






多智能体协同无人车无人机无人船编队控制路径跟随
基于模型预测控制的无人艇分布式编队协同控制
MPC matlab控制仿真 代码 simulink控制器
路径规划
ID:4671715089422901
南唐著名地椒糖

随着人工智能和自动化技术的不断发展,多智能体协同控制已经成为无人车、无人机以及无人船等无人系统领域的研究热点之一。在无人艇分布式编队协同控制方面,模型预测控制(Model Predictive Control,MPC)不仅是一种有效的控制策略,同时也广泛应用于路径规划和控制器的设计中。
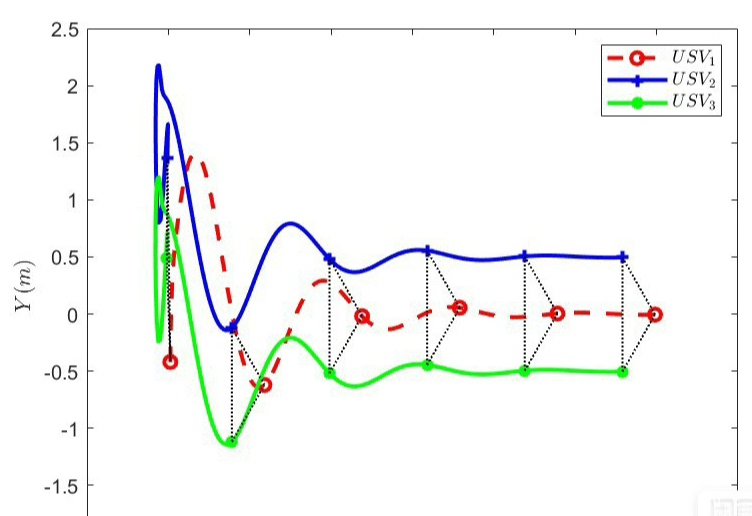
首先,我们需要了解什么是多智能体协同控制。多智能体系统是由多个智能体(agents)组成的集合,每个智能体都具有自主性和一定的智能化能力。这些智能体之间通过通信和合作实现特定的任务,而协同控制则是指多个智能体共同完成任务的过程。在无人艇编队控制中,无人艇之间需要通过协同控制实现路径跟随和编队形成等任务。
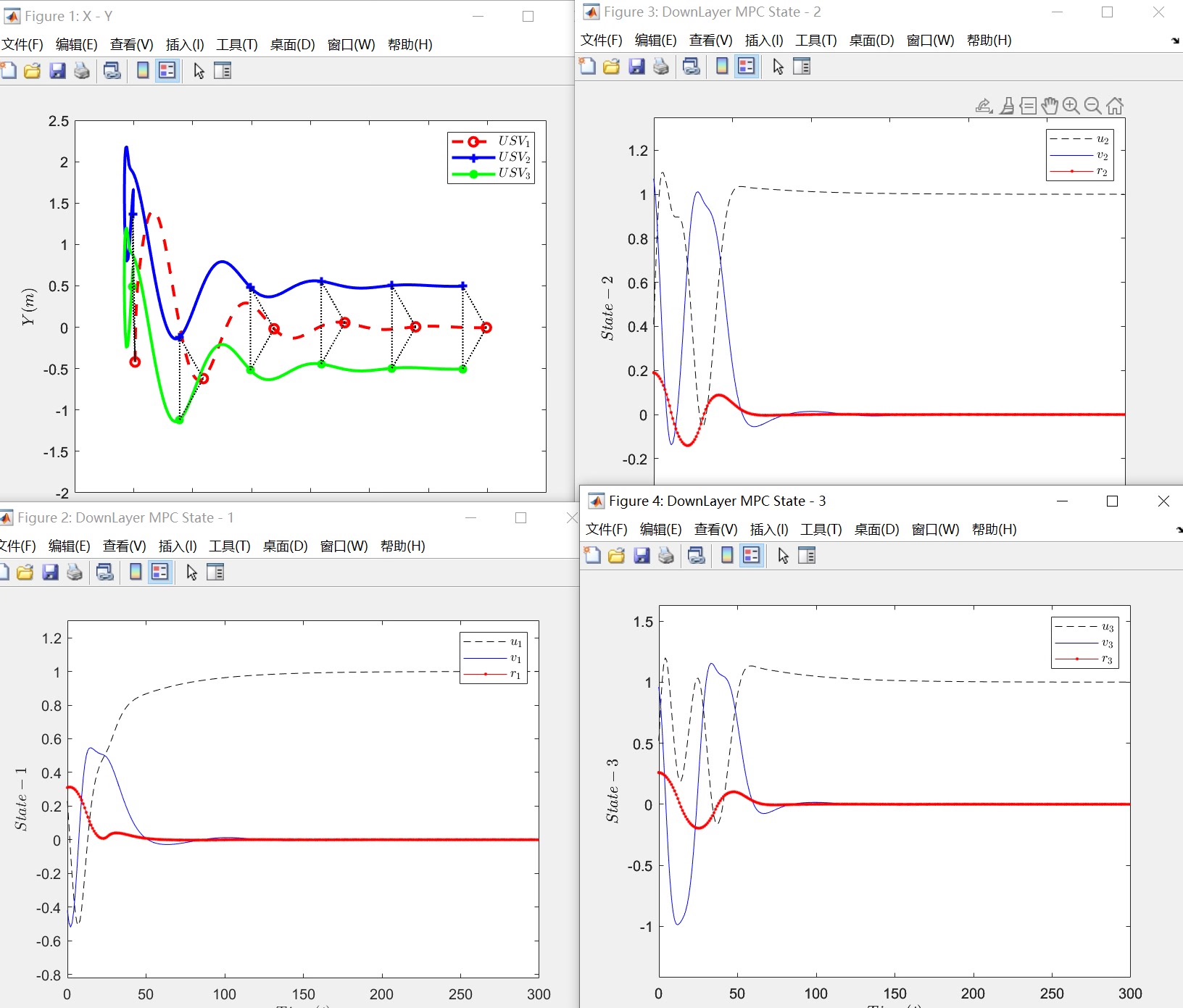
基于模型预测控制的无人艇分布式编队协同控制是一种常用的控制方法。模型预测控制可以通过对未来一段时间内系统状态的预测来优化控制策略,从而实现对系统的精确控制。在无人艇编队控制中,模型预测控制可以通过预测无人艇的位置和速度等状态变量来调整无人艇的控制输入,从而实现编队的形成和路径跟随。
为了验证模型预测控制在无人艇编队控制中的有效性,可以利用Matlab进行控制仿真。Matlab是一种强大的数学计算软件,其中的Simulink工具箱可以帮助我们建立系统的控制器模型,并进行仿真实验。通过编写MPC控制器的Matlab代码,并在Simulink中进行仿真,我们可以评估模型预测控制在无人艇编队控制中的控制性能。
在无人艇分布式编队协同控制中,路径规划是一个重要的环节。路径规划可以通过算法和搜索方法来确定无人艇的运动轨迹,从而实现编队形成和路径跟随。常用的路径规划方法包括A*算法、Dijkstra算法以及遗传算法等。这些方法可以根据无人艇的目标位置、环境约束以及编队形成要求等因素,自动生成最优的路径规划方案。
总之,基于模型预测控制的无人艇分布式编队协同控制是一种高效且可行的控制策略。通过使用Matlab进行控制仿真和路径规划,我们可以评估控制器的性能并优化编队协同控制的效果。未来,随着人工智能和自动化技术的不断发展,无人艇分布式编队协同控制将在智能交通和物流领域发挥越来越重要的作用。
【相关代码,程序地址】:http://fansik.cn/715089422901.html
















 1774
1774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









