







 超级会员免费看
超级会员免费看
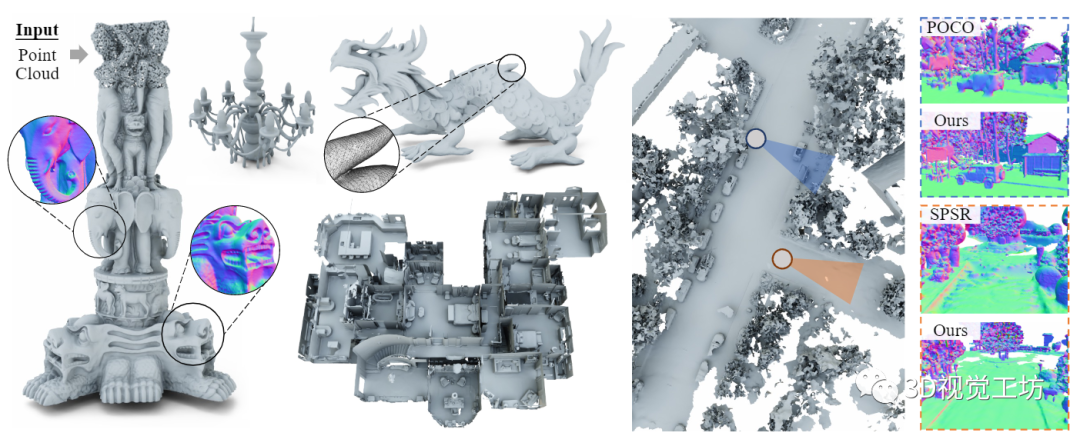
 NVIDIA在CVPR 2023提出了名为SOTA-NKSR的新方法,从大规模、稀疏和噪声点云中重建3D隐式表面。该方法基于神经核场(NKF)表示,解决了NKF的局限,如使用紧凑支持核处理大规模场景,对噪声的鲁棒性以及训练要求的减少。通过梯度拟合和稀疏线性求解器,SOTA-NKSR在物体级和室外驾驶场景的重建中展现优越性能,适用于具有不同密度和尺度的训练数据。
NVIDIA在CVPR 2023提出了名为SOTA-NKSR的新方法,从大规模、稀疏和噪声点云中重建3D隐式表面。该方法基于神经核场(NKF)表示,解决了NKF的局限,如使用紧凑支持核处理大规模场景,对噪声的鲁棒性以及训练要求的减少。通过梯度拟合和稀疏线性求解器,SOTA-NKSR在物体级和室外驾驶场景的重建中展现优越性能,适用于具有不同密度和尺度的训练数据。
作者:宁了个宁 | 来源:3D视觉工坊
在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf和代码链接。
添加微信:dddvisiona,备注:三维重建,拉你入群。文末附行业细分群。
1.摘要
我们提出了一种从大规模、稀疏和噪声点云重建3D隐式表面的新方法。我们的方法建立在最近引入的神经核场(NKF)表示之上。它具有与NKF相似的泛化能力,同时解决了其主要限制:(a)我们可以通过使用内存高效的稀疏线性求解器的紧凑支持核函数来处理大规模场景。(b)我们通过梯度
作者:宁了个宁 | 来源:3D视觉工坊
在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf和代码链接。
添加微信:dddvisiona,备注:三维重建,拉你入群。文末附行业细分群。
我们提出了一种从大规模、稀疏和噪声点云重建3D隐式表面的新方法。我们的方法建立在最近引入的神经核场(NKF)表示之上。它具有与NKF相似的泛化能力,同时解决了其主要限制:(a)我们可以通过使用内存高效的稀疏线性求解器的紧凑支持核函数来处理大规模场景。(b)我们通过梯度
 1302
1071
1302
1071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























