






车道偏离预警——LDW
Carsim与simulink联合仿真模型,采用Carsim中自带场景+基于预瞄的驾驶员模型
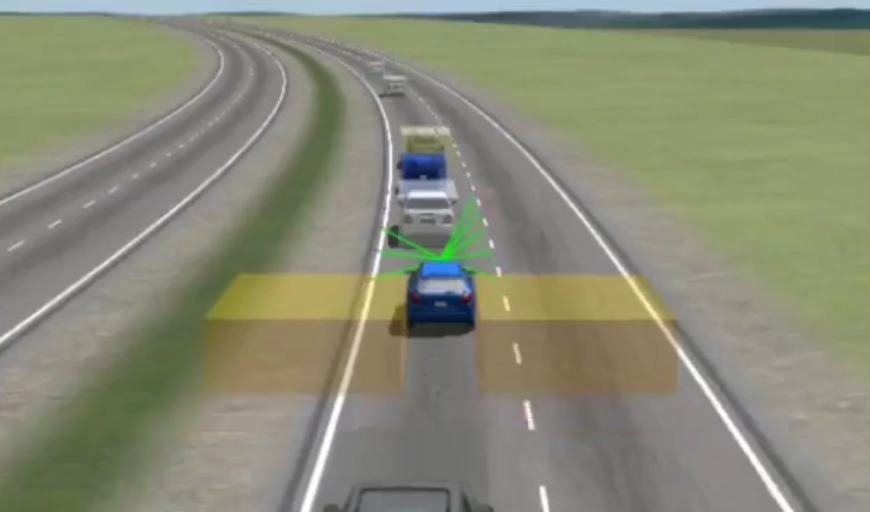
当基于摄像头对车道线进行检测并跟踪,当出现车辆偏离车道线时,自动发出预警信息,并在HUD界面显示
驾驶员模型算法部分支持定制,可以提供PID控制算法,模糊PID控制算法,单点预瞄跟随算法,Stanley算法,滑膜变结构控制算法,以及多点预瞄跟随算法
具体实现效果如视频所示,可以自定义道路和场景
ID:16100674153054988
多不多啦米

车道偏离预警是一种安全辅助技术,可以在驾驶员不注意时提醒其车辆偏离车道线,以降低事故风险。在车辆自动驾驶技术的发展过程中,车道偏离预警技术起到了重要的作用。本文将介绍一个基于Carsim与Simulink联合仿真模型的车道偏离预警系统。
首先,我们使用Carsim中自带的场景进行仿真实验。Carsim是一种常用的车辆动力学仿真软件,它可以模拟车辆在不同驾驶场景下的行为。在本系统中,我们使用Carsim来模拟车辆行驶过程,并通过Simulink来设计车道偏离预警系统。
车道偏离预警系统主要基于摄像头对车道线进行检测和跟踪。当系统检测到车辆偏离车道线时,会自动发出预警信息。此外,为了更好地提醒驾驶员,预警信息还会在HUD(Head-Up Display)界面上显示,使驾驶员能够更直观地感知车辆的状态。
在驾驶员模型算法部分,我们提供了多种定制化的算法选项。其中包括PID控制算法、模糊PID控制算法、单点预瞄跟随算法、Stanley算法、滑膜变结构控制算法以及多点预瞄跟随算法。这些算法可以根据驾驶员的需求进行选择和调整,以实现最佳的车辆控制效果。
通过视频演示,我们可以看到该车道偏离预警系统的具体实现效果。该系统可以自定义道路和场景,使仿真结果更加贴合实际驾驶场景。驾驶员可以通过HUD界面上的预警信息及时察觉车辆偏离车道线的情况,从而采取相应的驾驶操作,保证行车安全。
综上所述,基于Carsim与Simulink联合仿真模型的车道偏离预警系统具有较高的可定制性和仿真精度。通过对车辆行驶过程的模拟和对车道线的检测与跟踪,该系统能够及时预警,提醒驾驶员注意车辆的行驶状态,从而降低事故风险。在实际应用中,该系统可为驾驶员提供有效的安全辅助,提高驾驶的舒适性和安全性。
以上相关代码,程序地址:http://matup.cn/674153054988.html















 4402
4402











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









