







最近玩的太狠了,适度学习...劳逸结合!
根据分类单元的不同,传统的遥感影像分类方法可分为面向像元和面向对象的分类。
1 面向像元的分类方法
1.1 定义
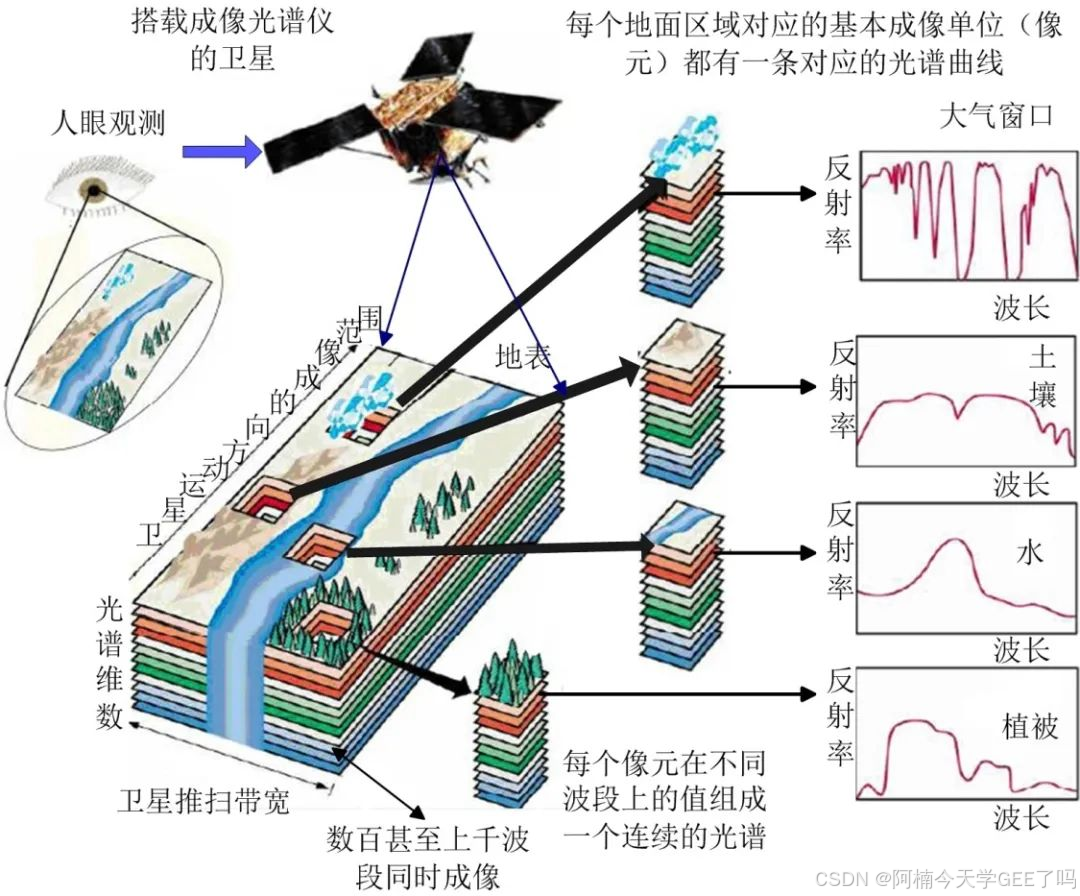
面向像元的分类方法(Pixel-based Classification, PBC),以单个像元的光谱特征为主要依据进行影像的分类,这种方法主要依赖于像元的光谱特征,而不考虑空间信息(如形状、纹理等),适用于低分辨率或中分辨率遥感影像。高分辨率遥感影像的光谱信息相对匮乏,纹理、几何等空间信息更加丰富;基于像元的方法解译速度较慢,容易产生椒盐效应,因此该方法不适用于高分辨率遥感影像分类。
像元的光谱特征:是指遥感影像中每个像元在不同波段上的反射率或辐射值。简单来说,就是传感器接收到的各个波段的电磁波信息,用于区分不同的地物类型。(详见学习记录10)
椒盐效应:由于分类方法仅依赖像元的光谱特征,导致分类结果出现大量孤立、分散的小斑块,使得图像看起来像撒上了黑白的“椒盐”,影响分类的连贯性和可读性。
1.2 特点
- 单像元决策:每个像元的类别是独立确定的,仅基于其光谱信息(即各波段的反射率值)。
- 依赖光谱特征:通常使用各个波段的灰度值或经过计算的光谱指数进行分类。
- 适用于多光谱和高光谱数据:尤其是在影像分辨率较低时,面向像元的方法仍然能有效分类。
- 忽略空间特征:没有考虑像元之间的空间关系、形状或纹理特征,因此在高分辨率影像中容易出现“椒盐噪声”现象。
1.3 主要算法
- 监督分类(Supervised Classification):
- 最大似然分类(Maximum Likelihood Classification, MLC):基于统计概率进行分类,假设各类别的光谱特征服从正态分布。
- 支持向量机(Support Vector Machine, SVM):使用超平面划分数据,适用于高维数据分类。
- 随机森林(Random Forest, RF):通过多个决策树进行投票,提高分类精度。
- 人工神经网络(Artificial Neural Network, ANN):基于神经网络的自学习能力进行分类。
- 非监督分类(Unsupervised Classification):
- K均值聚类(K-Means):基于数据点的相似性进行自动分类,不需要事先提供训练样本。
- ISODATA(Iterative Self-Organizing Data Analysis):与K均值类似,但可以动态调整聚类数量。
1.4 适用场景
- 低分辨率和中分辨率遥感影像(如MODIS、Landsat等)。
- 对光谱差异较大的地物(如水体、植被、裸地等)进行分类时效果较好。
- 适用于传统的土地利用/覆盖分类(LUCC)任务。
1.5 局限性
- 忽略空间信息:导致高分辨率影像分类精度下降。
- 易受噪声影响:可能出现“椒盐效应”(即分类结果呈现零星分布)。
- 光谱混合问题:对于具有相似光谱特征的地物(如不同类型的植被),分类精度可能较低。
2 面向对象的分类方法
2.1 定义
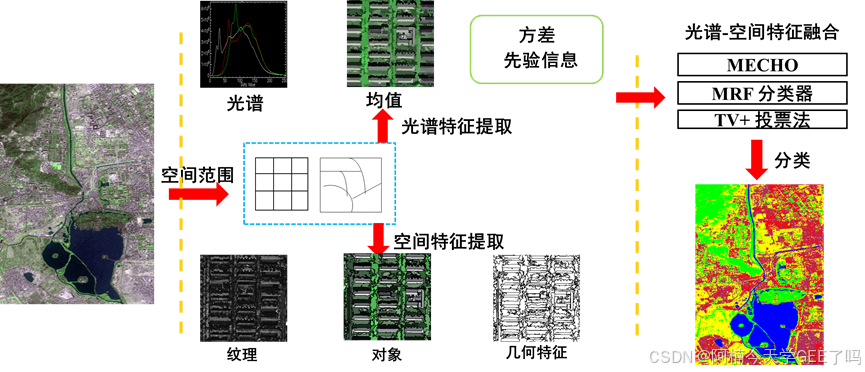
面向对象的分类方法(Object-Based Image Analysis, OBIA),以同质像元组成的对象为分类单元,对光谱、纹理和形状等特征进行提取进而分类,充分利用了像元之间的空间关系,是一种更适合于高分辨率遥感影像的分类方法。
2.2 特点
-
以对象为单位进行分类:不像传统方法逐个像元分类,OBIA 先进行影像分割,将相邻像元合并成对象,再基于对象的特征进行分类。
-
结合多种特征:光谱特征:均值、最大值、最小值、标准差等(如红光、近红外等波段的平均值)。形状特征:面积、周长、长宽比、圆度等(如建筑物通常是矩形,而湖泊边界较复杂)。纹理特征:均匀性、对比度、方向性等(如森林具有较均匀的纹理,而城市区域较复杂)。空间关系:对象与周围对象的拓扑关系(如建筑物通常靠近道路,水体通常位于低洼地区)。
-
减少椒盐效应:由于分类是基于区域而非单个像元,因此分类结果更加平滑,避免孤立像元被误分类的问题。
- 适用于高分辨率影像:在高分辨率遥感影像中,单个像元可能不足以描述完整地物,而面向对象方法能够更好地提取地物信息。
2.3 主要算法
(1)影像分割方法
影像分割是 OBIA 的关键步骤,常见方法包括:
- 多尺度分割(Multiresolution Segmentation):基于光谱相似性进行区域增长,适用于不同尺度的地物。
- 分水岭分割(Watershed Segmentation):将影像视为高程模型,基于梯度变化分割地物边界。
- 均值漂移分割(Mean Shift Segmentation):基于密度估计进行自适应平滑,适用于地物边界模糊的影像。
(2)分类方法
分割后,分类可采用机器学习或规则集方法,例如:
- 决策树(Decision Tree):基于设定的规则进行分类,适用于规则明确的地物。
- 随机森林(Random Forest, RF):集成多个决策树,提高分类精度和泛化能力。
- 支持向量机(Support Vector Machine, SVM):适用于复杂地物分类,能够有效处理小样本高维数据。
- K 近邻(K-Nearest Neighbors, KNN):基于对象相似性分类,计算量较大。
- 深度学习(如 CNN):近年来用于遥感影像分类,能够自动学习特征,提高精度。
2.4 适用场景
- 城市地物分类(建筑物、道路、水体、绿地等),能够保持地物边界完整性。
- 植被分类(区分不同植被类型,如阔叶林、针叶林、灌木丛等)。
- 农作物分类(利用形状和纹理特征区分不同作物)。
- 水体监测(识别河流、湖泊、水库等水体,减少混杂像元影响)。
- 灾害监测(如火灾、洪水、泥石流等灾害评估,提高准确性)。
2.5 局限性
- 计算量大,参数调整复杂:影像分割和分类计算成本较高,尤其在大规模遥感数据处理中需要较长时间。
- 依赖分割质量:影像分割的尺度参数、光谱相似性等设定不当,可能导致过度分割或欠分割,影响分类结果。
- 不适用于低分辨率影像:低分辨率影像中,像元本身已足以代表完整地物,使用 OBIA 可能没有优势。
- 需要高质量训练样本:分类精度受训练数据影响较大,如果训练样本质量不高,可能导致分类错误。
3 二者比较
像素级分类就像用“逐点填色”的方式画画,每个像素都被单独赋予类别,容易出现“椒盐噪声”。
面向对象分类更像是先画出轮廓(分割),再对每个整体对象进行分类,更符合人眼的认知。
面向像元分类像是盲人摸象,只能感知局部颜色(光谱),但不知道整体形状和关系。
面向对象分类像是站在远处看整幅画,不仅能看到颜色,还能看出形状、纹理和空间关系。
| 比较项 | 面向像元分类 | 面向对象分类 |
|---|
| 处理单元 | 单个像元(Pixel) | 多个像元组成的对象(Object) |
| 主要依据 | 像元的光谱特征(波段反射率) | 光谱 + 形状 + 纹理 + 关系 |
| 适用影像 | 低/中分辨率影像(如 Landsat, Sentinel-2) | 高分辨率影像(如 WorldView, UAV 影像) |
| 计算复杂度 | 计算较简单 | 计算较复杂,需要调整分割参数 |
| 适用场景 | 大尺度土地利用分类(如耕地、森林、水体) | 复杂地物分类(如城市建筑类型、不同植被) |
| 误分类情况 | 容易产生椒盐效应 | 结果更平滑,分类精度更高 |
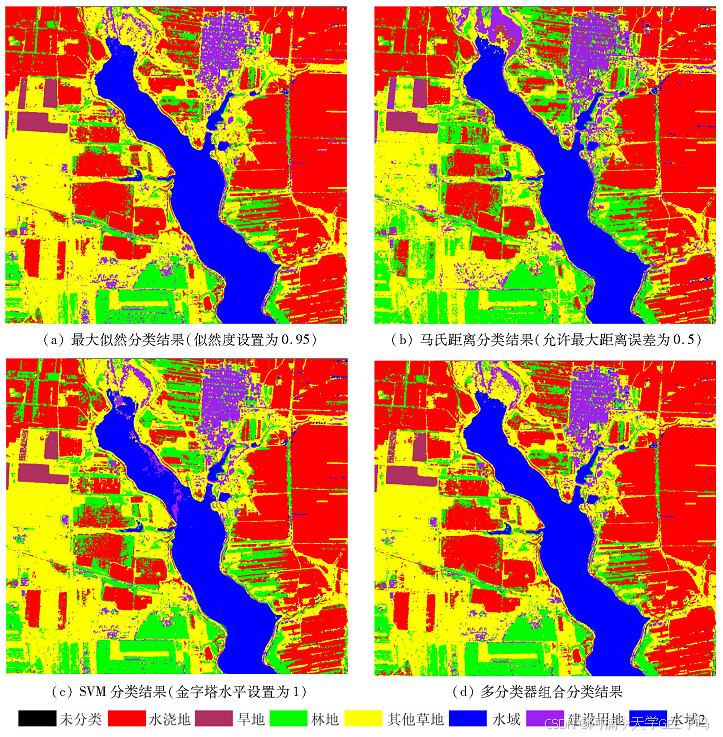
4 实例分析
基于 Sentinel-2 数据对青海湖流域进行地表分类:面向像元 vs 面向对象
假设目标是使用 Sentinel-2 影像对青海湖流域进行土地利用/覆盖(LULC)分类,将其划分为水体、裸地、草地、农田、建筑等类别。以下是两种方法的具体流程及对比。
4.1 应用面向像元的方法
面向像元的方法是逐像元进行分类,主要依赖光谱特征,不考虑像元间的空间关系。
步骤:
-
数据获取
- 下载 Sentinel-2 影像(L1C 或 L2A),选取覆盖青海湖的影像,并进行辐射校正、大气校正(如 Sen2Cor 处理)。
- 选取多个波段(如 B2 蓝、B3 绿、B4 红、B8 近红外等),并计算植被指数(NDVI)、水体指数(MNDWI)等增强信息。
-
数据预处理
- 影像裁剪到研究区范围(青海湖流域)。
- 可能需要进行云掩膜处理,去除云和云影干扰。
- 影像重采样至统一分辨率(如 10m)。
-
样本选择
- 通过 Google Earth 或已有土地利用数据标注训练样本(如水体、裸地、草地、农田、建筑)。
- 采用 ROI(Region of Interest)方法在 ArcGIS、ENVI 或 GEE 中采集训练数据。
-
分类模型选择
- 采用监督分类方法,如最大似然分类(MLC)、支持向量机(SVM)、随机森林(RF)等进行逐像元分类。
- 也可以使用无监督分类(如 K-means、ISODATA),根据光谱特征聚类后再人工赋值类别。
-
分类后处理
- 进行分类精度评估(基于混淆矩阵、总体精度、Kappa 系数等)。
- 可能需要应用多数滤波或形态学处理,去除椒盐效应。
4.2 应用面向对象的方法
面向对象的方法先进行影像分割,将相似的像元合并成对象,然后基于对象的光谱、形状、纹理等特征进行分类。
步骤:
-
数据获取(与 PBC 方法相同)
- 获取 Sentinel-2 影像,进行预处理(辐射校正、大气校正、裁剪、云掩膜)。
-
影像分割
- 采用多尺度分割方法(如 eCognition、GEE、ArcGIS)对影像进行分割,生成一系列地物对象。
- 选择合适的分割尺度:
- 若分割尺度过大,不同类别可能被混合。
- 若分割尺度过小,可能导致对象数量过多,影响计算效率。
- 根据研究需求,调整合适的光谱相似度、形状参数、紧致度等。
-
特征提取
- 计算每个对象的光谱特征(均值、标准差等)。
- 计算形状特征(面积、边界复杂度、长宽比等)。
- 计算纹理特征(灰度共生矩阵 GLCM 统计特征,如对比度、均匀度)。
- 计算空间关系特征(对象之间的邻近关系,如建筑是否紧邻道路)。
-
样本选择
- 选择训练样本(方法与面向像元分类相似,但样本单位为对象而非单个像元)。
-
分类模型选择
- 采用决策树、随机森林、支持向量机等机器学习方法进行分类。
- 也可以基于规则集(Rule-Based Classification),例如:
- 如果对象 NDVI > 0.3 且形状规则 → 草地。
- 如果对象 MNDWI > 0.5 且靠近湖泊 → 水体。
-
分类后处理
- 进行精度评估,并可进行对象合并、滤波等优化处理。
4.3 实例总结
- 若 Sentinel-2 数据分辨率较低(如 20m 波段),地物边界较模糊,适合面向像元的分类方法。
- 若 Sentinel-2 数据为 10m 波段,研究区内地物类型较复杂(如水体、裸地、草地混合),面向对象方法能更好地减少分类误差,提高精度。
- 如果计算资源有限,可选择面向像元方法;如果追求高精度分类(如城市地物分类),建议采用面向对象方法。
5 遥感影像分类方法的国内外研究现状
遥感影像分类是遥感应用中的核心任务,广泛应用于土地利用/覆盖分类(LULC)、生态环境监测、农业监测、城市规划等领域。随着遥感数据质量的提升和计算能力的增强,遥感分类方法不断发展,主要包括传统分类方法(面向像元的分类)、面向对象的分类(OBIA)以及基于深度学习的分类方法。
5.1 传统分类方法(面向像元分类)
(1)国外研究现状
早期的遥感分类主要依赖面向像元的统计方法,如最大似然分类(MLC)、支持向量机(SVM)、随机森林(RF)等。这些方法假设像元的光谱信息能代表地物类别,但由于忽略了空间信息,导致分类精度受限。
近年来,机器学习方法在遥感分类中得到广泛应用。例如:
- 支持向量机(SVM)被广泛应用于高分辨率遥感影像分类(Mountrakis et al., 2011)。
- 随机森林(RF)因其抗过拟合能力和高分类精度,被用于多光谱和高光谱影像分类(Belgiu & Drăguţ, 2016)。
- AdaBoost、K近邻(KNN)等方法也用于不同场景的分类任务(Foody, 2002)。
然而,这些方法仍然存在椒盐效应问题,导致分类结果较为破碎,尤其是在高分辨率影像中。
(2)国内研究现状
国内研究主要围绕提高传统方法的分类精度展开。例如:
- 研究者改进最大似然法,结合地形和地物先验知识,提高山区地物分类精度(王劲松等,2020)。
- 支持向量机(SVM)和随机森林(RF)在土地利用分类中得到了较多应用,研究者结合光谱指数(NDVI、MNDWI 等)提高分类精度(赵英等,2019)。
- 近年,一些研究尝试使用组合分类器(如 SVM + RF)来提高分类稳定性(李强等,2021)。
尽管面向像元的分类方法仍被广泛应用,但其对高分辨率影像的适用性有限,因此研究重心逐渐向面向对象的分类和深度学习分类转移。
5.2 面向对象的分类(OBIA)
(1)国外研究现状
面向对象分类方法(OBIA)于 2000 年左右兴起(Blaschke, 2010),其核心思想是先进行影像分割,再基于对象特征进行分类。OBIA 相较于传统方法,在高分辨率影像分类中表现更优。例如:
- eCognition 软件成为 OBIA 研究的主要工具,广泛应用于城市地物分类、林地分类等领域(Blaschke & Lang, 2006)。
- 国外研究者提出多种影像分割算法,如多尺度分割(Multiresolution Segmentation)、分水岭分割(Watershed Segmentation),并结合机器学习分类器(RF、SVM)提高分类精度(Drăguţ et al., 2014)。
- OBIA 被用于灾害监测(火灾、洪水等),如 Liu et al. (2018) 采用 OBIA 结合光谱指数对森林火灾区域进行了高精度分类。
(2)国内研究现状
国内在 OBIA 领域的研究起步稍晚,但近年来发展迅速。例如:
- 研究者利用 OBIA 进行城市土地利用分类,结合高分辨率影像(如 GF-2、高光谱数据)提高分类精度(李涛等,2019)。
- 农业监测方面,研究者利用 OBIA 方法提取农作物种植结构,并结合深度学习提高识别能力(张勇等,2022)。
- 生态环境监测领域,OBIA 被用于提取草地、裸地、水体等地物,并与 GIS 结合进行动态变化分析(王芳等,2021)。
虽然 OBIA 在高分辨率影像中的表现优异,但其计算成本较高,参数调整复杂,成为研究中的主要挑战。
5.3 基于深度学习的分类方法
(1)国外研究现状
近年来,深度学习(DL)在遥感影像分类中取得突破性进展。常见方法包括:
- 卷积神经网络(CNN):用于提取影像的深层特征,提高分类精度(Zhang et al., 2016)。
- 循环神经网络(RNN):适用于时序遥感数据分类,如农业作物分类(Ienco et al., 2017)。
- Transformer 模型:最近在遥感分类中取得显著进展,特别适用于长距离依赖特征的建模(Dosovitskiy et al., 2020)。
国外研究者开发了多种遥感深度学习框架,如:
- DeepLabV3+、U-Net 等语义分割模型在地物分类中的应用(Chen et al., 2018)。
- 结合 LSTM 进行时间序列分类,提高农作物分类精度(Russwurm et al., 2019)。
(2)国内研究现状
国内研究者也积极探索深度学习在遥感分类中的应用:
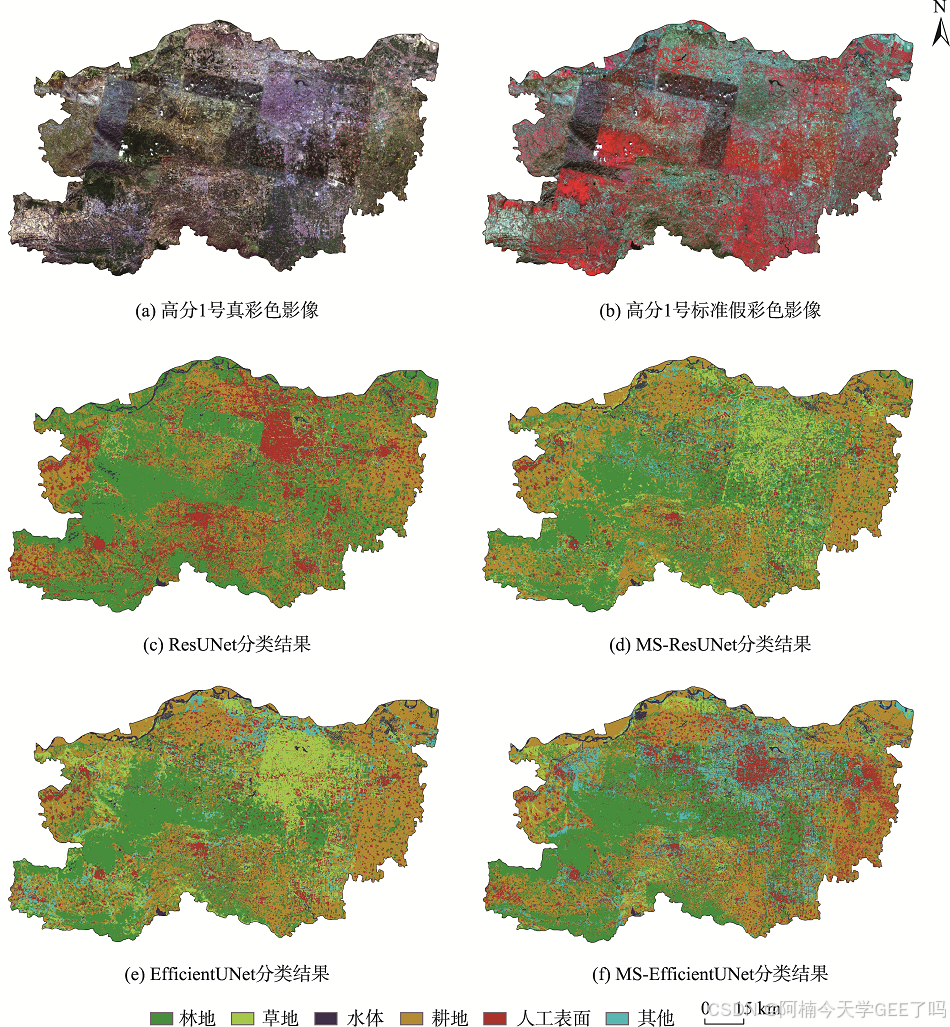
- CNN 在高分辨率遥感影像分类中的应用:如利用 ResNet、DenseNet 提取特征,提高分类精度(王伟等,2021)。
- 结合 OBIA 进行分类:如 OBIA + CNN 方法,先进行影像分割,再使用深度学习进行分类,提高计算效率(张鹏等,2022)。
- 多源数据融合:结合多光谱、SAR(合成孔径雷达)、LiDAR 数据,提高遥感分类的综合能力(李娜等,2023)。
尽管深度学习在遥感分类中表现优异,但其计算资源需求高、可解释性差,仍然是当前研究的热点问题。
5.4 研究趋势与展望
- 多源数据融合:结合光学、SAR、高光谱、激光雷达等多种遥感数据,提高分类精度。
- 深度学习与 OBIA 结合:利用深度学习优化影像分割,提高面向对象分类的智能化水平。
- 自监督学习与少样本学习:解决遥感影像分类中高质量样本标注困难的问题。
- 云计算与大数据分析:GEE(Google Earth Engine)、HPC(高性能计算)等技术的应用将进一步推动遥感分类的高效化和自动化。
5.5 结论
遥感影像分类方法经历了从传统面向像元分类(MLC、SVM、RF),到面向对象分类(OBIA),再到深度学习方法(CNN、Transformer)的发展。传统方法在低分辨率影像中仍具备应用价值,而 OBIA 适用于高分辨率影像,深度学习方法则表现出更强的特征提取能力。未来的发展方向将围绕多源数据融合、智能分类方法及计算资源优化展开。
图片均来自网络,如有侵权,请联系删除。

















 444
444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









