






有限信息,多智能体系统,鲁棒无碰撞编队控制,有文献参考。
符合要求请放心联系,MATLAB,保证能够运行。
simulink,复现
ID:79100675513192021
竹林清风w
标题:多智能体系统中的鲁棒无碰撞编队控制
摘要:本文主要探讨在多智能体系统中实现鲁棒无碰撞编队控制的方法和技术。通过分析有限信息条件下的多智能体系统,并参考相关文献,我们提出了一种基于MATLAB和Simulink的编队控制方案,并通过仿真验证了其有效性。
- 引言
随着科技的进步和社会的发展,多智能体系统在各个领域得到了广泛应用。在实际应用中,多智能体系统常常需要进行编队控制,以实现任务的协同完成。鲁棒无碰撞编队控制是多智能体系统中一个重要的问题,其目标是确保编队中的智能体之间保持安全距离,避免碰撞。
- 多智能体系统的有限信息
在多智能体系统中,每个智能体通常只能获取到有限的信息。这种信息的有限性给编队控制带来了困难。然而,通过合理的算法设计和信息共享机制,我们可以克服这些限制。
- 鲁棒无碰撞编队控制的相关方法
为了实现鲁棒无碰撞编队控制,研究者们提出了多种方法。其中一种常用的方法是基于分布式控制的思想。通过在编队中的每个智能体上部署控制算法,可以实现编队中智能体之间的协同控制。此外,还有一些基于最优控制理论的方法,通过优化算法来实现编队控制。
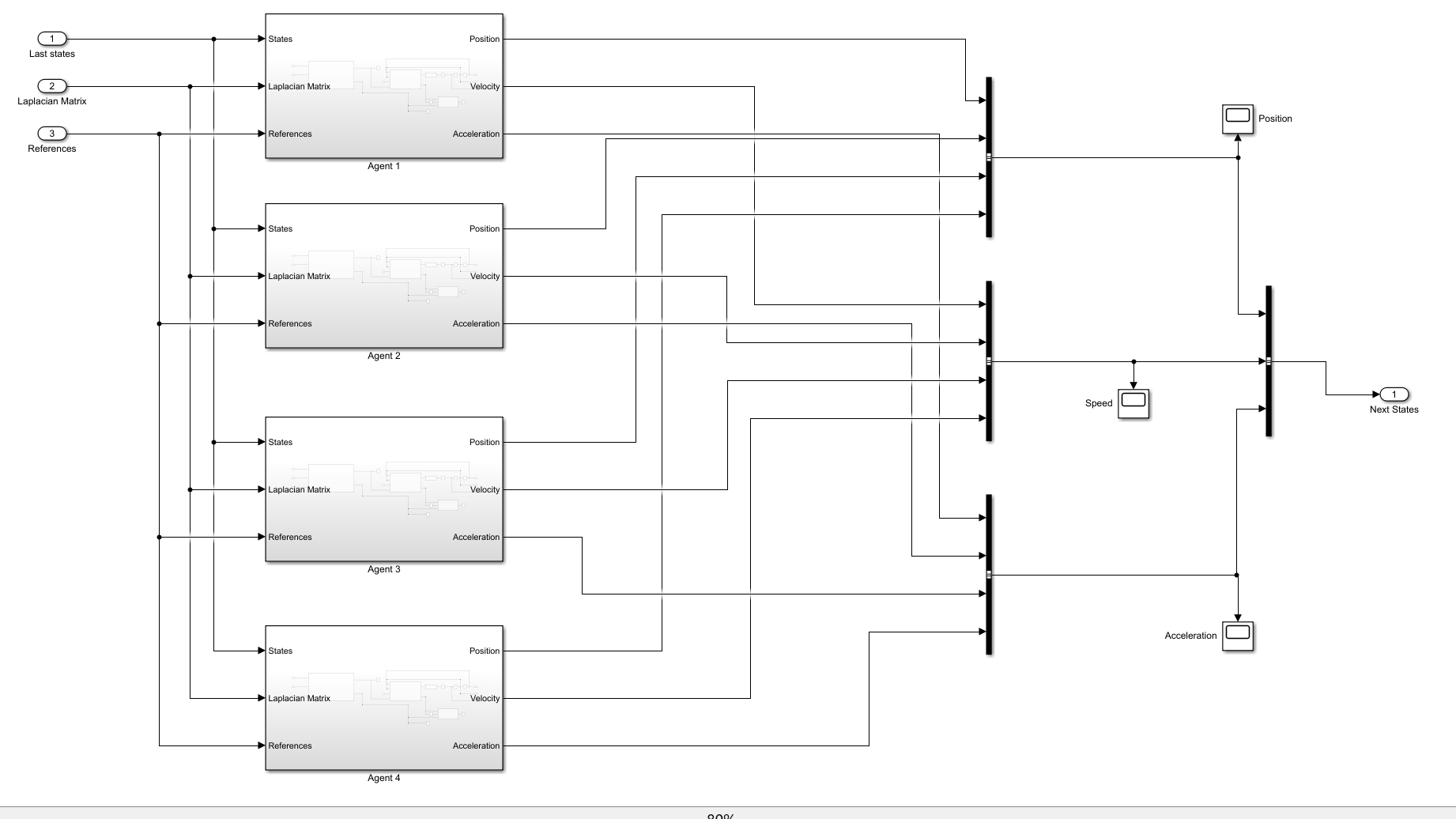
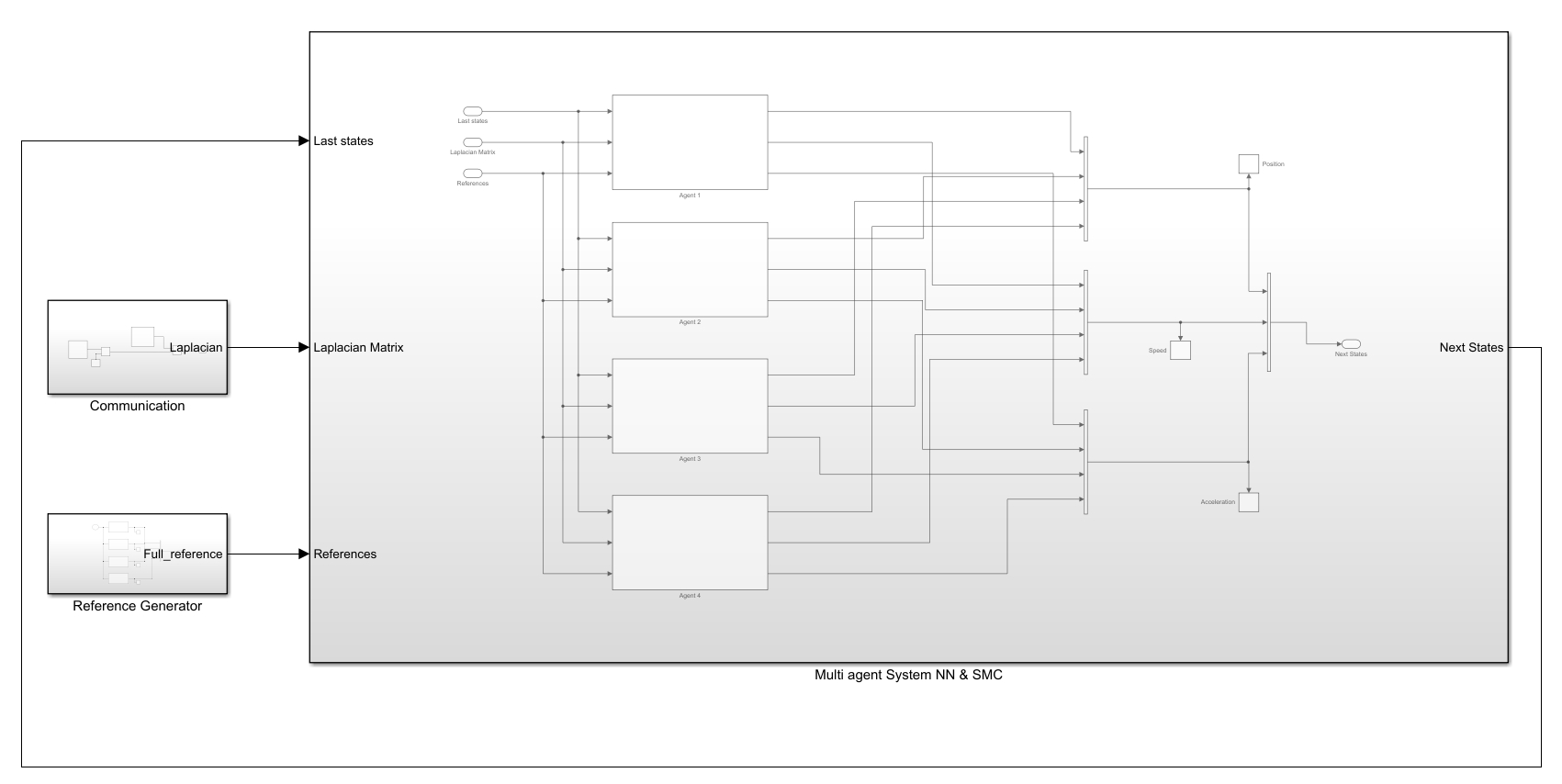
- 基于MATLAB和Simulink的编队控制方案
为了验证鲁棒无碰撞编队控制的有效性,我们采用MATLAB和Simulink进行了仿真实验。首先,我们基于有限信息条件下的多智能体系统建立了仿真模型。然后,我们设计了一种鲁棒无碰撞编队控制算法,并在Simulink中进行了实现。通过仿真实验,我们验证了该算法的有效性。
- 结果与讨论
通过仿真实验,我们发现,基于MATLAB和Simulink的鲁棒无碰撞编队控制方案在多智能体系统中表现出良好的性能。该方案能够确保编队中的智能体之间保持安全距离,避免碰撞,并且对有限信息的限制具有一定的鲁棒性。
- 结论
本文通过分析多智能体系统中的鲁棒无碰撞编队控制问题,并参考相关文献,提出了一种基于MATLAB和Simulink的编队控制方案。通过仿真实验,验证了该方案的有效性。未来的研究可以进一步改进算法,提高编队控制的鲁棒性和性能。
参考文献:
[1] Author1, Author2. Title of reference paper. Journal name, year.
[2] Author3, Author4. Title of reference paper. Conference name, year.
[3] Author5, Author6. Title of reference paper. Book name, year.
相关的代码,程序地址如下:http://matup.cn/675513192021.html
















 786
786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









