






七自由度车辆模型,包含横向位移,纵向,横摆,四个车轮回转运动的七自由度非线性动力学模型。
ID:9529713986103578
x***1
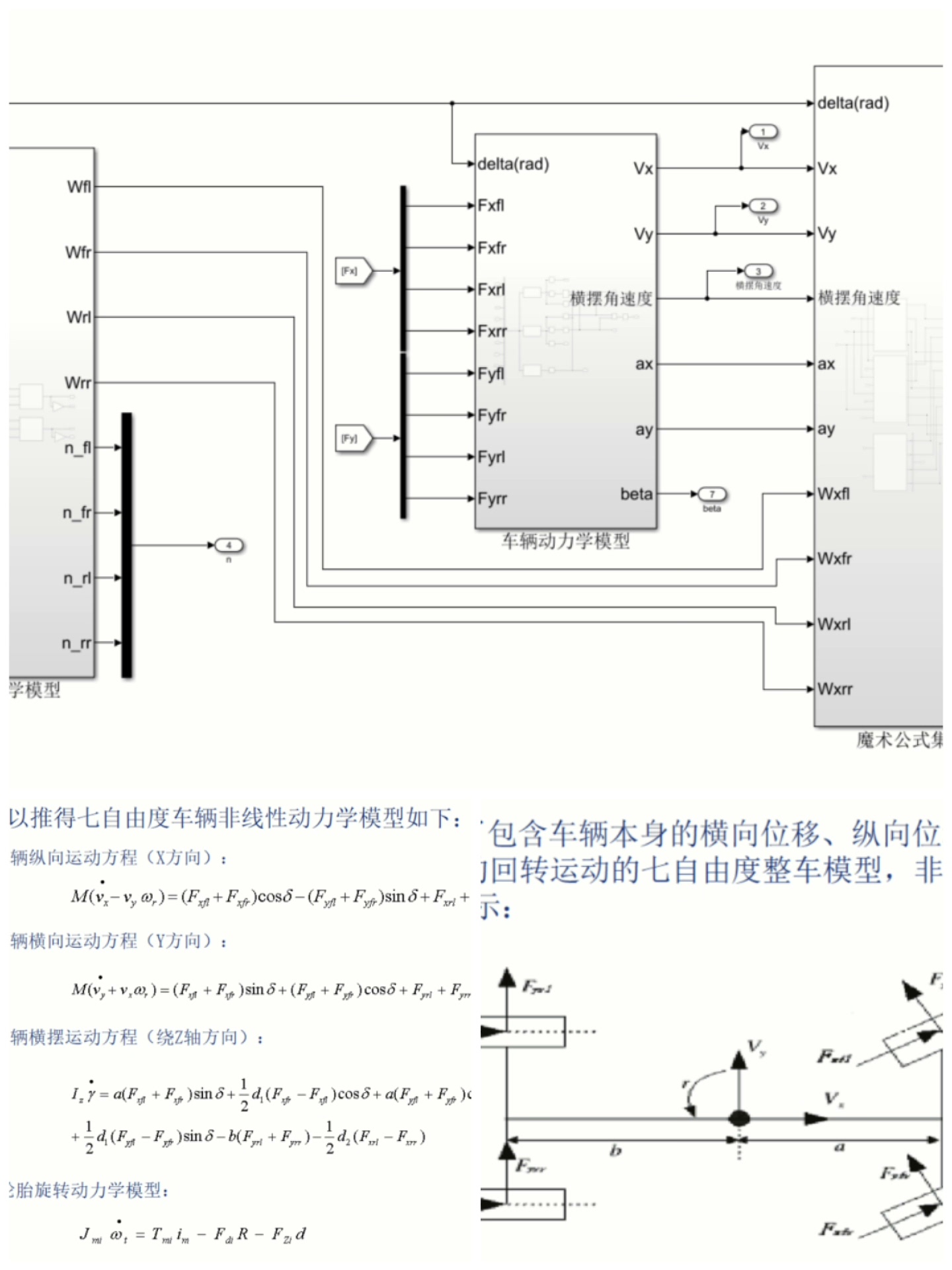
七自由度车辆模型是一种描述车辆运动的数学模型,它包括横向位移、纵向位移、横摆角度以及四个车轮的回转运动,总共七个自由度。这个模型的非线性动力学性质使其可以更准确地描述车辆的运动特性,对于开发车辆控制算法和设计车辆动态系统具有重要意义。
在车辆控制领域,准确地建立车辆动力学模型是实现精确控制的关键一步。七自由度车辆模型可以通过考虑车辆的横向位移、纵向位移、横摆角度以及四个车轮的回转运动来更加真实地描述车辆在不同运动状态下的行为。与传统的二自由度模型相比,七自由度模型能够更好地模拟车辆在转弯、换道、加速、制动等各种情况下的运动特性,更加准确地反映了车辆的操控性能。
对于七自由度车辆模型的建立,首先需要考虑车辆的几何结构和运动学关系。横向位移、纵向位移和横摆角度是描述车辆整体运动的主要参数,它们与车辆的转向角度、侧倾角以及车轮的转速等密切相关。而车轮的回转运动则是描述车轮与地面之间的接触关系,包括车辆的滚动、侧滑以及刹车等运动。
在建立七自由度车辆模型时,需要考虑车辆的非线性特性。例如,车辆在高速转弯时会出现横滑现象,这是由于车轮与地面之间的摩擦力限制导致的。此外,车辆在加速和制动时也会受到不同程度的动力学耦合影响,这些非线性因素都需要在模型中进行考虑。
为了解决七自由度车辆模型的非线性问题,研究者们提出了多种数学方法和控制策略。其中一种常用的方法是使用线性化技术,将非线性模型近似为线性模型,然后在此基础上设计控制器。另外,也有人采用基于物理特性的建模方法,通过考虑车辆的力学特性来提高模型的准确性。
七自由度车辆模型在实际应用中有着广泛的应用。例如,在智能驾驶领域,准确建立车辆模型可以帮助车辆感知和路径规划系统更好地理解车辆的运动特性,从而提高自动驾驶系统的安全性和稳定性。此外,在车辆动力学仿真和虚拟试验中,七自由度车辆模型也是必不可少的工具,它可以帮助工程师们更好地分析和优化车辆的性能。
综上所述,七自由度车辆模型是一种非常重要的技术工具,它可以准确地描述车辆的运动特性,并为车辆控制算法和动态系统设计提供支持。通过建立准确的七自由度车辆模型,我们可以更好地理解和控制车辆的运动行为,在智能交通和智能驾驶等领域发挥重要作用。随着对车辆控制技术的不断深入研究,七自由度车辆模型的应用前景将会更加广阔。
【相关代码,程序地址】:http://fansik.cn/713986103578.html
















 969
969











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









