






自动驾驶规划控制-nmpc路径规划和mpc路径跟踪
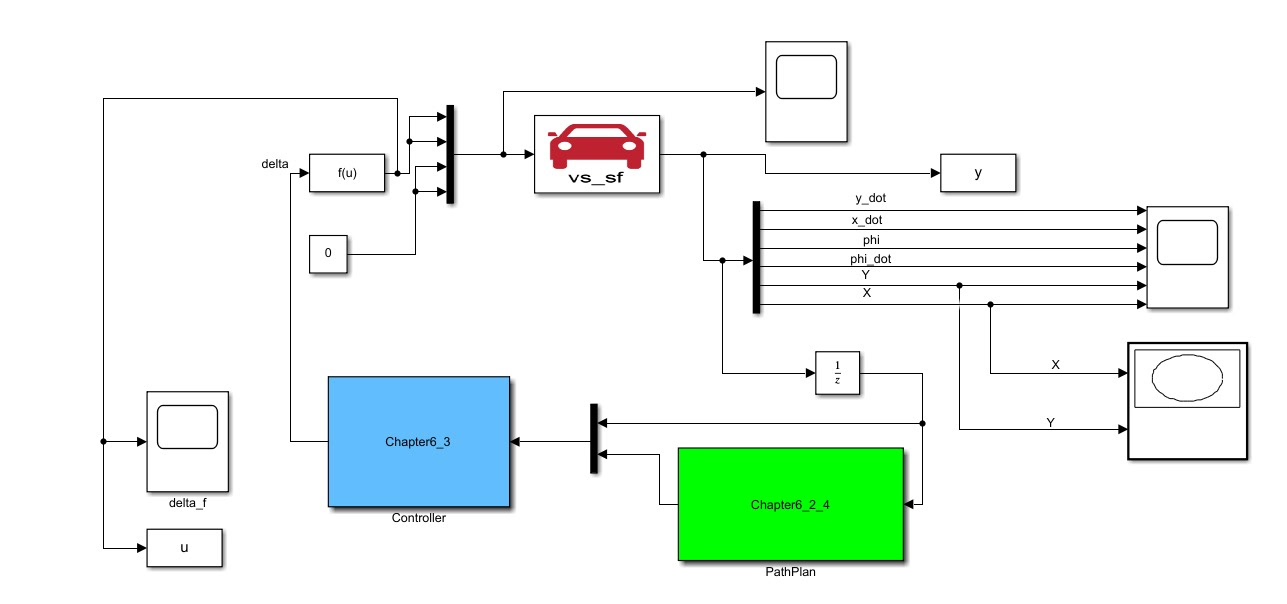
matlab和simulink联合仿真,非线性mpc路径规划,线性mpc路径跟踪
YID:4840706193250899
阿xin的自动驾驶小店


自动驾驶技术是近年来备受瞩目的领域之一,它的实现离不开高效的路径规划和跟踪算法。本文将重点讨论基于非线性模型预测控制(NMPC)路径规划和线性模型预测控制(MPC)路径跟踪的自动驾驶技术。
首先,我们简要介绍一下NMPC和MPC的概念。NMPC是一种跟踪非线性系统的控制策略,它通过迭代优化当前状态和控制输入,以实现系统的最佳控制效果。而MPC是一种基于线性系统模型的控制策略,通过预测模型输出和控制输入的关系,实现对系统状态的跟踪控制。
在自动驾驶中,路径规划是指给定起点和终点,通过确定一条合适的路径,使得车辆能够在规定的约束条件下安全到达目的地的过程。而路径跟踪则是指根据预先规划的路径,在实时控制下,使得车辆能够正确地跟随这条路径行驶。
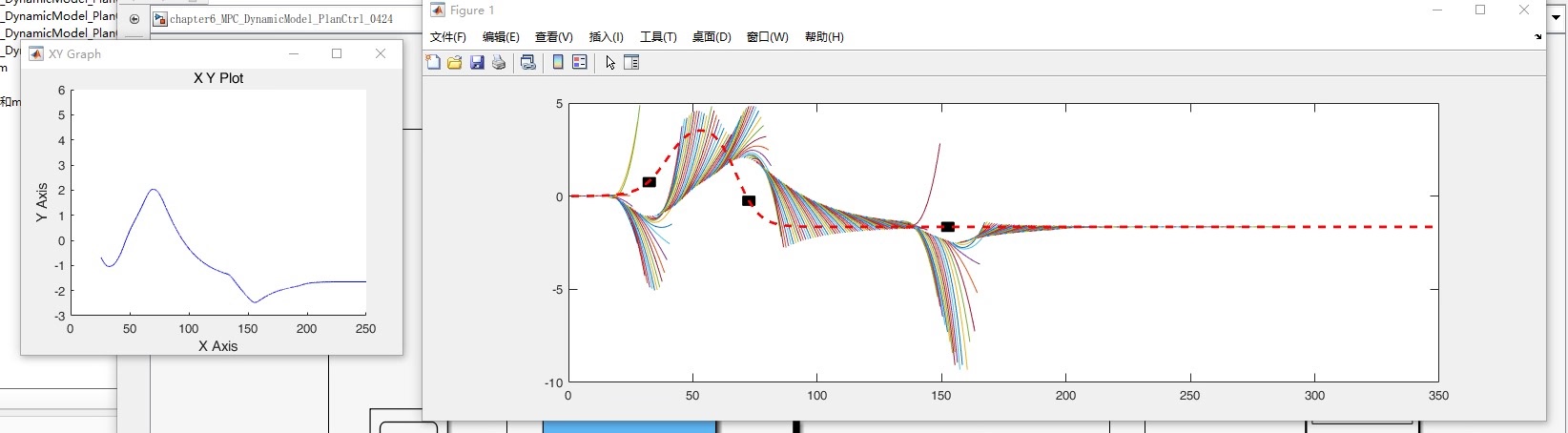
针对路径规划问题,我们可以采用NMPC算法。这种算法能够根据车辆的动力学模型和环境信息,动态地规划出一条最佳路径。在规划过程中,我们需要考虑到各种约束条件,包括车辆的最大速度、转弯能力以及交通规则等。同时,考虑到实时性的需求,我们可以利用matlab和simulink进行联合仿真,以加速规划过程并验证算法的有效性。
而在路径跟踪方面,我们可以采用MPC算法。该算法通过预测车辆状态的变化和控制指令的调整,实现车辆沿着预定路径行驶,并使车辆的偏离程度保持在一定范围内。在线性MPC路径跟踪中,我们可以将车辆的控制输入线性化,从而简化控制问题。通过将线性化模型与实际系统进行联合仿真,我们能够对跟踪效果进行评估和优化。
需要注意的是,NMPC和MPC算法在实际应用中可能会面临一些挑战。首先,由于非线性系统的复杂性,NMPC算法的计算复杂度较高,可能会导致实时性的问题。其次,MPC算法对模型精度要求较高,如果模型存在误差,可能会导致跟踪效果不理想。因此,需要对算法进行进一步的改进和优化,以提高其在自动驾驶系统中的实际应用性能。
综上所述,自动驾驶规划控制中的NMPC路径规划和MPC路径跟踪是实现自动驾驶技术的重要组成部分。通过matlab和simulink联合仿真,我们可以有效地设计和验证这些算法的性能。然而,NMPC和MPC算法在实际应用中还存在一些挑战,需要进一步研究和改进。希望本文对读者了解自动驾驶技术的路径规划和跟踪算法有所帮助,并为进一步的研究提供一定的启示。
【相关代码,程序地址】:http://fansik.cn/706193250899.html
















 6754
6754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









