






明敏 发自 凹非寺
来源:量子位(QbitAI)
如果让GAN生成的逼真人像变成3D版,会怎样?
仿佛有摄像机对着人像直拍,正面、侧面、仰视、俯视不同角度都能展现。
真的有种人要从画中走出来那味儿了。
而且,这些效果都是由静态单视角图片生成的!
甚至能让卡通人像立体起来。
这就是上海交通大学和华为的最新研究:CIPS-3D。
它是一种基于GAN的3D感知生成器,只用原始单视角图像,无需任何上采样,就能生成分辨率256×256的清晰图像。
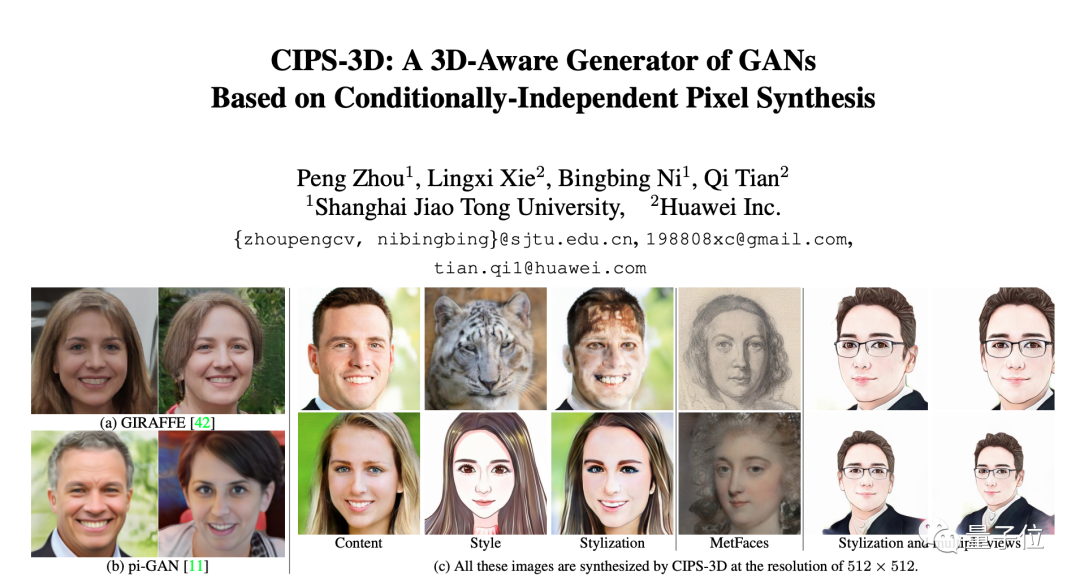
并且创下3D感知图像合成的新记录,FID仅为6.97。
现在,这个项目在GitHub上已有200+星,作者已将源代码开源,训练配置文件将在后续发布。
搞定镜像对称
在高清人脸数据集FFHQ上,CIPS-3D的表现可以说非常nice,连古典画都能变成立体版。
当然也能搞定不同动物的face。

看到图像从2D直接变成3D,可能有人已经想到了谷歌大名鼎鼎的NeRF。
它只需要输入少量静态图片,就能做到多视角的逼真3D效果。
而这次的CIPS-3D,也是基于NeRF开发。
它主要用到了两个网络:NeRF和INR(隐式神经表示法,Implicit Neural Representations)。
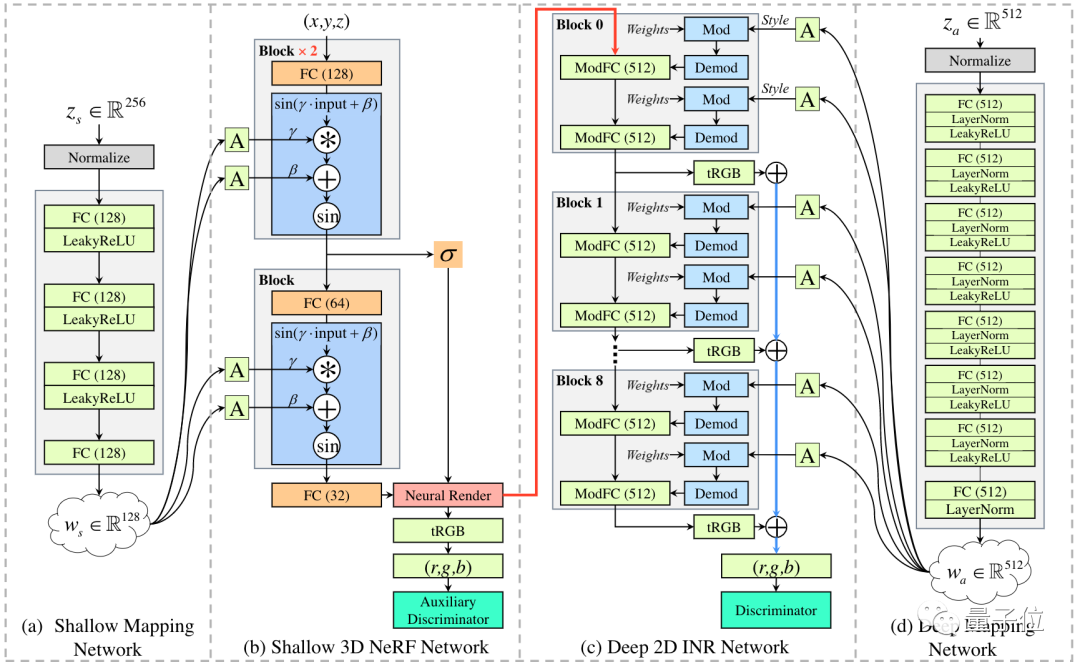
浅层是NeRF,它主要负责把人像从2D变为3D。
它将场景的体积表示优化为向量函数,输入为3D位置坐标和视图方向。
具体而言,就是沿相机射线采样信息,来合成图像。
然后,将这样的场景表示参数化为一个完全连接深度网络(MLP),输出对应的颜色和体积密度值。
为了获得更为准确的3D图像,往往需要对每条光线上多点采样,这也就造成NeRF所需的内存非常大。
因此,如果神经网络中只用NeRF,就会限制网络的深度,导致生成图像模糊、缺乏细节。

△第一列为NeRF生成,第二列为INR生成
所以在CIFS-3D中,研究人员将深层网络设置为INR,让它负责合成高保真的图像。
这种方法也能将各种信号参数化,输出RGB值。
而且由于不再与空间分辨率耦合,它可以对任意空间分辨率进行采样。
论文中也提到,该方法也没有任何上采样。
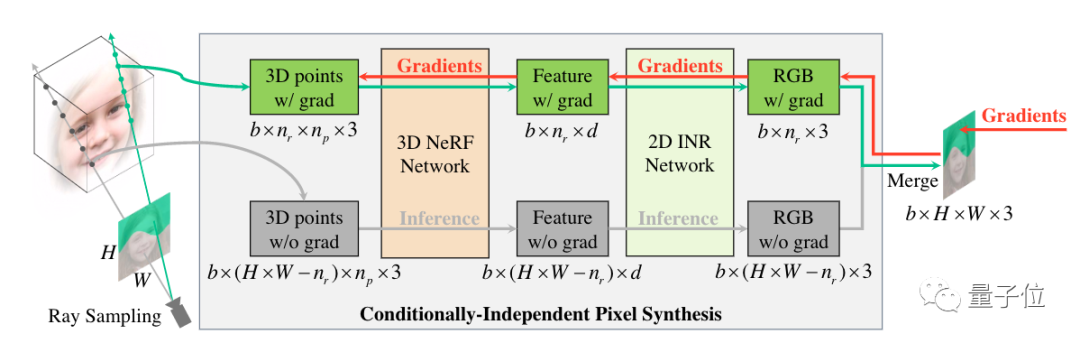
但是受限于CPU内存,如果直接训练高分辨率图像会有一定难度,为此研究人员提出了一种部分梯度反向传播的方法。
在训练时,该方法进对随机采样中的绿色光线进行梯度反向传播计算,其余光线则不计算。
解决了3D化问题,还能保证高保真,你以为这就结束了?
NO、NO、NO
在研究过程中,工作人员发现CIPS-3D还存在镜像对称问题。
这种现象其实在许多3D GAN中都存在,比如GIRAFFE、StyleNeRF。
比如在下面这个案例中,初始单角度图像的刘海是偏左的,但是生成的不同角度图像中,刘海会随着视角的变化而变化,就像是镜像一样。

出现这样的问题,是因为NeRF网络输入的坐标就有存在镜像对称。
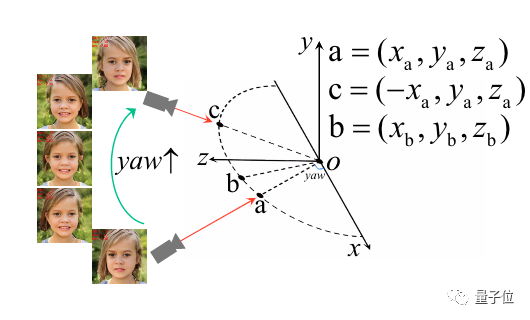
比如图中a、c两点的坐标就是完全镜像对称的关系。
这对于生成完全对称的物体而言没什么问题。
但是放在只给侧面角度的人像上来说,可能就是一场灾难。
为此,研究人员在神经网络中添加了一个鉴别器(discriminator),让它来辅助鉴别这种问题。
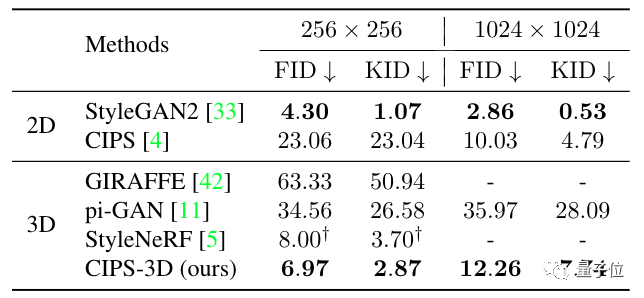
最后结果表明,与其他可生成3D人像的方法相比,FID、KID值明显降低,这两个值越低意味着生成图像质量越好。
团队介绍
值得一提的是,该论文通讯作者为田奇。

田奇,美国伊利诺伊大学香槟分校博士、IEEE Fellow, 也是原UTSA计算机系正教授。
发表文章约550余篇,包括250+ IEEE TPAMI、IJCV、CVPR/ICCV/ECCV、NeurIPS等国际顶级期刊和会议。
2018年加入华为云,研究主要方向为计算机视觉、自然语言处理和语音交互。
华为谢凌曦博士、上海交通大学倪冰冰教授也参与了此次研究。
谢凌曦,本科博士均毕业于清华大学计算机专业,专长计算机视觉、自动机器学习。目前为华为高级研究员。

倪冰冰,现为上海交通大学电子系特别研究员/长聘教轨副教授,博士生导师。
本科毕业于上海交通大学电子工程系,之后赴新加坡国立大学攻读博士。
博士期间,先后在微软亚洲研究院和谷歌公司美国总部工作,担任算法科学家。
2010-2015年于美国伊利诺伊大学香槟分校新加坡高等研究院担任研究科学家。
研究方向为计算机视觉、机器学习等。

本项研究已经由论文一作Peng Zhou(上海交通大学)上传至其GitHub主页,感兴趣的童鞋可以前去围观~
论文地址:
https://arxiv.org/abs/2110.09788
GitHub地址:
https://github.com/PeterouZh/CIPS-3D
本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程推荐:
1.面向自动驾驶领域的多传感器数据融合技术2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
















 3149
3149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









