






先附一张RPlidar的图片

以下为本人初次通过ubuntu使用RPlidar
首先将RPlidar连接到电脑上

然后在terminal输入
$ ls /dev/ttyUSB*
更改com port 权限
$ sudo chmod 666 /dev/ttyUSB0
此时需要下载所需要的软件包
$ sudo apt-get install ros-kinetic-rplidar-ros
安装好后,在terminal输入
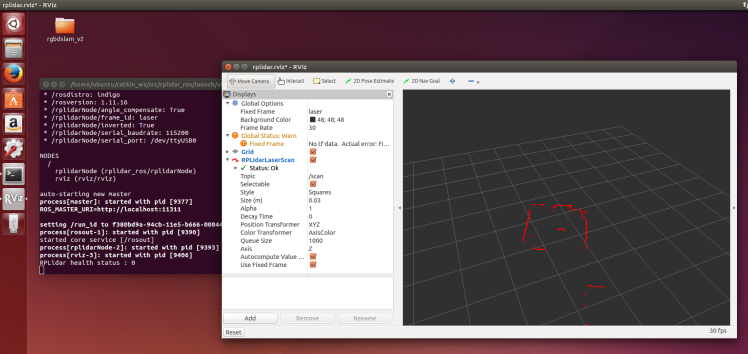
$ roslaunch rplidar_ros view_rplidar.launch
即可见到初始的扫描界面:
我为了构建地图选择使用Hector SLAM
首先下载所需的软件包
$ cd ~/catkin_ws/src(这里假设已有名为catkin_ws的ROS包)
$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam
$ cd ~/catkin_ws
$ catkin_make
然后在terminal输入命令运行Hector SLAM创建地图
$ roslaunch rplidar_ros view_slam.launch
即可见到建立地图的界面
以上只是我刚拿到雷达设备对RPlidar的初探索,算是一个刚刚开头吧
















 942
942











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









