







本篇内容在熟知51单片机与C语言基础上编写
一,开发板介绍和引脚图
USB接口用于下载程序,电源输入和烧录驱动等等。BOOT启动模式选择,按下为下载模式,放开为运行模式。ESP-32-WROOM-32模组集成了蓝牙,wifi等模块

共48个引脚。但并不是所有引脚都暴露在外面,有些引脚不能使用就没有暴露出来。这个单片机就只有30个引脚。ESP32芯片有34个可编程的GPIO引脚,每个引脚执行多个功能

二,开发方式

三,编程基础
在Arduino IDE中变量的声明必须放在文件开始。Arduino支持的变量类型有int float char bool string等
Arduino中的void setup()函数是在开发板通电或者复位后执行的初始化程序(比如配置IO口状态,初始化串口等等),只会执行一次。void loop(){}函数是一个死循环,里面的程序会不断执行
Arduino常见函数介绍:

四,Arduino控制ESP32GPIO口输入输出
ESP32上D开头的引脚就是GPIO引脚,只是输入和输出两种模式
1,输出模式
以下为LED闪烁实验代码
int led_pin = 12;
void setup()
{
pinMode(led_pin, OUTPUT);
}
void loop()
{
digitalWrite(led_pin, HIGH);
delay(1000); //1s
digitalWrite(led_pin, LOW);
delay(1000);
}点亮流水灯
int pin_list[5] = {13, 12, 14, 27, 26};
int len = sizeof(pin_list) / sizeof(pin_list[0]); //数组长度
void setup()
{
for(int i=0;i<num;i++)
{
pinMode(pin_list[i], OUTPUT);
}
}
void loop()
{
for(int i=0;i<num;i++)
{
digitalWrite(pin_list[i], HIGH);
delay(50);
}
for(int i=0;i<num;i++)
{
digitalWrite(pin_list[i], LOW);
delay(50);
}
}2,输入模式
设置引脚的输入模式pinMode(1, INPUT)
设置为上拉输入模式pinMode(1, INPUT_PULLUP)
设置为下拉输入模式pinMode(1, INPUT_PULLDOWN)
五,数码管
数码管按照显示位数分为1位,2位,3位,4位,5位,6位,7位等数码管。其基本单元仍然是LED
按发光二极管的连接方式可分为共阳极数码管和共阴极数码管。在数码管引脚图中,COM就是公共端,共阴数码管这个COM端接地,共阳数码管接电源正极,剩下的abcdefg被称为段选线,分别对应不同位置的LED。

1,一位数码管
接线
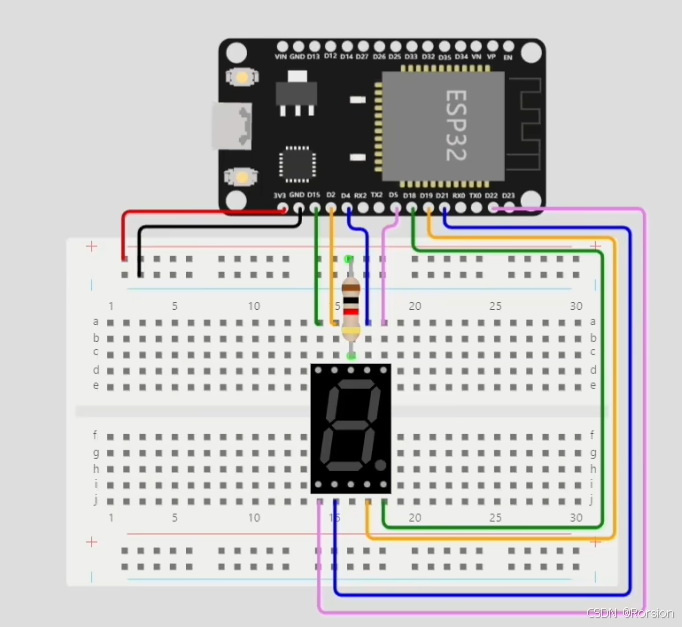
int pin_a = 4;
int pin_b = 5;
int pin_c = 19;
int pin_d = 21;
int pin_e = 22;
int pin_f = 2;
int pin_g = 15;
int pin_dp = 18;
//定义存放所有输出引脚的数组
int pin_array[8] = {pin_a, pin_b, pin_c, pin_d, pin_e, pin_f, pin_g, pin_dp}
//定义数字显示逻辑的二维数组
int number_array[][8] =
{//a,b,c,d,e,f,g,dp
{0, 0, 0, 0, 0, 0, 1, 1},//0
{1, 0, 0, 1, 1, 1, 1, 1},//1
{0, 0, 1, 0, 0, 1, 0, 1}//2
//以及3 4 5 6 7 8 9几个数字,这里就不一一列举了
};
//定义显示数字的函数
void display_number(int num)
{
for(int i=0;i<8;i++)
{
digitalWrite(pin_array[i], number_array[num][i]);
}
}
void setup()
{
for(int i=0;i<8;i++)
{
pinMode(pin_array[i], OUTPUT);
digitalWrite(pin_array[i], LOW);//初始化所有引脚为高电平,即默认不亮
}
}
void loop()
{
display_number(2);//显示数字2
}2,四位数码管
(1)原理


1位数码管有两个相同的公共(COM)端,而4位数码管没有公共端,但是有四个控制不同位置显示的选通端。如下图,SEG1 SEG2 SEG3 SEG4就是四个独立的选通端(也可以看作公共端),SEG1就是控制第一个数码管亮灭,SEG2控制第二个。选通端是相互独立的,而负责显示数字的段选线是接到一起的。 一位数码管10个引脚,四位数码管12个引脚

下图所示的D0 D1 D2 D3就是选通端(位选线),也就是四位数码管的公共端,相互独立。上面的八根段选线全都是接到一起的。独立的公共端决定哪一个数码管点亮,连在一起的段选线控制点亮的数码管亮什么数字

接线图


(2)静态显示
// 定义位选线引脚
int seg_1 = 5;
int seg_2 = 18;
int seg_3 = 19;
int seg_4 = 21;
// 定义位选线数组;
int seg_array[4] = {seg_1, seg_2, seg_3, seg_4};
// 定义段选线引脚
int a = 32;
int b = 25;
int c = 27;
int d = 12;
int e = 13;
int f = 33;
int g = 26;
int dp = 14;
// 定义段选线数组
int led_array[8] = {a, b, c, d, e, f, g, dp};
// 定义共阴极数码管不同数字对应逻辑电平的二维数组
int logic_array[10][8] = {
//a, b, c, d, e, f, g, dp
{1, 1, 1, 1, 1, 1, 0, 0}, // 0
{0, 1, 1, 0, 0, 0, 0, 0}, // 1
{1, 1, 0, 1, 1, 0, 1, 0}, // 2
{1, 1, 1, 1, 0, 0, 1, 0}, // 3
{0, 1, 1, 0, 0, 1, 1, 0}, // 4
{1, 0, 1, 1, 0, 1, 1, 0}, // 5
{1, 0, 1, 1, 1, 1, 1, 0}, // 6
{1, 1, 1, 0, 0, 0, 0, 0}, // 7
{1, 1, 1, 1, 1, 1, 1, 0}, // 8
{1, 1, 1, 1, 0, 1, 1, 0}, // 9
};
void setup() {
// 设置所有的位选线引脚为输出模式,初始化所有的位选线引脚为高电平
for (int i=0;i<4;i++) {
pinMode(seg_array[i], OUTPUT);
digitalWrite(seg_array[i], HIGH);
}
// 设置所有的段选线引脚为输出模式,初始化所有的段选线引脚为低电平
for (int i=0;i<8;i++){
pinMode(led_array[i], OUTPUT);
digitalWrite(led_array[i], LOW);
}
}
void loop() {
// display_number(2, 4);
// delay(1000);
// 按顺序让所有位置显示0-9
for (int i=0;i<4;i++) {
for (int j=0;j<10;j++) {
display_number(i, j);
delay(200);
}
}
}
void display_number(int order, int number) {
// 清屏
clear();
// 设置对应的位选线引脚为低电平
digitalWrite(seg_array[order], LOW);
// 给对应的段选线引脚设置对应的电平
for (int i=0;i<8;i++) {
digitalWrite(led_array[i], logic_array[number][i]);
}
}
void clear(){
// 设置所有的位选线引脚为输出模式,初始化所有的位选线引脚为高电平
for (int i=0;i<4;i++) {
pinMode(seg_array[i], OUTPUT);
digitalWrite(seg_array[i], HIGH);
}
// 设置所有的段选线引脚为输出模式,初始化所有的段选线引脚为低电平
for (int i=0;i<8;i++){
pinMode(led_array[i], OUTPUT);
digitalWrite(led_array[i], LOW);
}
}(3)动态显示
动态扫描是对位选线进行扫描,通过刷新位选线来实现显示多个数字的效果
// 定义位选线引脚
int seg_1 = 5;
int seg_2 = 18;
int seg_3 = 19;
int seg_4 = 21;
// 定义位选线数组;
int seg_array[4] = {seg_1, seg_2, seg_3, seg_4};
// 定义段选线引脚
int a = 32;
int b = 25;
int c = 27;
int d = 12;
int e = 13;
int f = 33;
int g = 26;
int dp = 14;
// 定义段选线数组
int led_array[8] = {a, b, c, d, e, f, g, dp};
// 定义共阴极数码管不同数字对应逻辑电平的二维数组
int logic_array[10][8] = {
//a, b, c, d, e, f, g, dp
{1, 1, 1, 1, 1, 1, 0, 0}, // 0
{0, 1, 1, 0, 0, 0, 0, 0}, // 1
{1, 1, 0, 1, 1, 0, 1, 0}, // 2
{1, 1, 1, 1, 0, 0, 1, 0}, // 3
{0, 1, 1, 0, 0, 1, 1, 0}, // 4
{1, 0, 1, 1, 0, 1, 1, 0}, // 5
{1, 0, 1, 1, 1, 1, 1, 0}, // 6
{1, 1, 1, 0, 0, 0, 0, 0}, // 7
{1, 1, 1, 1, 1, 1, 1, 0}, // 8
{1, 1, 1, 1, 0, 1, 1, 0}, // 9
};
// 清屏函数
void clear(){
for (int i=0;i<4;i++) {
digitalWrite(seg_array[i], HIGH);
}
for (int i=0;i<8;i++){
digitalWrite(led_array[i], LOW);
}
}
// 显示数字的函数
void display_number(int order, int number) {
// 清屏
clear();
// 把对应位选线的电平拉低
digitalWrite(seg_array[order], LOW);
// 显示数字
for (int i=0;i<8;i++) {
digitalWrite(led_array[i], logic_array[number][i]);
}
}
// 4 位数码管显示函数
void display_4_number(int number) {
// 把输入的数字转化为 4 位数的数组
if (number < 10000){
// 获取每一位对应的数字
/*
4567
4567 % 10 = 7
4567 / 10 = 456
456 % 10 = 6
456 / 10 = 45
45 % 10 = 5
45 / 10 = 4
4 % 10 = 4
1
1 % 10 = 1
1 / 10 = 0
*/
// 定义格式化数组
int number_array[4];
// 使用循环获取数组元素
for (int i=3;i>=0;i--) {
number_array[i] = number % 10;
number /= 10;
}
// 显示 4 位数字
for (int i=0;i<4;i++) {
display_number(i, number_array[i]);
delay(5);
}
}
}
void setup() {
// 设置所有的位选线引脚为输出模式,初始化所有的位选线引脚为高电平
for (int i=0;i<4;i++) {
pinMode(seg_array[i], OUTPUT);
digitalWrite(seg_array[i], HIGH);
}
// 设置所有的段选线引脚为输出模式,并初始化为低电平
for (int i=0;i<8;i++){
pinMode(led_array[i], OUTPUT);
digitalWrite(led_array[i], LOW);
}
}
void loop() {
display_4_number(9876);
}六,PWM输出
使用ESP32的LEDC外设,LEDC外设专门用于输出PWM波形,LED PWM这个控制器可以生成16路通道(0~15),波形的频率和占空比可以配置。按照驱动时钟的频率分为高低两组,高速通道是0~7,由80MH时钟驱动,低速通道是8~15,由1MHz时钟驱动。另外,每路LED PWM支持自动步进式的增加或者减少占空比,可用于LED RGB彩色梯度发生变化
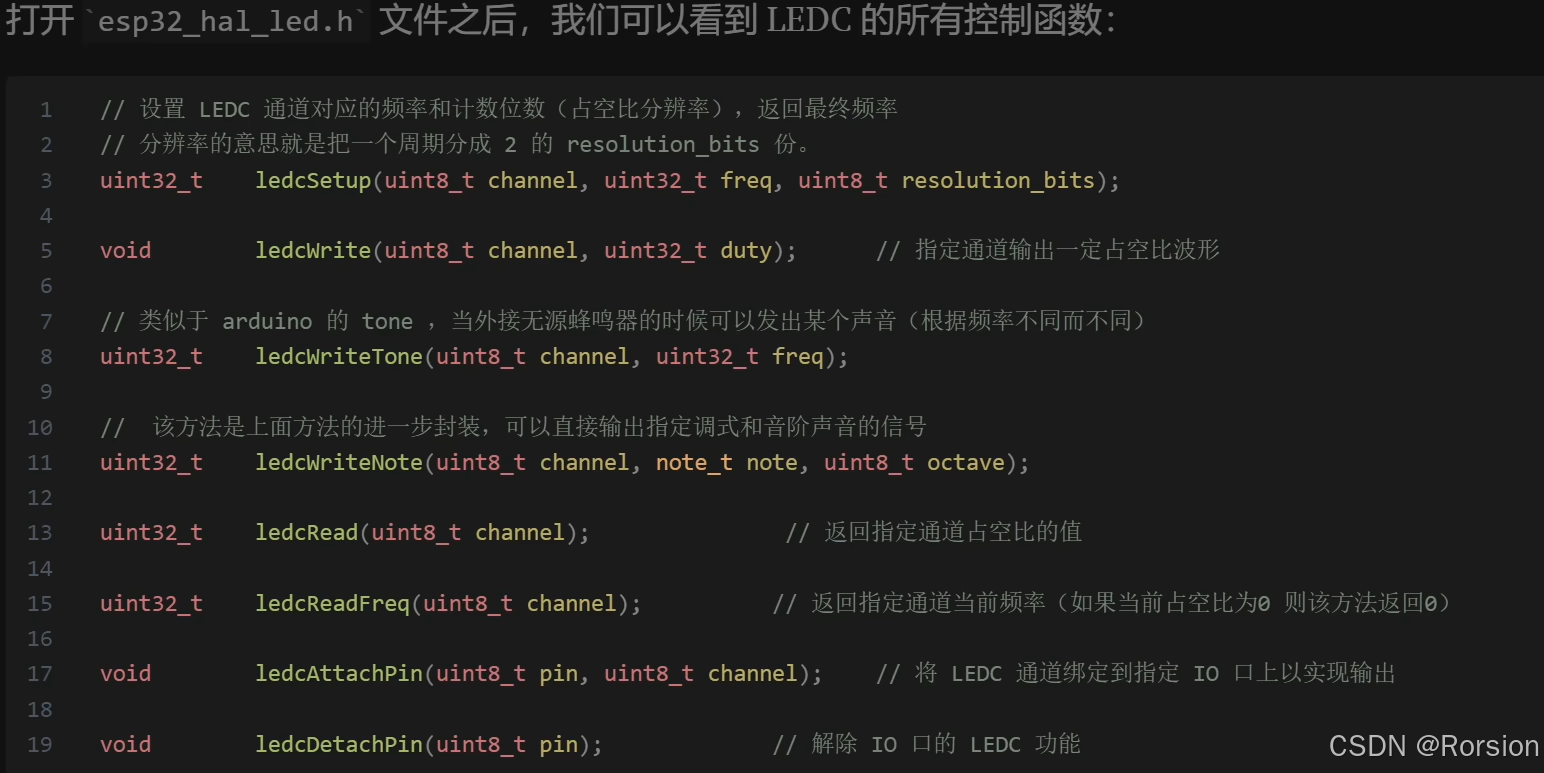
结合下图图像看各函数
ledcSetup();函数,用来设置LEDC通道对应的频率和分辨率,返回值为最终的频率。分辨率的意思就是将一个周期等分成2的resolution_bits的平方份,比如我们传入的分辨率是8,那就是2的8次方,256,256对应了占空比0~100%
ledcWrite();函数,用来指定通道输出一定的占空比波形。输入参数范围为0到2的resolution_bits次方-1
ledcWriteTone()和ledcWriteNote。这两个函数作用是使蜂鸣器发声的
ledcRead();返回指定通道占空比的值
ledcReadFreq();返回指定通道当前频率(如果当前占空比为0,则该方法返回0)
ledcAttachPin();将LEDC通道绑定到指定的GPIO口。ESP32中只有部分引脚可以被绑定到PWM控制器通道上,具体哪个引脚需要查看手册
ledcDetachPin();解绑
ESP32 的 LEDC 模块具有多个通道,每个通道可以被配置为产生一个 PWM 信号。这些通道可以被映射到不同的 GPIO 引脚(以 “D” 开头的引脚)上。
LEDC产生PWM的过程一般为以下步骤
- 使用ledcSetup()函数建立LEDC通道
- 使用ledcAttachPin()将GPIO口与LEDC通道关联
- 通过ledcWrite() ledcWriteTone() ledcWriteNote设置频率,设置蜂鸣器音调等
- 使用完成后,通过ledcDetachPin()解除GPIO口与LEDC通道的关联
代码示例
#include <Arduino.h>
// 定义要使用的数字引脚,例如 D2
const int pwmPin = 2;
void setup() {
// 配置引脚为PWM输出模式
ledcSetup(0, 5000, 8);
// 将引脚与PWM通道绑定
ledcAttachPin(pwmPin, 0);
}
void loop() {
// 设置PWM占空比,范围是 0 到 255
ledcWrite(0, 128);
delay(1000);
}也可以通过analogWrite来实现PWM输出
ESP32 中的 analogWrite 函数是通过调用 LEDC 模块的相关函数实现的,当调用 analogWrite 函数时,它会先检查是否已经为该引脚配置了相应的 LEDC 通道。如果没有,它会调用 ledcSetup 函数来配置一个通道,然后调用 ledcAttachPin 函数将指定的 GPIO 引脚(以 “D” 开头的引脚)映射到已配置的 LEDC 通道。通过配置通道、映射引脚和设置占空比来产生 PWM 信号,从而实现模拟控制效果。使用时需要注意通道的数量有限,不同引脚可能有不同的功能复用,在使用前最好查阅 ESP32 的官方文档,以确保所使用的引脚可以被配置为 PWM 输出,并且满足所需的频率和分辨率要求。同时,根据具体应用场景选择合适的频率和分辨率,以达到最佳的控制效果。
以下为调用analogWrite的简单示例,可以看到使用analogWrite不需要再配置LEDC等通道的函数,而是直接调用,但是使用analogWrite 函数,ESP32 通常会使用默认的 PWM 频率,约为 500Hz其占空比的范围为0~255,255时输出电压最大,一般为3.3V
#include <Arduino.h>
const int ledPin = 2; // 定义 LED 连接的引脚
void setup() {
pinMode(ledPin, OUTPUT); // 将引脚设置为输出模式
}
void loop() {
analogWrite(ledPin, 128); // 输出 PWM 信号,占空比为 50%(255 的一半)
delay(1000); // 延迟 1 秒
}七,ADC控制
1,analogWrite和analogRead实现ADC
使用PWM输出电压值类似于模拟信号输出,如果需要使用ESP32检测外部输入的模拟信号就要使用ADC模数转换器,通过ADC将模拟信号转换为数字信号

ADC模数转换器可以将模拟信号转换为数字信号。由于单片机只能识别二进制数字,所以外界模拟信号常常会通过ADC转换成可以识别的数字信号,常见的应用就是将变化的电压转成数字信号。需要注意的是,我们在使用ADC默认配置的时候,ADC引脚的输入电压必须是介于0到1之间,任何高于1V的电压都会视为一个最高值,如果需要增加测量范围需要配置一下衰减器。
int value; //存放输入模拟值
void setup()
{
Serial.begin(9600);// 设置串口通信波特率
pinMode(26, INPUT);// 26号引脚输入模拟量
}
void loop()
{
//读取模拟输入值
value = analogRead(26); // analogRead范围是0~4095
Serial.println(value); //打印数据到串口监视器
delay(50);
}2,使用ADC模拟通道输入

ADC模块它的读取方式和analogRead()是一致的
在 ESP32 中,adcAttachPin 函数主要用于将一个 GPIO 引脚配置为模拟输入引脚并关联到 ADC(模拟数字转换器)通道。它是 ESP32 提供的用于 ADC 操作的高级函数之一,方便用户将物理引脚与 ADC 通道相连接,以便后续使用 analogRead 等函数进行模拟信号的读取和处理。adcAttachPin 函数可以让你使用一些普通的 GPIO 引脚进行模拟信号的读取,但其性能可能会受到限制,如更高的噪声、更低的精度和更慢的采样速度,因为这些引脚并非专门为 ADC 设计。对于ESP32中专门的ADC引脚,可以不用analogAttachPin函数来映射而直接使用 analogRead读取即可,在大多数情况下,对于 ESP32 的 ADC 引脚(如 32 到 39 号引脚),analogRead 函数可能会自动处理引脚与 ADC 通道的映射关系,因此可以直接使用 analogRead 函数读取模拟输入信号。虽然对于专门的 ADC 引脚可能暂时可行,但为了确保代码的可靠性和可移植性,建议使用 adcAttachPin 函数进行明确的配置,特别是在复杂的项目中或当需要对多个 ADC 引脚进行操作时。
#define POT 26
#define LED 13
#define CHANNEL 0
#define RESOLUTION 12
#define FREQ 1000
int pot_value;
void setup()
{
// 设置ADC分辨率
analogReadResolutin(RESOLUTION);//默认也是12,所以可以不写这行代码
// 配置输入衰减
analogSetAttenuation(ADC_11db);//默认也是ADC_11db,所以这行代码可以不写
// 建立LEDC通道,配置LEDC分辨率
ledcSetup(CHANNEL, FREQ, RESOLUTION);
// 关联GPIO与LEDC通道
ledcAttachPin(LED, CHANNEL)
}
void loop()
{
// 获取模拟信号输入值
pot_value = analogRead(POT);
// 输出PWM
ledcWrite(CHANNEL, pot_value);
delay(50);
}当你使用 analogReadResolution 函数和analogSetAttenuation函数修改分辨率和输入衰减后,后续调用的 analogRead 函数将使用新设置的分辨率和输入衰减进行模拟值的读取,直到你再次使用 analogReadResolution 函数和analogSetAttenuation函数更改分辨率和输入衰减值。
八,I2C驱动LCD1602显示屏
1602液晶显示屏的称呼来自于其显示的内容容量,其中的16代表每行可显示的最大字符数或数字,02代表屏幕一共两行,实际开发中根据需要显示信息的内容选择液晶显示屏,还可以选用2004屏等
1602除了电源,地以外,有3个控制引脚RS R/W E和8个数据引脚DB0-7

由于1602管脚过多,如果直接和ESP32单片机连接的话会占用大量引脚,实际使用时往往会给1602加一块I2C驱动板,将1602的16个管脚连接到由PCF8574T作为主要芯片的驱动板上,将接口转为I2C再连接开发板
根据ESP32的引脚定义图,选择I2C 的SCL和SDA引脚连接。以下为硬件连接图


Arduino中要使用I2C控制LCD1602需要下载第三方代码LiquidCrystal_I2C,其中包含LiquidCrystal_I2C.h和LiquidCrystal_I2C.cpp文件,然后将这两个文件放到项目文件夹即可。
需要注意的是,在Arduino开发中的.h和.cpp文件的约定与传统C++开发并不完全相同,Arduino IDE在编译的过程中会将.ino文件转换成.cpp文件,并且将其中的代码放置在全局范围,因此在Arduino项目中.ino文件也可以包含全局变量函数,而不仅限于.cpp文件

以下为库的函数

显示hello world代码示例
#include"LiquidCrystal_I2C.h"
//构造LCD对象,设置地址,列数,行数
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup()
{
lcd.init();
//先打开背光
lcd.backlight();
lcd.print("hello world");
}
void loop()
{
}通过串口发送数据并显示示例
//Serial.available();//返回串口缓冲区中剩余字符个数,一般用此函数判断串口缓冲区是否还有数据
//Serial.read();//从串口缓冲区读取一个字节的数据。有设备向Arduino发送数据,就可以通过此函数读取
//内容
#include"LiquidCrystal_I2C.h"
//构造LCD对象
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup()
{
lcd.init();
lcd.backlight();
Serial.begin(9600);//开启串口通信
lcd.print("hello world");
}
void loop()
{
//检测是否有串口输入
if(Serial.available())
{
//延时100ms等待所有的数据传输完成
delay(100);
//清屏
lcd.clear();
//反复读取串口缓冲区的数据,并显示在屏幕上
while(Serial.available()){
lcd.write(Serial.read());
}
}
}九,在VSCode中使用PlatformIO开发
PlatformIO是一个开源的跨平台的物联网(IoT)开发平台,用于嵌入式系统和物联网设备的开发,它提供了一个统一的开发环境和工具链,支持多种硬件平台,如Arduino,ESP32,ESP8266,树莓派等等,支持多个开发框架,比如Arduino开发框架,ESP32-IDF,STM32,CUBE等等

下载VSCode并在里面下载PlatformIO插件即可
点击左下角房子标志(红框所示)即可进入到主页


点击New Project创建项目。输入项目名称,选择开发板型号(我们选择Espressif ESP32 Dev Module),开发框架为Arduino,Location是安装路径,勾选为安装到默认路径,可以取消勾选指定一个路径

安装完成后如下界面

最下边的蓝框工具栏就多出了几个选项。对勾Build是编译,箭头Upload是上传,将代码上传到单片机,垃圾桶是clean,锥形瓶是test,插头Serial Monitor为串口监视器,右边是终端,Auto是选择串口(连接后会自动检测)
![]()
我们的test项目共有6个文件夹和.gitignore文件和platformio.ini文件。.pio文件是PlatformIO的工作目录,包括编译生成的二进制文件,日志文件等等;.vscode是在VSCode中使用PlatformIO插件才会有的,这个文件包含了与这个项目相关的配置文件,比如任务配置,调试配置等等;include文件存放头文件;lib文件是用于存放项目依赖的库文件的,可以通过PlatformIO的库管理器安装所需要的库,并且会自动下载到这个文件;src问价来存放源代码的主要目录;test目录来存放项目的测试代码和测试数据的,这个目录经常用来编写单元测试或者集成测试的一些代码;.gitignore文件,如果使用了版本控制工具比如git进行项目管理,就可以在此文件中指定需要忽略上传的文件和文件夹,这个文件的作用简单来说就是如果你想要把自己的文件上传的github或者gitee时,像.vscode .pio这种文件是不需要上传的,所以就需要在.gitignore文件中将这些需要忽略的文件路径写入;platformio.ini文件是PlatformIO的配置文件,用于指定项目的配置选项,比如项目的开发平台,开发板 ,开发框架等

下面演示如何在PlatformIO里安装库,以LiquidCrystal_I2C库为例。回到主页点击Libraries
之后直接在里面搜索
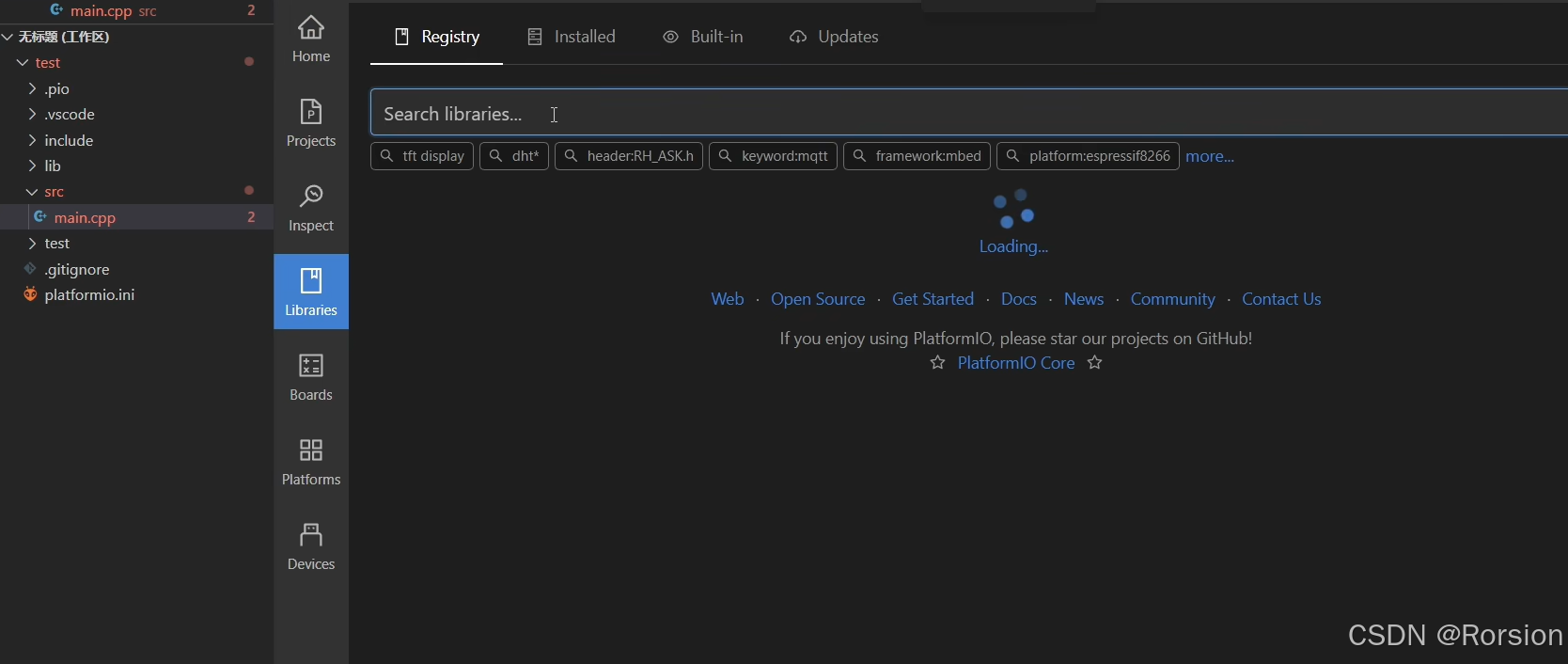
搜索出来之后,直接下载第一个即可 。

点击进入库。

然后点击Add to Project,出现如下界面,选择要安装的项目即可

如果要查看某个头文件的代码内容或者某个函数内容,按住ctrl键点击即可
十,SPI控制OLED
1,SPI简介



2,OLED简介与硬件连接
这节课使用的OLED是0.96寸的SSD1306芯片驱动的OLED显示屏,分辨率是128*64,有7个引脚,属于三线SPI接口,但是可以通过原理图改变电阻位置将其改装成4线SPI或者I2C接口。


3,程序设计

Adafruit_SSD1306
SSD1306包括I2C给SPI总线版本,所以针对不同版本又有对应的构造器方法。这里只说明SPI总线的构造方法,SPI总线也分为两种,一种是软件模拟I2C,第二种是硬件SPI。
第一个参数uint8_t w指屏幕宽度;第二个参数uint8_t h指高度;软件SPI第三个参数和第四个参数分别是MOSI和SCLK,可以任意指定两个IO引脚,硬件SPI第三个参数SPIClass*spi指定了地址,我们需要使用对应的引脚;接下来三个参数都是da_pin rst_pin cs_pin就没区别了

1,软件SPI
软件SPI构造对象如下。声明Adafruit_SSD1306类,声明对象的名字叫oled,括号里填写对应的参数

2,硬件SPI

3,函数使用


4,程序示例(静态图像)
- 初始化OLED,调用构造函数,调用begin方法
- 初始化成功后,调用绘制类函数,当然可以设置颜色,字体等
- 绘制完毕,调用显示类函数display
#include <Arduino.h>
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define WIDTH 128
#define HEIGHT 64
#define OLED_MOSI 13
#define OLED_SCK 18
#define OLED_DC 2
#define OLED_CS 4
#define OLED_RESET 15
//构造对象
Adafruit_SSD1306 oled(WIDTH, HEIGHT, OLED_MOSI, OLED_SCK, OLED_DC, OLED_RESET, OLED_CS);
void setup()
{
//初始化
oled.begin();
//清除显示
oled.clearDisplay();
//绘制水平线。参数可以跳转到函数查看
oled.drawFastHLine(32, 5, 48, SSD1306_WHITE);
//绘制斜线
oled.drawLine(32, 5, 48, 30, SSD1306_WHITE);
//绘制空心矩形
oled.drawRect(5, 5, 10, 25, SSD1306_WHITE);
//绘制实心矩形
oled.fillRect(75, 5, 10, 30, SSD1306_WHITE);
//设置文本颜色。文本颜色默认为黑色,在OLED显示屏上看不到,所以先设置颜色
oled.setTextColor(SSD1306_WHITE)
//设置光标位置。更改光标位置也就改变了文本显示初始位置
oled.setCursor(5, 50);
//设置字体大小
oled.setTextSize(2);
//显示文字。使用SSD1306第三方库的话无法显示中文,除非用drawPixel()自己一个个地画点
oled.println("hello");
//显示内容
oled.display();
}
void loop()
{
}
5,程序示例(动态图像)
实现如下进度条加载效果

#include <Arduino.h>
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define WIDTH 128
#define HEIGHT 64
#define OLED_MOSI 13
#define OLED_SCK 18
#define OLED_DC 2
#define OLED_CS 4
#define OLED_RESET 15
//构造对象
Adafruit_SSD1306 oled(WIDTH, HEIGHT, OLED_MOSI, OLED_SCK, OLED_DC, OLED_RESET, OLED_CS);
int length = 0;//进度条长度
void setup()
{
//初始化
oled.begin();
//设置文本颜色。文本颜色默认为黑色,在OLED显示屏上看不到,所以先设置颜色
oled.setTextColor(SSD1306_WHITE)
//设置字体大小
oled.setTextSize(2);
}
void loop()
{
//清除显示
oled.clearDisplay();
//设置光标位置
oled.setCursor(15, 40);
//显示文字
ole.println("Progress");
//显示进度条边框。圆角矩形
oled.drawRoundRect(0, 10, 128, 20, 5,SSD1306_WHITE);
//进度递增
if (length< 118){
length++;
}else
{
length = 0;
}
//显示进度
oled.fillRoundRect(5, 15, length, 10, 2, SSD1306_WHITE);
oled.display();
}
U8G2
1,介绍
U8G2是Arduino平台上使用最广泛的OLED库。

因为U8G2库兼容很多版本的驱动以及不同尺寸的OLED,所以它的构造方法有很多,我们需要跟根据自己的OLED型号选择适合我们的构造方法

在PlatformIO地Libraries搜索U8G2,然后Add到项目中。使用时需要导入头文件#include<u8g2lib.h>
要使用这个库先要根据自己的OLED型号构造对象
按住ctrl,点击u8g2lib进入到头文件中。拉到注释有/*Arduino constructor list start */的位置,这就到了构造器列表

构造器命名规则。SSD1306是驱动芯片名,128X32是屏幕大小,1是缓存大小,4W_SW_SPI是总线,4W指的是四线,使用四线传递参数时需要传递时钟线,数据线,CS,DC和RESET,总线的SW和HW分别指软件SPI和硬件SPI


2,库函数
初始化相关函数
绘制相关函数

显示配置相关函数

缓存相关函数

3,绘制模式

分页模式不需要要求构造器必须带F了,1 2 F都可以使用 。do while循环体条件nextPage()是来判断是否有下一页的,如果有下一页则进入下一页并返回True,没有下一页就是False;如果使用F构造器就只有一页,所以它不会进入下一页,循环也就只能执行一次
还有一种普通文本模式,这种模式下只能打字,不能实现一些其他操作。
4,代码示例(全屏缓存模式显示汉字)
#include <Arduino.h>
#include <u8g2lib.h>
//所有构造函数第一个参数都是Rotation,这个参数表示内容是否旋转,U8G2提供了以下选项:U8G2_R0不旋转,
//U8G2_R1顺时针旋转90度,U8G2_R2,顺时针旋转180度,U8G2_R3顺时针旋转270度,U8G2_R3顺时针旋转270
//度,U8G2_MIRROR镜像翻转。此函数剩下的参数依次是时钟线,数据线,CS,DC,RESET
U8G2_SSD1306_128X64_NONAME_F_4W_SW_SPI u8g2(U8G2_R0, 18, 13, 4, 2, 15);
void setup()
{
u8g2.begin();
//开启中文字符集支持
u8g2.enableUTF8Print();
//设置字体
u8g2.setFont(u8g2_font_wqy12_t_chinese2);
}
void loop()
{
//清除缓存区内容
u8g2.clearBuffer();
//绘制内容
u8g2.setCursor(0, 15);//设置光标位置
u8g2.print("你好");
//发送缓存区内容到OLED显示
u8g2.sendBuffer();
}5,代码示例(分页模式实现进度条效果)
#include <Arduino.h>
#include <u8g2lib.h>
U8G2_SSD1306_128X64_NONAME_2_4W_SW_SPI u8g2(U8G2_R0, 18, 13, 4, 2, 15);
//初始化进度条长度
int length = 0;
void setup()
{
u8g2.begin();
}
void loop()
{
//进入第一页。即清除页面的内容
u8g2.firstPage();
do{
//显示边框
u8g2.drawFrame(0, 10, 128, 20);
//显示进度
u8g2.drawBox(5, 15, length, 10);
}while(u8g2.nextPage());
if (length< 118){
length++;
}else
{
length = 0;
}
}十一,外部中断
1,简介及注意事项

ESP32的外部中断有上升沿,下降沿,低电平和高电平触发模式。ISR名字可以随便起,


2,代码示例(按键触发中断)
#define BUTTON 14
volatile bool flag = false;
void handle_interrupt() //中断函数
{
flag = true
}
void setup()
{
Serial.begin(9600);
pinMode(BUTTON, INPUT_PULLDOWN);
//配置中断引脚
attachInterrupt(digitalPinToInterrpt(BUTTON), handle_interrupt, FALLING);
}
void loop()
{
if(flag)
{
Serial.println("外部中断触发了");
flag = false;
}
}十二,定时中断
1,简介

2,硬件定时器
(1)库函数

timer定时器指针需要用timerBegin()方法将他创建出来。alarm_value单位为微秒。autoreload如果为自动重载就是周期性触发,如果不是自动重载就只触发一次


(2)硬件定时器使用步骤

(3)代码示例
#define LED 2 //周期性触发的LED
#define LED_ONCE 4 //只触发一次的LED
hw_timer_t* timer = NULL;//创建定时器指针。定期触发
hw_timer_t* timer_once = NULL;//创建定时器指针。触发一次
void timer_interrupt()
{
digitalWrite(LED, !digitalRead(LED));
}
void timer_once_interrupt()
{
digitalWrite(LED_ONCE, !digitalRead(LED_ONCE));
}
void setup()
{
pinMode(LED, OUTPUT);
pinMode(LED_ONCE, OUTPUT);
//初始化定时器
timer = timeBegin(0, 80, true); //1us
timer_once = timeBegin(1, 80, true);
//配置定时器
timerAttachInterrupt(timer, timer_interrupt, true);
timerAttachInterrupt(timer_once, timer_once_interrupt, true);
//设置定时模式
timerAlarmWrite(timer, 1000*1000, true);//定时1s
timerAlarmWrite(timer_once, 1000*1000, true);
//启动定时器
timerAlarmEnable(timer);
timerAlarmEnable(timer_once);
}
void loop()
{
}3,软件定时器
(1)库函数
once_ms的第一个参数n表示n毫秒后只执行一次callback函数,图片中的写错了
(2)代码示例
#include <Ticker.h>
#define LED 2
#define LED_ONCE 4
//定义定时器对象
Ticker timer;
Ticker timer_once;
void timer_interrupt(int pin)
{
digitalWrite(pin, !digitalRead(pin));
}
void timer_once_interrupt(int pin)
{
digitalWrite(pin, !digitalRead(pin));
}
void setup()
{
pinMode(LED, OUTPUT);
pinMode(LED_ONCE, OUTPUT);
//配置定时器
timer.attach(0.5, timer_interrupt, LED);//0.5秒触发一次
timer_once.attach(0.5, timer_once_interrupt, LED_ONCE);
}
void loop()
{
}十三,舵机控制
1,控制


2,ledc输出PWM信号控制
#define FREQ 50 //频率
#define CHANNEL 0
#define RESOLUTION 8 //分辨率为256
#define SERVO 13
//控制舵机旋转角度的函数
int calculatePWM(int degree)
{
int min_width = 0.5 / 20 * pow(2, RESOLUTION);
int min_width = 2.5 / 20 * pow(2, RESOLUTION);
return (max_width - min_width) * degree / 180 + min_width;
}
void setup()
{
//建立LEDC通道
ledcSetup(CHANNEL, FREQ, RESOLUTION);
//关联GPIO口与LEDC通道
ledcAttachPin(SERVO, CHANNEL);
}
void loop()
{
ledcWrite(CHANNEL, (calculatePWM(30))); //旋转30度
}3,使用第三方库方式控制舵机
下载第三方库ESP32Servo
#include <ESP32Servo.h>
#define SERVO_PIN 13
#define MAX_WIDTH 2500 //定义最大脉宽
#define MIN_WIDTH 500 //定义最小脉宽
//定义servo对象
Servo myservo;
void setup()
{
//只用一个舵机,只分配一个硬件定时器即可
ESP32PWM::allocateTimer(0);
//设置频率
myservo.setPeriodHertz(50);
//关联servo对象与GPIO引脚,设置脉宽范围
myservo.attach(SERVO_PIN, MIN_WIDTH, MAX_WIDTH);
}
void loop()
{
myservo.write(180); //旋转180度
}十四,WiFi模块
1,简介
ESP32通过Arduino连接WiFi和创建热点 。
WiFi模块包含两种模式,热点AP模式和客户端STA模式。热点AP模式是指电脑或手机端直接连接ESP32发出的热点,如果电脑连接模块AP热点,电脑就不能上网了。因此在使用电脑端和模块进行网络通信时,一般情况下都是使用STA模式,也就是电脑和设备同时连接到相同网段的路由器上
2,WiFi相关函数
WiFi.begin用来连接网络,需要提供网络的SSID(名字)和密码

3,连接WiFi代码示例
#include <WiFi.h>
#define LED 2 //板载LED引脚号
const char* ssid = "your-ssid";
const char* password = "your-password";
void setup()
{
Serial.begin(9600);
Serial.println();
Serial.println();//打印空行
Serial.print("Connecting to");
Serial.println(ssid);
WiFi.begin(ssid, password);
//判断是否连接
while(WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address:");
Serial.println(WiFi.localIP());
//如果ESP32没有连接电脑,看不到串口监视器,这时我们可以通过板载LED反馈wifi连接状态
pinMode(LED, OUTPUT);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
digitalWrite(LED, HIGH);
delay(1500);
digitalWrite(LED, LOW);
}
void loop()
{
}4,创建热点代码示例
#include <WiFi.h>
const char* ssid = "your-ssid";
const char* password = "your-password"
void setup()
{
Serial.begin(9600);
//创建热点
WiFi.softAP(ssid, password);
Serial.print("Wi-Fi接入的IP:");
Serial.println(WiFi.softAPIP());
}
void loop()
{
}十五,获取网络请求
1,简介
esp32支持2.4G网络,我们可以通过发送HTTP请求来获取一些网络数据。一般这些网络数据都是由一些公共的API接口提供的,我们需要通过这些接口来发送HTTP请求来获取数据
当我们在浏览器中输入网址或者使用应用程序时,我们实际上是向服务器发送请求,HTTP请求是客户端与服务器之间通信的方式,用于获取或发送Web资源(文本文件,图像等等),客户端通过HTTP协议发起请求,服务端返回相应的数据

要获取数据就要调用相应的API接口

2,相关函数
HTTPClient库是一个用于Arduino的HTTP客户端库,它提供了一组函数来发送HTTP请求并且处理服务器响应

3,代码示例
//先保证ESP32联网
#include <WiFi.h>
#include <HTTPClient.h>
const char* ssid = "your-ssid";
const char* password = "your-password"
String URL = "http://apis.juhe.cn/simpleWeather/query";
//以下为URL的两个参数,可以参考你要访问的URL给定的API定义
String city = "上海";
String key = "a418ca9d9e190c91";
void setup()
{
Serial.begin(9600);
//连接WiFi
WiFi.begin(ssid, password);
Serial.print("正在连接WiFi:");
//判断是否连接
while(WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address:");
Serial.println(WiFi.localIP());
//创建HTTPClient对象
HTTPClient http;
//指定访问URL(接口地址)
http.begin(url+"?city="+city"&key="+key);//网站的定义方式,URL+参数,多个参数之间用&连接
//接收HTTP响应状态码
int http_code = http.GET();
Serial.printf("HTTP状态码:%d\n",http_code);
//获取响应正文
String response = http.getString();
Serial.print("响应数据:");
Serial.println(response);
//关闭连接
http.end();
}
void loop()
{
}



















 8381
8381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









