




 FAST(Features From Accelerated Segment Test)是一种快速的角点检测算法,适用于实时场景。它通过检查像素点与其邻域像素的灰度值差异来确定角点,通过非极大值抑制减少冗余特征点。算法对图像噪声敏感,且不具有旋转不变性,但计算效率高。
FAST(Features From Accelerated Segment Test)是一种快速的角点检测算法,适用于实时场景。它通过检查像素点与其邻域像素的灰度值差异来确定角点,通过非极大值抑制减少冗余特征点。算法对图像噪声敏感,且不具有旋转不变性,但计算效率高。
原文站点:https://senitco.github.io/2017/06/30/image-feature-fast/
前面已经介绍多种图像特征点(角点、斑点、极值点)的检测算法,包括Harris、LoG、HoG以及SIFT、SURF等,这些方法大多涉及图像局部邻域的梯度计算和统计,相比较而言,FAST(Features From Accelerated Segment Test)在进行角点检测时,计算速度更快,实时性更好。
FAST角点定义
FAST角点定义为:若某像素点与周围邻域足够多的像素点处于不同区域,则该像素可能为角点。考虑灰度图像,即若某像素点的灰度值比周围邻域足够多的像素点的灰度值大或小,则该点可能为角点。
算法步骤
- 对于图像中一个像素点 p ,其灰度值为
Ip - 以该像素点为中心考虑一个半径为3的离散化的Bresenham圆,圆边界上有16个像素(如下图所示)
- 设定一个合适的阈值 t ,如果圆上有n个连续像素点的灰度值小于
Ip−t 或者大于 Ip+t ,那么这个点即可判断为角点(n的值可取12或9)
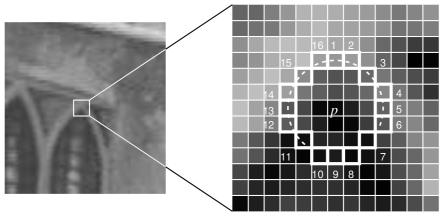
一种快速排除大部分非角点像素的方法就是检查周围1、5、9、13四个位置的像素,如果位置1和9与中心像素P点的灰度差小于给定阈值,则P点不可能是角点,直接排除;否则进一步判断位置5和13与中心像素的灰度差,如果四个像素中至少有3个像素与P点的灰度差超过阈值,则考察邻域圆上16个像素点与中心点的灰度差,如果有至少9个超过给定阈值则认为是角点。
角点分类器
- 选取需要检测的场景的多张图像进行FAST角点检测,选取合适的阈值n(n<12),提取多个特征点作为训练数据
- 对于特征点邻域圆上的16个像素 x∈{
1,2,...,16} ,按下式将其划分为3类
Sp→x=⎧⎩⎨⎪⎪d,Ip→
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2783
2783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









