






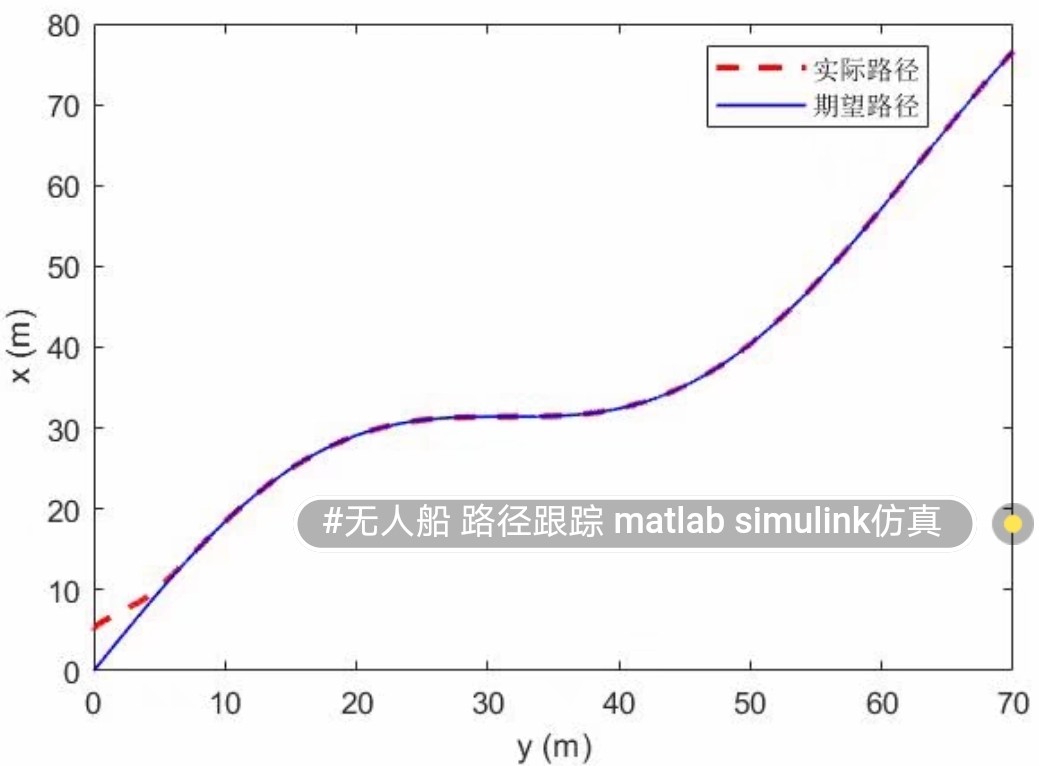
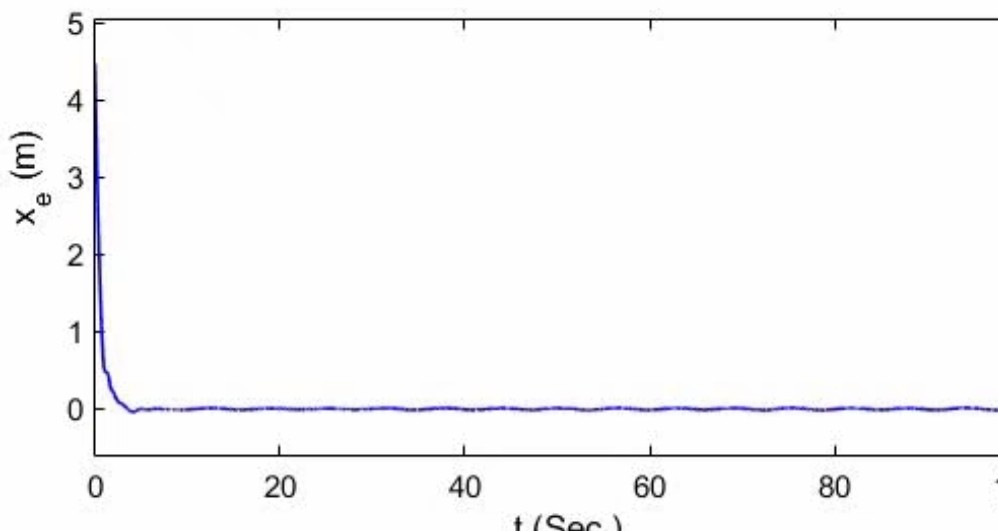
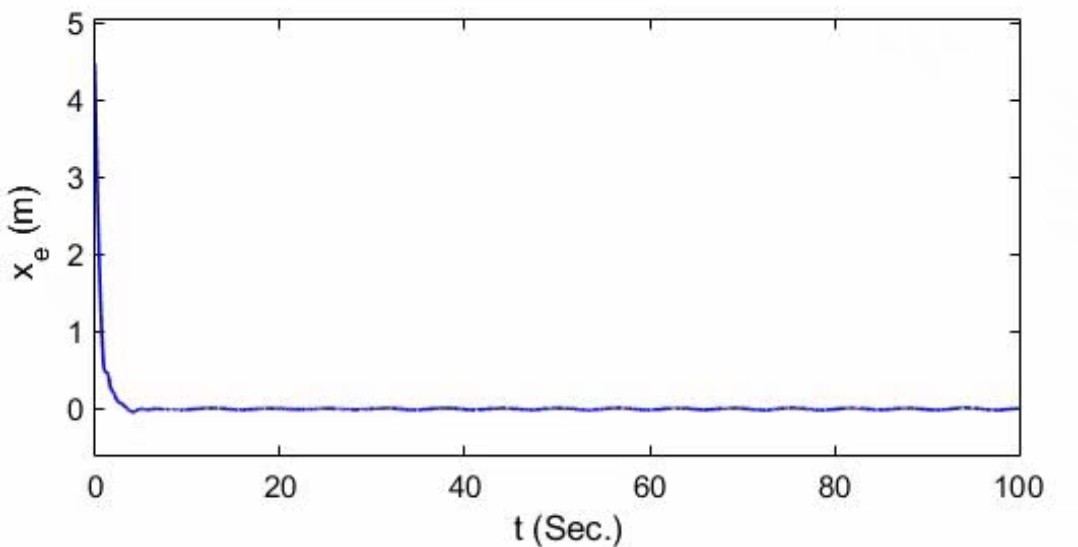
无人船/无人艇路径跟踪控制 Matlab/ Simulink效果
基于Foseen船舶模型,LOS制导子系统+反步控制器制作 LOS+backstepping;
注:采用ESO实现漂角/侧滑角估计
ID:96114744634403819
全身而退
无人船和无人艇的路径跟踪控制是无人船和无人艇技术领域中的一个重要问题。随着自动化技术的不断发展和应用,越来越多的无人船和无人艇被应用于海洋科研、水下勘察、环境监测等领域。路径跟踪控制是无人船和无人艇能够精确地按照预定路径行驶的关键技术之一。
在路径跟踪控制中,Matlab和Simulink是常用的工具。Matlab提供了强大的数学计算和模拟功能,Simulink则提供了图形化编程环境,可以方便地建立系统模型并进行仿真验证。基于Foseen船舶模型,我们可以利用Matlab和Simulink进行路径跟踪控制算法的开发和效果验证。
在路径跟踪控制中,常用的控制算法包括LOS制导子系统和反步控制器。LOS制导子系统可以通过计算机视觉或者传感器数据来实时跟踪目标路径,并生成相应的指令控制船艇的航向。在无人船和无人艇的控制过程中,反步控制器可以用于实现航向和速度的控制,使得船艇能够按照预定的路径稳定地行驶。
为了实现更精确的航向控制,我们可以采用ESO来实现漂角和侧滑角的估计。ESO可以通过对系统模型进行自适应估计,准确地估计系统的漂角和侧滑角,从而提高路径跟踪控制的稳定性和精度。
此外,路径跟踪控制算法还可以根据实际需求进行定制化。例如,我们可以根据具体应用场景,定制LOS、控制律、观测器等。ALOS、ILOS、滑膜、PID、RBF等控制算法都可以根据具体情况进行选择和定制,以满足不同系统的控制需求。
综上所述,无人船和无人艇的路径跟踪控制是一个涉及多种技术方法和工具的复杂问题。通过利用Matlab和Simulink的强大功能,我们可以基于Foseen船舶模型,采用LOS制导子系统和反步控制器实现路径跟踪控制,并利用ESO实现漂角和侧滑角的估计。此外,根据具体需求,我们还可以定制化路径跟踪控制算法,以适应不同系统的控制需求。
总之,路径跟踪控制技术的研究和应用将进一步推动无人船和无人艇技术的发展,并为海洋科研、水下勘察和环境监测等领域提供更加可靠、高效的解决方案。相信随着技术的不断发展,无人船和无人艇的路径跟踪控制将取得更加重要的进展和应用。
以上相关代码,程序地址:http://wekup.cn/744634403819.html















 1252
1252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









