






1. 由于模型预测控制依赖于精确的船舶运动模型,对模型参数的要求严格,所以考虑将具体的船舶参数带入Fossen模型,使用微分方程来求解船舶运动稳定性。
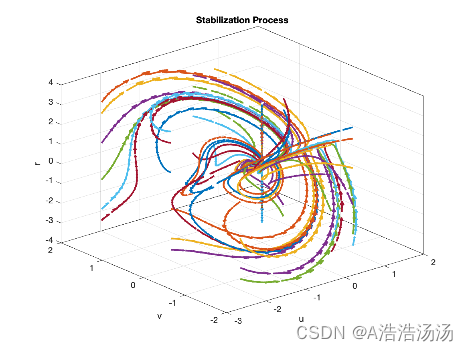
3. 由于一系列的控制量和外部扰动会影响船舶的运动状态,为了判断系统的稳定性,我们需要考虑在控制量和外力的作用下,船舶的运动状况是否会收敛到零。
4. 我们可以将船舶纵向、横向和偏航方向的速度范围设置为[-15,15](m/s)。均匀选择以原点为中心的球面上的一系列初始点,使用ODE45算法求解船舶运动状态在纵向、横向和偏航方向上的变化过程。
theta=(0:2:10)*pi/10;
phi=(0:4:20)*pi/10;
rou=3;
x0=rou.*sin(theta).*cos(phi);
y0=rou.*sin(theta).*sin(phi);
z0=rou.*cos(theta);
ltt=length(theta);
figure('color','w')
% subplot(141)
for i=1:ltt
for j=1:ltt
for k=1:ltt
[t,y] = ode45(@shipfcn,[-15,15],[x0(i);y0(j);z0(k)]);
% plot3(y(:,1),y(:,2),y(:,3),'linewidth',0.5);
quiver3(y(:,1),y(:,2),y(:,3),gradient(y(:,1)),gradient(y(:,2)),gradient(y(:,3)),'linewidth',2);%增加轨迹方向箭头
hold on
end
end
end
xlabel('u');ylabel('v');zlabel('r');
title('Stabilization Process');
box on;axis on;
view(-40,30);
function uvrdot = shipfcn (~,x)
% u=x(1);
% v=x(2);
% r=x(3);
% Wu=x(4);
% Wv=x(5);
% Wr=x(6);
% taou=x(7);
% taor=x(8);
m=23.8000;
Iz=1.7600;
err_model=0;
Xu=-0.7225*(1+err_model);
Yv=-0.8612*(1+err_model);
Nr=-1.90*(1+err_model);
Xdu=-2.0*(1+err_model);
Ydv=-10.0*(1+err_model);
Ndr=-1.0*(1+err_model);
Xuu=-1.3274*(1+err_model);
Yvv=-36.2823*(1+err_model);
Nrr=-0.75*(1+err_model);
m11=m-Xdu;
m22=m-Ydv;
m33=Iz-Ndr;
% d11=-(Xu+Xuu*abs(u));
% d22=-(Yv+Yvv*abs(v));
% d33=-(Nr+Nrr*abs(r));
% u_dot=(tau+Wu-d11*u+m22*v*r)/m11;
% v_dot=(Wv-d22*v-m11*u*r)/m22;
% r_dot=(delta+Wr-d33*r+(m11-m22)*u*v)/m33;
uvrdot=[((Xu+Xuu*abs(x(1)))*x(1)+m22*x(2)*x(3))/m11;((Yv+Yvv*abs(x(2)))*x(2)-m11*x(1)*x(3))/m22;((Nr+Nrr*abs(x(3)))*x(3)+(m11-m22)*x(1)*x(2))/m33];
% uvrdot=[(x(7)+X(4)+(Xu+Xuu*abs(x(1)))*x(1)+m22*x(2)*x(3))/m11;(X(5)+(Yv+Yvv*abs(x(2)))*x(2)-m11*x(1)*x(3))/m22;(x(6)+x(8)+(Nr+Nrr*abs(x(3)))*x(3)+(m11-m22)*x(1)*x(2))/m33];
% uvrdot=[(taou+Wu-d11*u+m22*v*r)/m11;(Wv-d22*v-m11*u*r)/m22;(taor+Wr-d33*r+(m11-m22)*u*v)/m33];
end
欢迎交流指正。















 832
832











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









