






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨深蓝学院@知乎
来源丨https://zhuanlan.zhihu.com/p/445283508
编辑丨3D视觉工坊
1.The Stanford 3D Scanning Repository
是初学者用的比较多的数据集,模型居多;
http://graphics.stanford.edu/data/3Dscanrep/

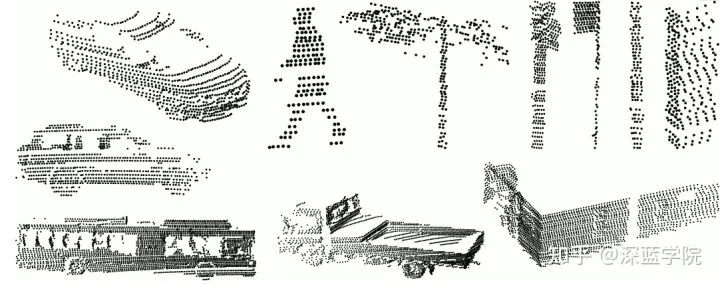
2.SYDNEY URBAN OBJECTS DATASET
数据集包含使用 Velodyne HDL-64E LIDAR 扫描的各种常见城市道路对象,收集于澳大利亚悉尼的 CBD,对不同类别的车辆、行人、标志和树木进行了 631 次单独的物体扫描。
收集它是为了测试匹配和分类算法。它旨在提供代表实际城市传感系统的非理想传感条件,在视点和遮挡方面具有很大的可变性。
http://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml
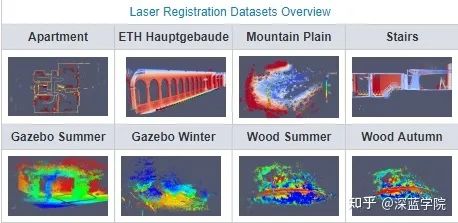
3.ASL Datasets Repository
该站点致力于为机器人社区提供数据集,旨在促进结果评估和比较,数据类型比较多,目标检测和点云配准的都有;
https://projects.asl.ethz.ch/datasets/doku.php?id=home
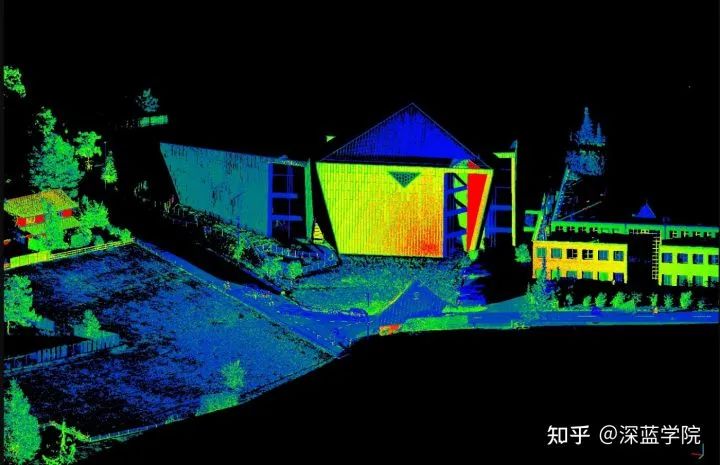
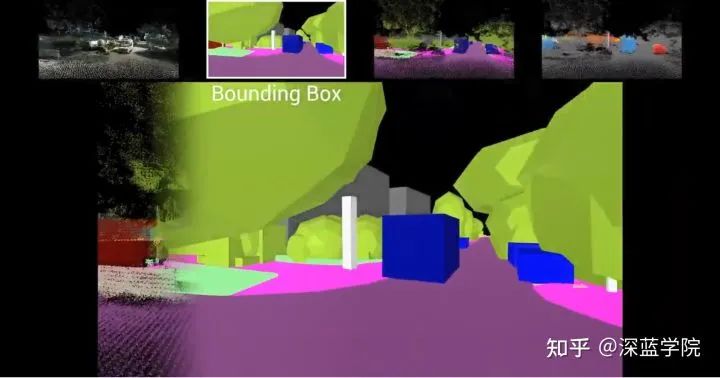
4.Large-Scale Point Cloud Classification Benchmark
本数据集提供了一个大型标记的自然场景 3D 点云数据集,总点数超过 40 亿。它还涵盖了一系列不同的城市场景:教堂、街道、铁轨、广场、村庄、足球场、城堡等等,提供了点云使用最先进的设备进行静态扫描,并包含非常精细的细节。
http://www.semantic3d.net/
5.RGB-D Object Dataset
RGB-D 对象数据集是一个包含 300 个常见家庭对象的大型数据集。这些对象被组织成 51 个类别,使用 WordNet 上位词-下位词关系(类似于 ImageNet)排列。该数据集是使用 Kinect 风格的 3D 相机记录的,该相机以 30 Hz 的频率记录同步和对齐的 640x480 RGB 和深度图像。每个物体都放置在转盘上,并在整个旋转过程中捕获视频序列。对于每个物体,有 3 个视频序列,每个视频序列都使用安装在不同高度的摄像机进行记录,以便从与地平线不同的角度观察物体。
http://rgbd-dataset.cs.washington.edu/index.html

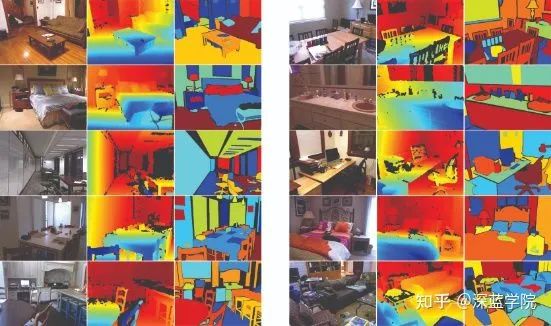
6.NYU Depth Datasets
这个数据集应该也是大家比较熟悉的,包括NYU-Depth V1数据集和NYU-Depth V2数据集,都是由来自各种室内场景的视频序列组成,这些视频序列由来自Microsoft Kinect的RGB和Depth摄像机记录。
NYU-Depth V1数据集包含有64种不同的室内场景、7种场景类型、108617无标记帧和2347密集标记帧以及1000多种标记类型。
https://cs.nyu.edu/~silberman/datasets/
7.IQmulus & TerraMobilita Contest
该数据库包含来自巴黎(法国)密集城市环境的 3D MLS 数据,由 3 亿个点组成。该数据库是在 iQmulus 和 TerraMobilita 项目的框架内生成的。它已被法国国家测绘局 (IGN) 开发的 MLS 系统 Stereopolis II 收购。
http://data.ign.fr/benchmarks/UrbanAnalysis/#

8.Oakland 3-D Point Cloud Dataset
据库的采集地点是在美国卡耐基梅隆大学周围,用激光扫描仪扫描得到,包含训练集,验证集和测试集数据;
http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/

9.The KITTI Vision Benchmark Suite
本数据集是通过在卡尔斯鲁厄中等规模城市、农村地区和高速公路上行驶而捕获的。每张图像最多可以看到 15 辆汽车和 30 名行人。除了以原始格式提供所有数据外,数据集还为每个任务提取基准。
http://www.cvlibs.net/datasets/kitti/
10.Robotic 3D Scan Repository
这个数据集比较适合做SLAM研究,包含了大量的Velodyne雷达数据;
http://kos.informatik.uni-osnabrueck.de/3Dscans/

本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程推荐:
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









