







语义SLAM框架整理
基本框架
目标检测=类别+位置;
语义分割=物体轮廓;
实例分割=类别+位置+物体轮廓
语义分析的基本概念
在SLAM中,基于语义信息执行任务需要准确的目标识别。对象的语义信息以TOSM的形式存储,其中包含符号、显式和隐式信息。语义分析是将通过传感器接收到的信息与预先映射的感官数据数据库和知识库进行合并。结果,它被表示为语义描述符,我们通过匹配描述符提出并执行数据关联,然后最终识别对象。
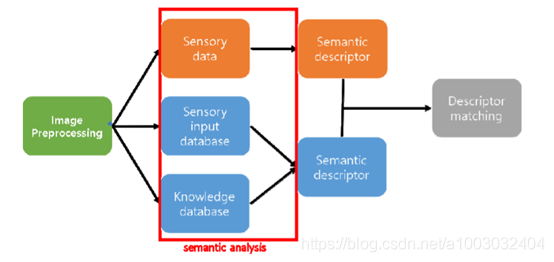
如上图,结合语义分析的数据关联方框图:橙色块是新获得的数据,蓝色块是预先映射的数据库。语义分析(红框)是将感官数据与数据库进行融合,生成语义描述符的过程。然后我们得到了两个语义描述符:一个来自环境,另一个来自map。数据关联是匹配两者的过程。
语义SLAM
语义SLAM是指SLAM系统在建图过程中不仅获得环境中的几何结构信息,同时可以识别环境中独立个体,获取其位置、姿态和功能属性等语义信息,以应对复杂场景及完成更加智能的服务任务。
语义 SLAM 的关键在于对环境中物体目标的精准识别,而近年兴起的深度学习技术恰好是当前最具潜力和优势的物体识别方法
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 211
211











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









