







本文针对导弹飞行的动力学特性进行了建模和仿真研究,重点分析了导弹在三维空间中的运动行为与控制系统的相互作用。首先,构建了导弹的动力学模型,考虑了导弹的质量、转动惯量、升力、阻力以及重力等基本物理因素。通过建立状态空间模型,描述了导弹的线性和非线性运动特性。
在控制系统设计方面,采用了基于PID控制器的反馈控制方法来调节导弹的姿态和轨迹,以确保其飞行路径的精确性。通过调整控制器的增益参数,实现了对导弹纵向、横向和垂向运动的精确控制。针对不同飞行条件和外部扰动,本文设计了一种综合控制策略,使导弹能够在复杂环境下稳定飞行。
采用数值仿真方法验证了所提模型和控制策略的有效性。仿真结果表明,本文提出的导弹动力学模型能够准确模拟导弹的飞行过程,并且基于PID控制的控制器能够实现良好的姿态控制和轨迹跟踪性能。
本研究为导弹设计和飞行控制系统的优化提供了理论依据和技术支持,具有重要的工程应用价值。
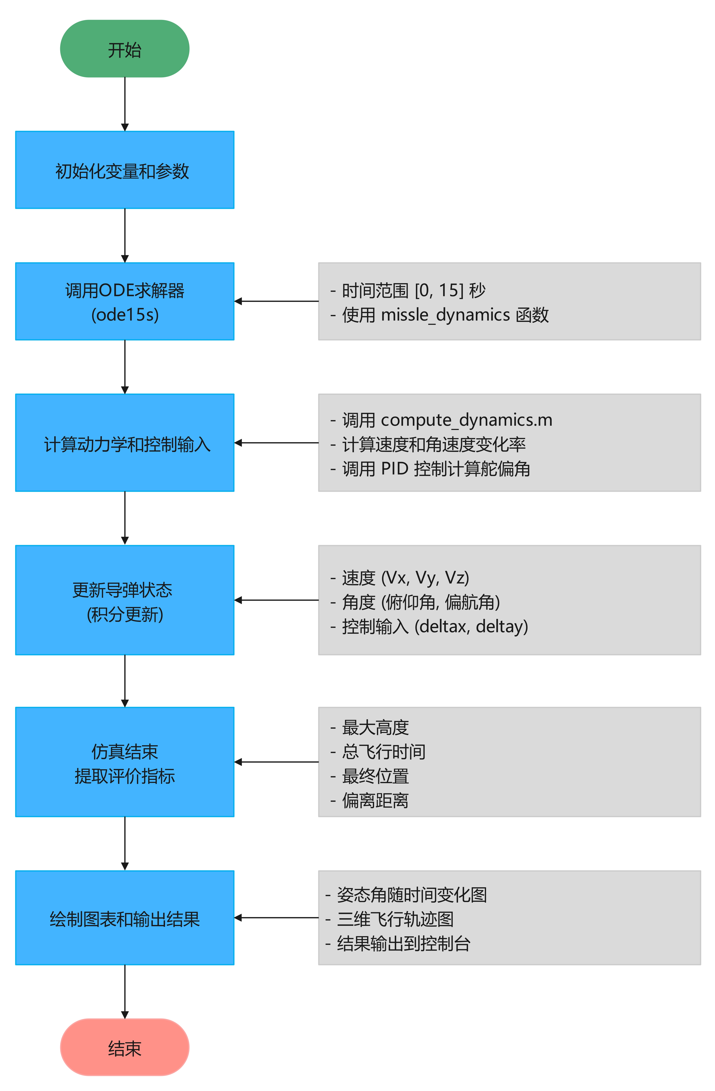
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
运行效果
运行 missile_simulation.m
图像 1:姿态角随时间变化
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 866
866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









