






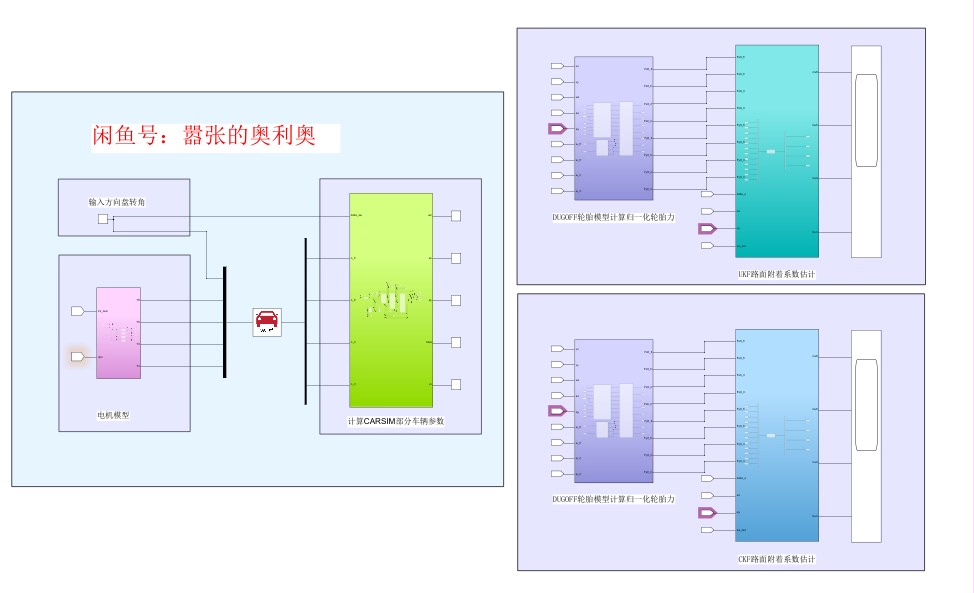
基于分布式驱动电动汽车的路面附着系数估计,分别采用无迹卡尔曼滤波和容积卡尔曼滤波对电动汽车四个车轮的路面附着系数进行估计。
本模型参考sci二区顶刊,开发了分布式驱动电动汽车路面附着系数估计的进阶版本,可在高速,低速下,对开路面,对接路面四种组合工况下对路面附着系数进行准确估计估计。
该模型利用无迹卡尔曼滤波,容积卡尔曼滤波对路面附着系数分别进行估计,容积卡尔曼和无迹卡尔曼均由S- function编写,可比较二种滤波的估计效果。
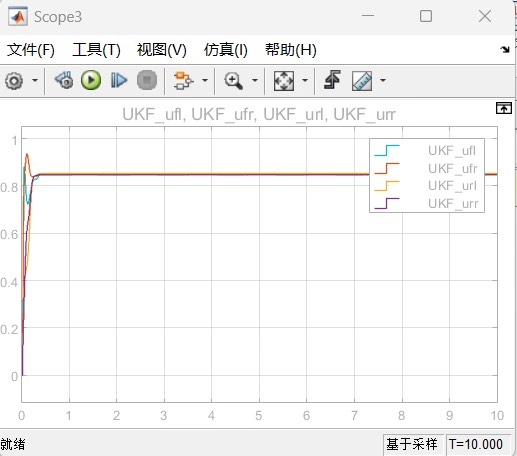
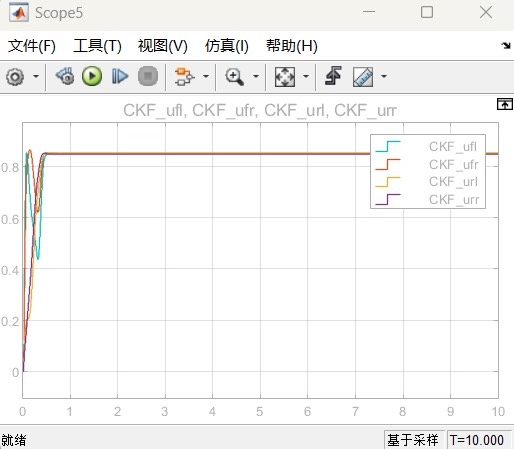
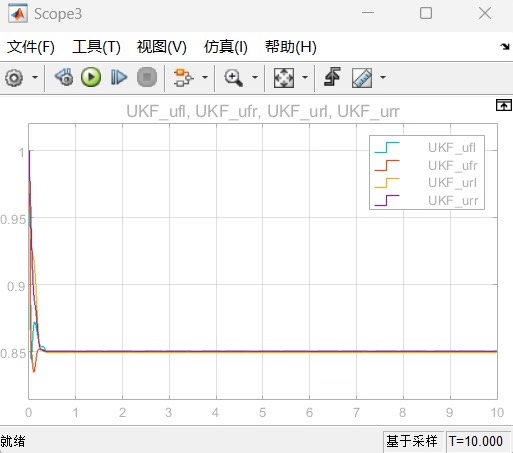
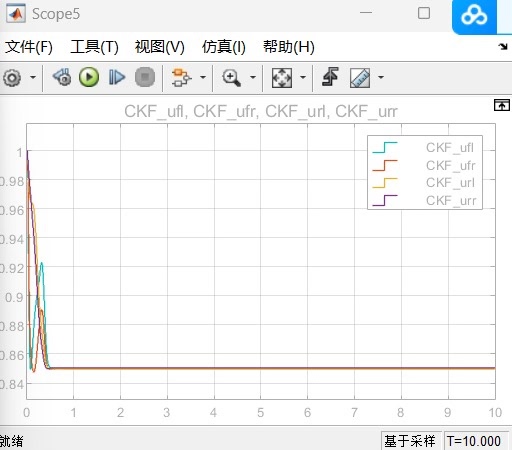
下图分别是路面附着系数初始状态为1和0时的估计效果,由此可见,两种算法具有较快的收敛速度和较高的估计精度,且不受初始状态的影响。
ID:46600728388806433
嚣张的奥利奥
基于分布式驱动电动汽车的路面附着系数估计
随着电动汽车的普及,对于电动汽车的安全性能和驾驶体验提出了更高的要求。而路面附着系数作为影响行车稳定性的重要参数,对于电动汽车的驾驶控制至关重要。因此,准确估计路面附着系数成为了电动汽车研究领域的一个热点问题。
在本文中,我们采用了两种滤波算法,无迹卡尔曼滤波和容积卡尔曼滤波,对电动汽车四个车轮的路面附着系数进行估计。这两种滤波算法在路面附着系数估计方面具有较好的效果,并且在高速和低速下,对开路面和对接路面四种组合工况下的路面附着系数估计都能达到较高的准确性。
首先,我们结合了S-function编写的容积卡尔曼滤波和无迹卡尔曼滤波算法,开发了分布式驱动电动汽车路面附着系数估计的进阶版本。这个模型参考了SCI二区顶刊的相关文献,针对电动汽车的特性进行了适当的改进。
在实际应用中,我们发现无迹卡尔曼滤波和容积卡尔曼滤波两种算法均具有较快的收敛速度和较高的估计精度。无迹卡尔曼滤波通过将高斯分布的采样点映射到非线性系统中,克服了传统卡尔曼滤波对非线性问题的局限性。容积卡尔曼滤波则是一种改进版本的无迹卡尔曼滤波,能够更好地估计系统的状态。
在图示中,我们展示了路面附着系数初始状态为1和0时的估计效果。可以明显地看到,无论初始状态为何,这两种滤波算法都能够快速收敛并且准确估计路面
【相关代码,程序地址】:http://fansik.cn/728388806433.html
















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









