
if(Load_flag == 1) //±ØÐëÏÈ×°ÔعýÒ©Æ·µÄÇé¿öϲÅÄÜÅжÏÊÇ·ñÄÃ×ßÒ©Æ·
{
NotLoadCount++;
if(NotLoadCount > 3 ) //3´Î³ÌÐòÖ´Ðе½ÕâÖ®ºóÔÙ´ÎÅжÏ
{
Load_flag = 2;
}
}
}
}
灰度传感器部bsp_GraySensor.h
#ifndef __GRAYSENSOR_H
#define __GRAYSENSOR_H
#include "bsp_sys.h"
extern u8 L2_Val, L1_Val, M_Val, R1_Val, R2_Val;
extern u16 ADC_Value;
extern float ADC_Volt;
extern u8 Load_flag;
extern int Line_Num;
void LoadOrNot(void);
void Get_Light_TTL(void);
void Light_GoStraight_control(void);
#endif
主函数main.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* <h2><center>©  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 770
770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









