






一、CAN简介
CAN总线(Controller Area Network Bus)控制器局域网总线.
CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域。
1、CAN总线特征:
- 两根通信线(CAN_H、CAN_L),线路少,无需共地
- 差分信号通信,抗干扰能力强
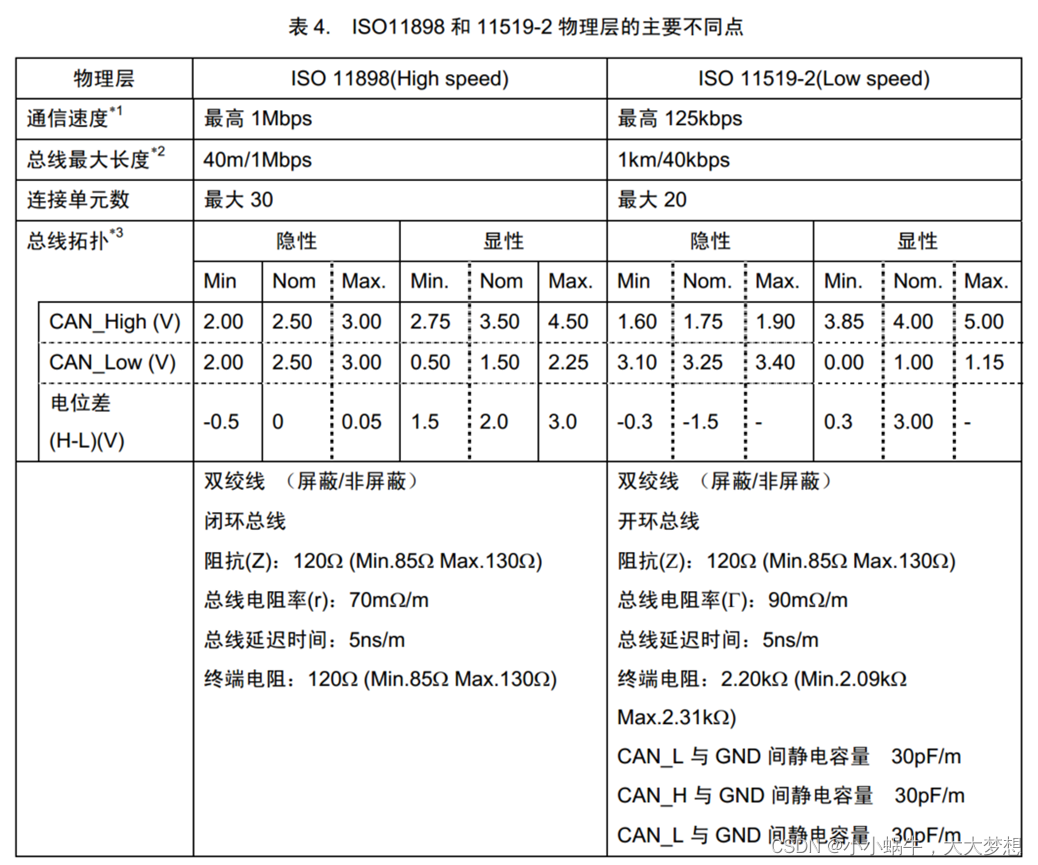
- 高速CAN(ISO11898):125k~1Mbps,<40m
- 低速CAN(ISO11519):10k~125kbps,<1km
- 异步,无需时钟线,通信速率由设备各自约定
- 半双工,可挂载多个设备,多设备同时发送数据时通过仲裁判断先后顺序
- 11位/29位报文ID,用于区分消息功能,同时决定优先级
- 可配置1-8字节的有效载荷
- 可实现广播式和请求式两种传输方式
- 应答、CRC校验、位填充、位同步、错误处理等特性
2、主流通信协议对比
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 | 应用场景 |
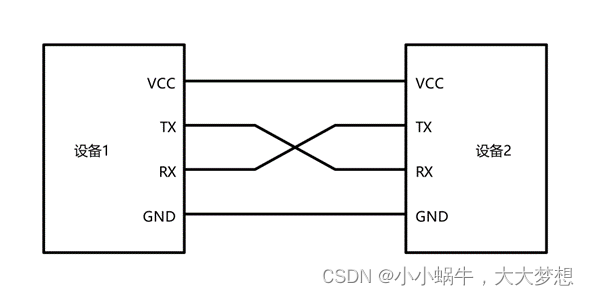
| UART | TX、RX | 全双工 | 异步 | 单端 | 点对点 | 两个设备互相通信 |
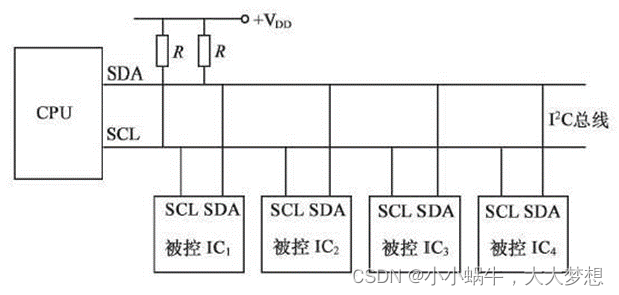
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 | 一个主控外挂多个模块 |
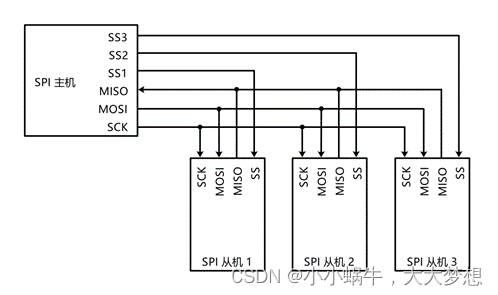
| SPI | SCK、MOSI、MISO、SS | 全双工 | 同步 | 单端 | 多设备 | 一个主控外挂多个模块(高速) |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 | 多个主控互相通信 |
USR
I2C
SPI
3、CAN硬件电路
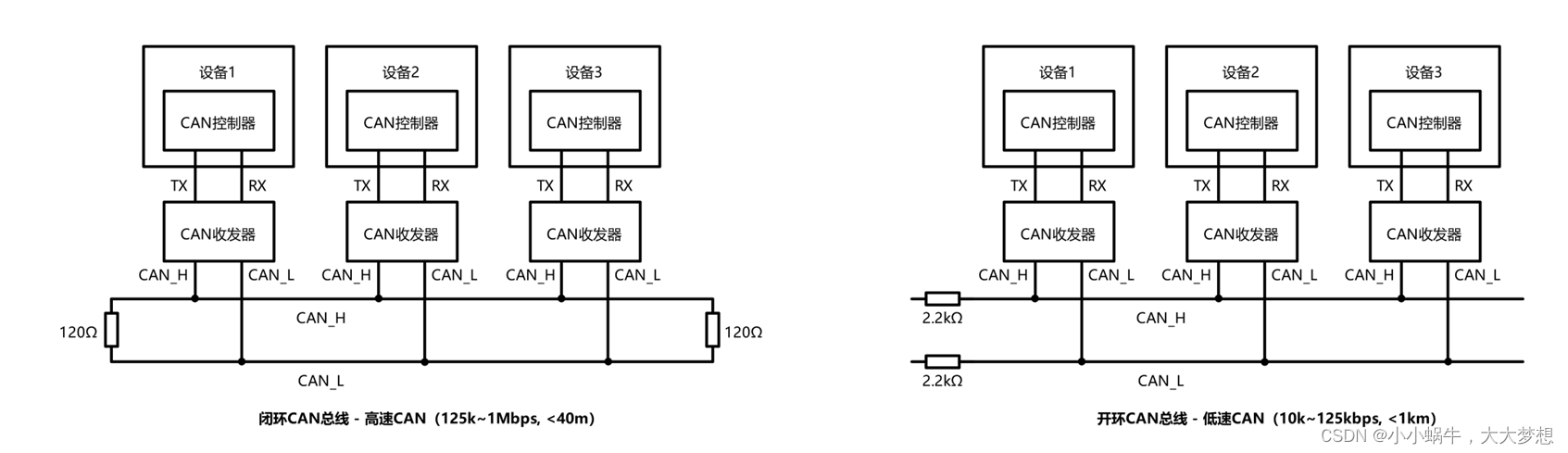
- 每个设备通过CAN收发器挂载在CAN总线网络上;
- CAN控制器引出的TX和RX与CAN收发器相连,CAN收发器引出的CAN_H和CAN_L分别与总线的CAN_H和CAN_L相连;
- 高速CAN使用闭环网络,CAN_H和CAN_L两端添加120欧的终端电阻
- 低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2k欧的终端电阻
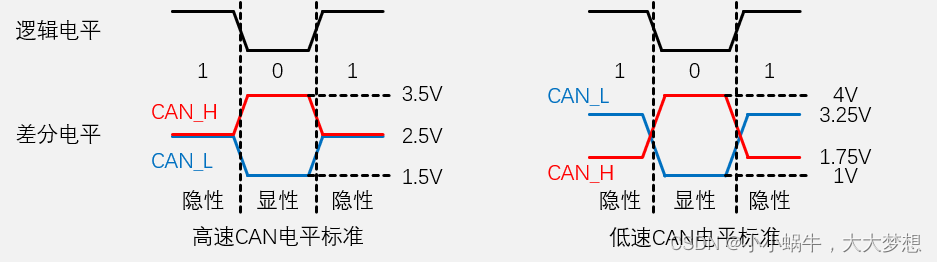
4、CAN电平标准
CAN总线采用差分信号,即两线电平差(Vcan_h-Vcan_l)传输数据位
高速CAN规定:
电平差为0V时表示逻辑1(隐性电平)
电平差为2V时表示逻辑0(显性电平)
低速CAN规定:
电平差为-1.5V时表示逻辑1(隐性电平)
电平差为3V时表示逻辑0(显性电平)
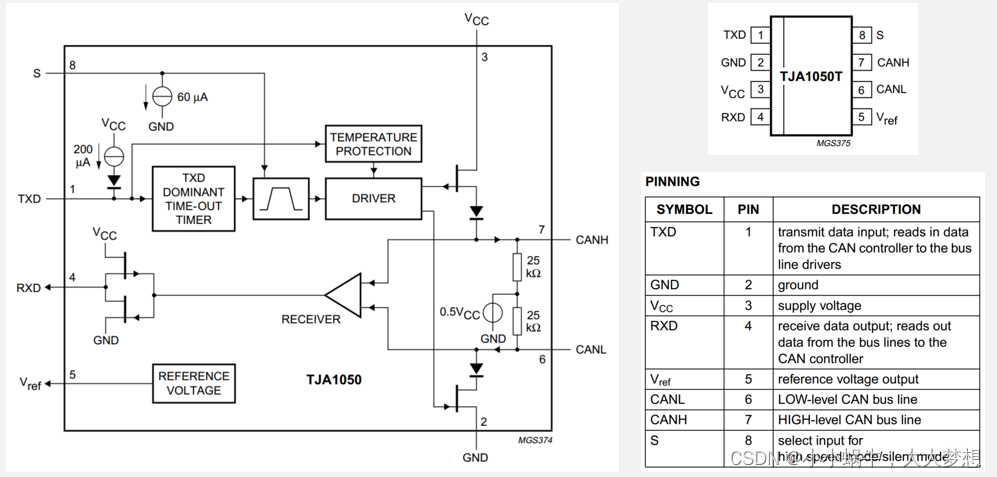
5、CAN收发器-TJA1050(高速CAN)
6、CAN物理层特性
7、CAN总线帧格式
CAN总线规定了以下5种类型的帧:
| 帧类型 | 用途 |
| 数据帧 | 发送设备主动发送数据(广播帧) |
| 遥控帧 | 接收设备主动请求数据(请求式) |
| 错误帧 | 某个设备检测出错误时向其他设备通知错误 |
| 过载帧 | 接收设备通知其尚未做好接收准备 |
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开 |
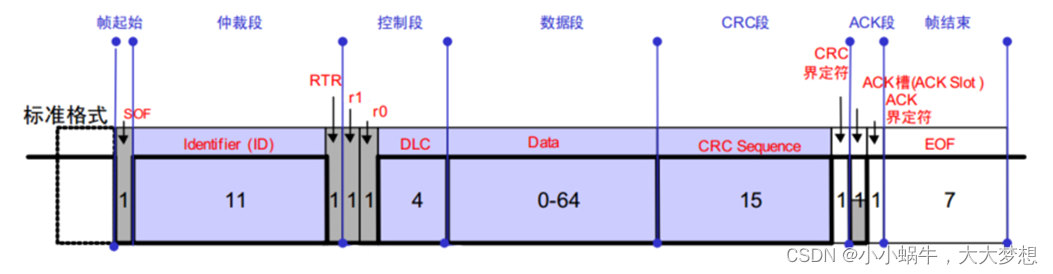
1、数据帧
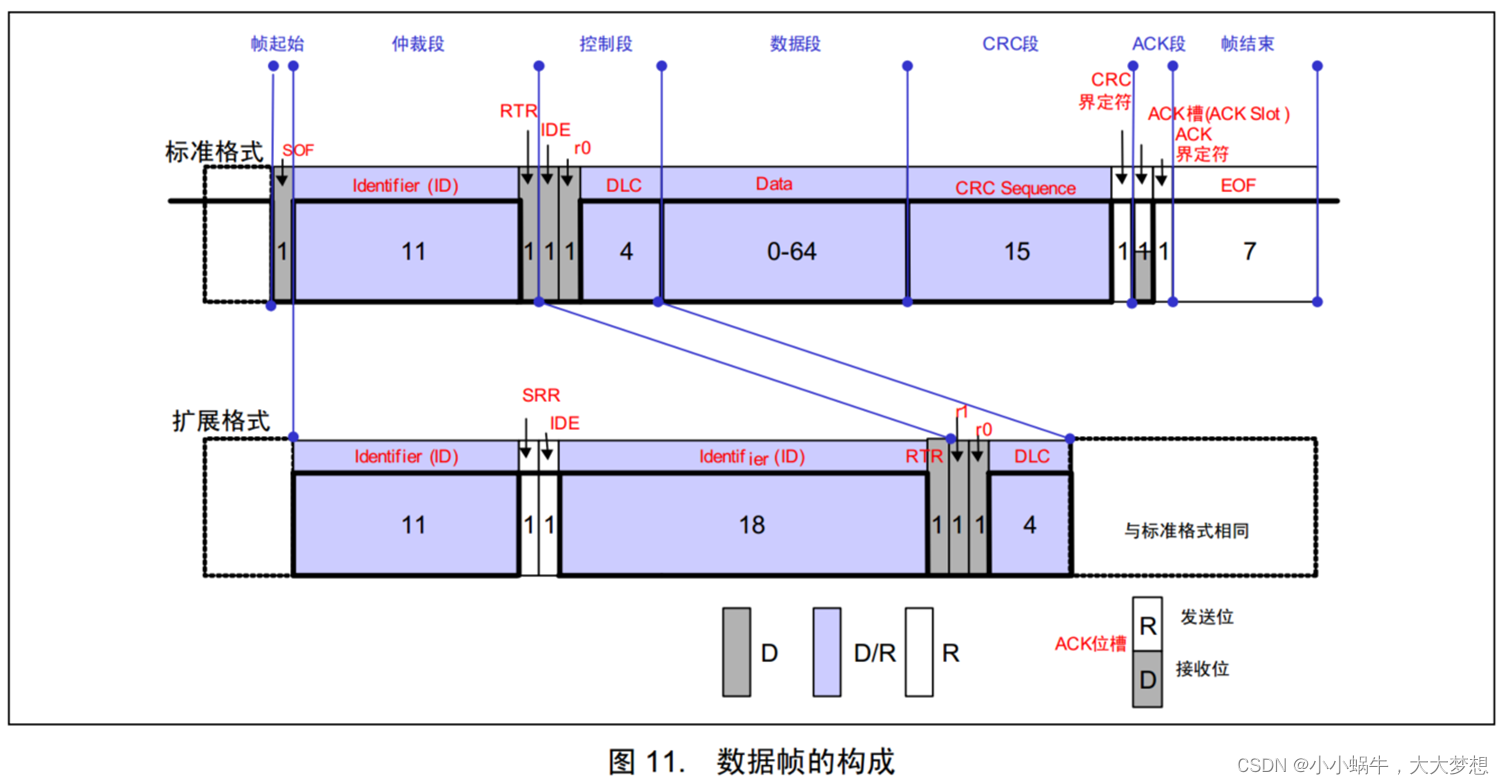
- 数据帧各部分用途简介:
- SOF(Start of Frame):帧起始,表示后面一段波形为传输的数据位
- ID(Identify):标识符,区分功能,同时决定优先级
- RTR(Remote Transmission Request ):远程请求位,区分数据帧和遥控帧
- IDE(Identifier Extension):扩展标志位,区分标准格式和扩展格式
- SRR(Substitute Remote Request):替代RTR,协议升级时留下的无意义位
- r0/r1(Reserve):保留位,为后续协议升级留下空间
- DLC(Data Length Code):数据长度,指示数据段有几个字节
- Data:数据段的1~8个字节有效数据
- CRC(Cyclic Redundancy Check):循环冗余校验,校验数据是否正确
- ACK(Acknowledgement):应答位,判断数据有没有被接收方接收
- CRC/ACK界定符:为应答位前后发送方和接收方释放总线留下时间
- EOF(End of Frame ):帧结束,表示数据位已经传输完毕
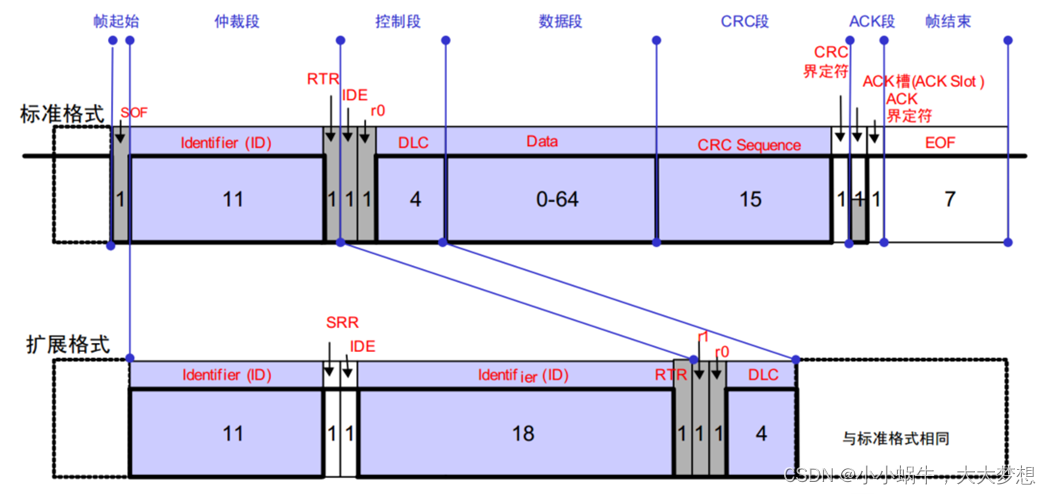
数据帧的发展历史
- CAN1.2时期,仅存在标准格式,IDE当时仍保留r1。
- CAN2.0时期,ID不够用,出现了扩展格式,增加了ID的位数,为了区分标准格式与扩展格式,协议将标准中的r1赋予了新的功能。
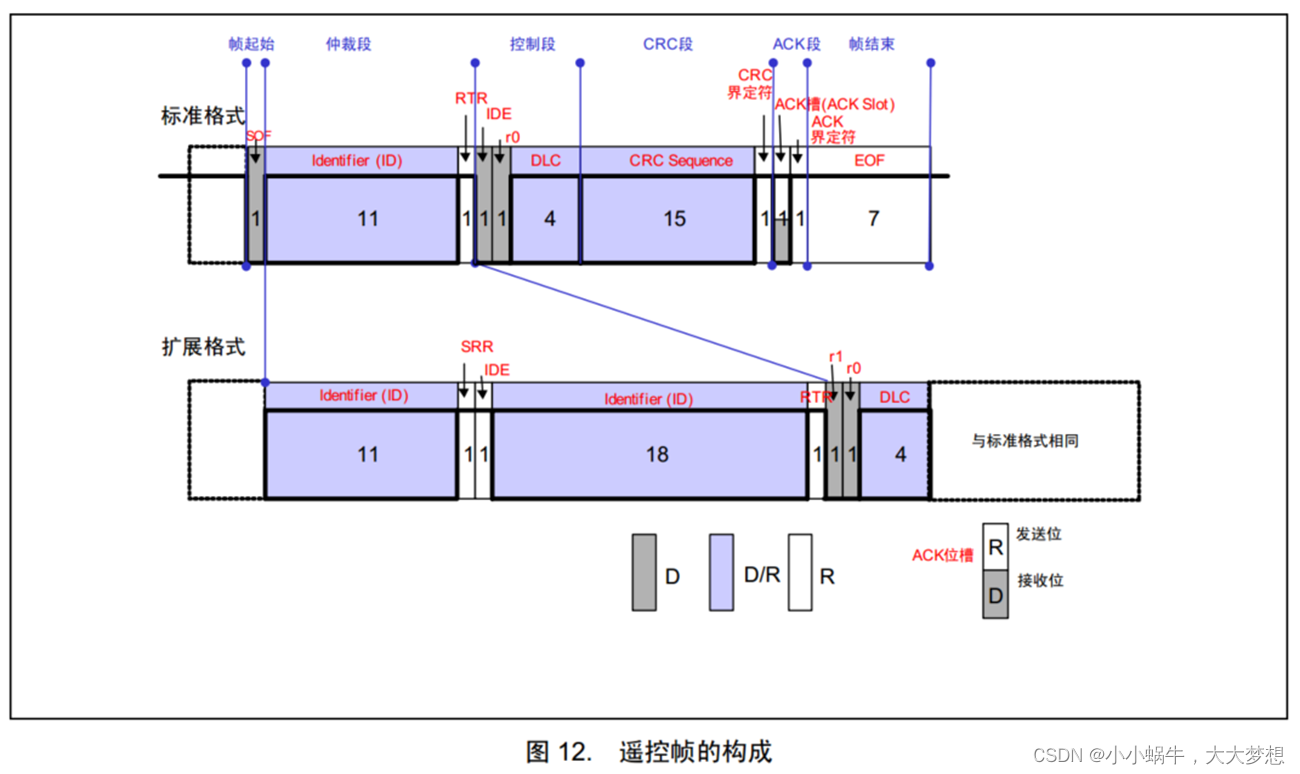
2、遥控帧
遥控帧无数据段,其他部分与数据帧相同
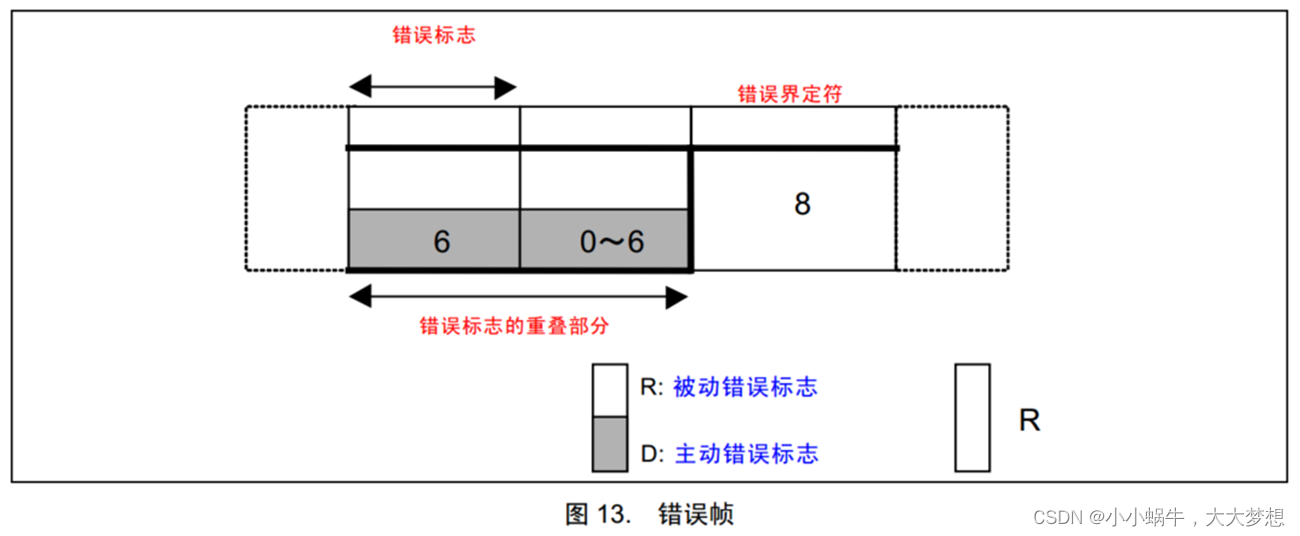
3、错误帧
总线上所有设备都会监督总线的数据,一旦发现“位错误”或“填充错误”或“
CRC
错误”或“格式错误”或“应答错误” ,这些设备便会发出错误帧来破坏数据,同时终止当前的发送设备
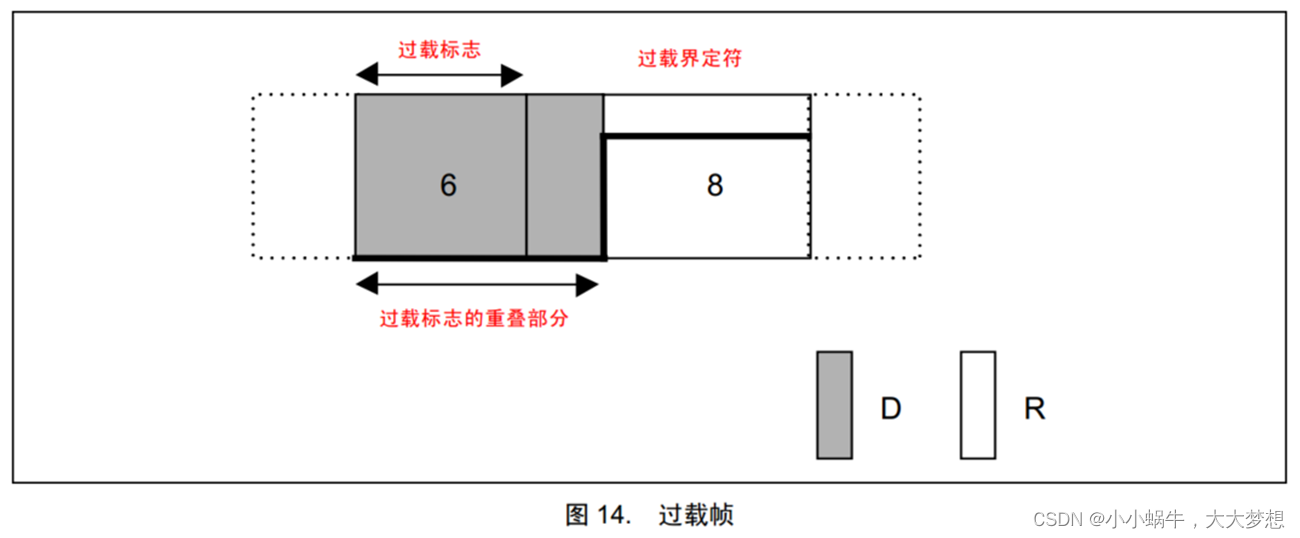
4、过载帧
当接收方收到大量数据而无法处理时,其可以发出过载帧,延缓发送方的数据发送,以平衡总线负载,避免数据丢失
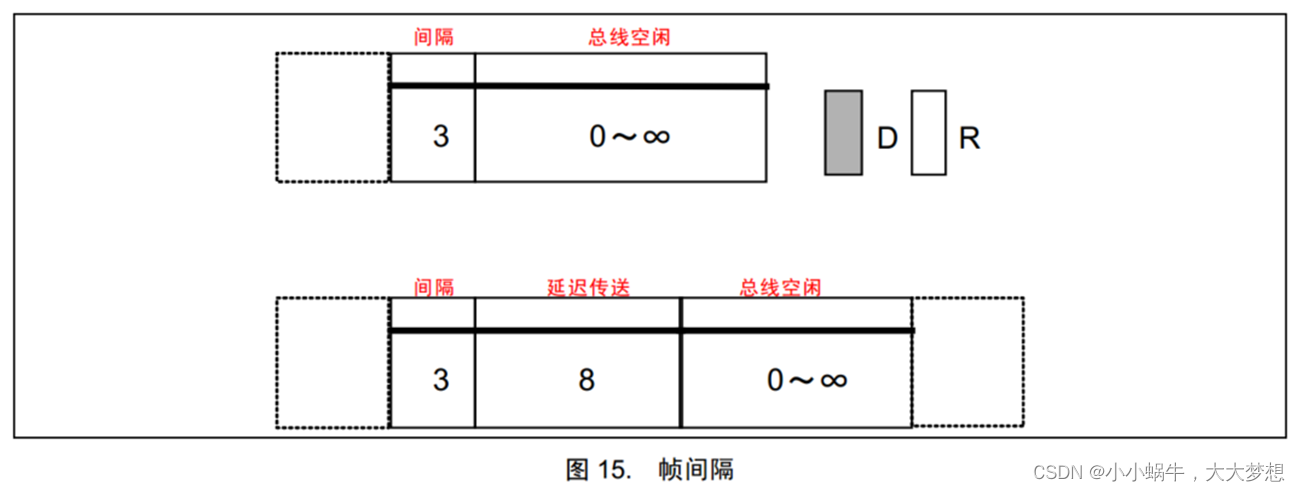
5、帧间隔
•
将数据帧和远程帧
与前面的帧分离开
•
3
位的帧间隔配合
7
位的
EOF
和
8
位的错误
/
过载界定符,可以实现更复杂的优先级控制策略(任何设备检测到连续
11
个隐性电平,即认为总线空闲)
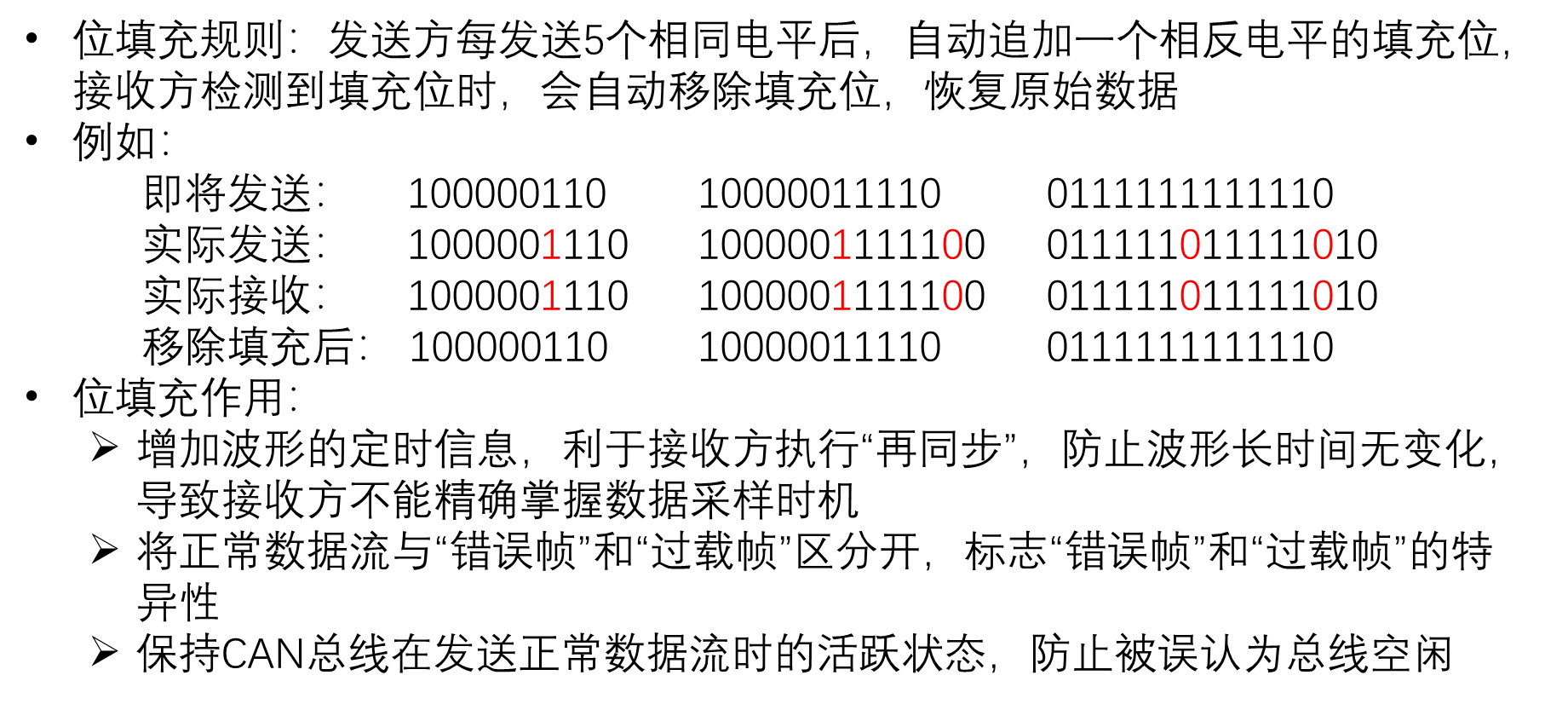
6、位填充
-
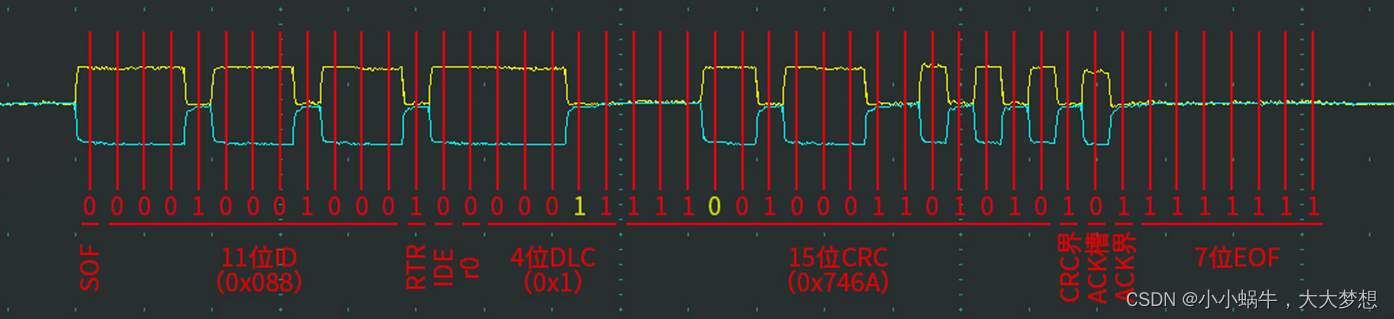
7、波形实例
- 标准数据帧,报文ID为0x555,数据长度1字节,数据内容为0xAA

- 标准数据帧,报文ID为0x666,数据长度2字节,数据内容为0x12, 0x34

- 扩展数据帧,报文ID为0x0789ABCD,数据长度1字节,数据内容为0x56

- 标准遥控帧,报文ID为0x088,数据长度1字节,无数据内容
8、接收方数据采样
- CAN总线没有时钟线,总线上的所有设备通过约定波特率的方式确定每一个数据位的时长
- 发送方以约定的位时长每隔固定时间输出一个数据位
- 接收方以约定的位时长每隔固定时间采样总线的电平,输入一个数据位
- 理想状态下,接收方能依次采样到发送方发出的每个数据位,且采样点位于数据位中心附近

接收方数据采样遇到的问题
•
接收方以约定的位时长进行采样,但是采样点没有对齐数据位中心

•
接收方刚开始采样正确,但是时钟有误差,随着误差积累,采样点逐渐偏离

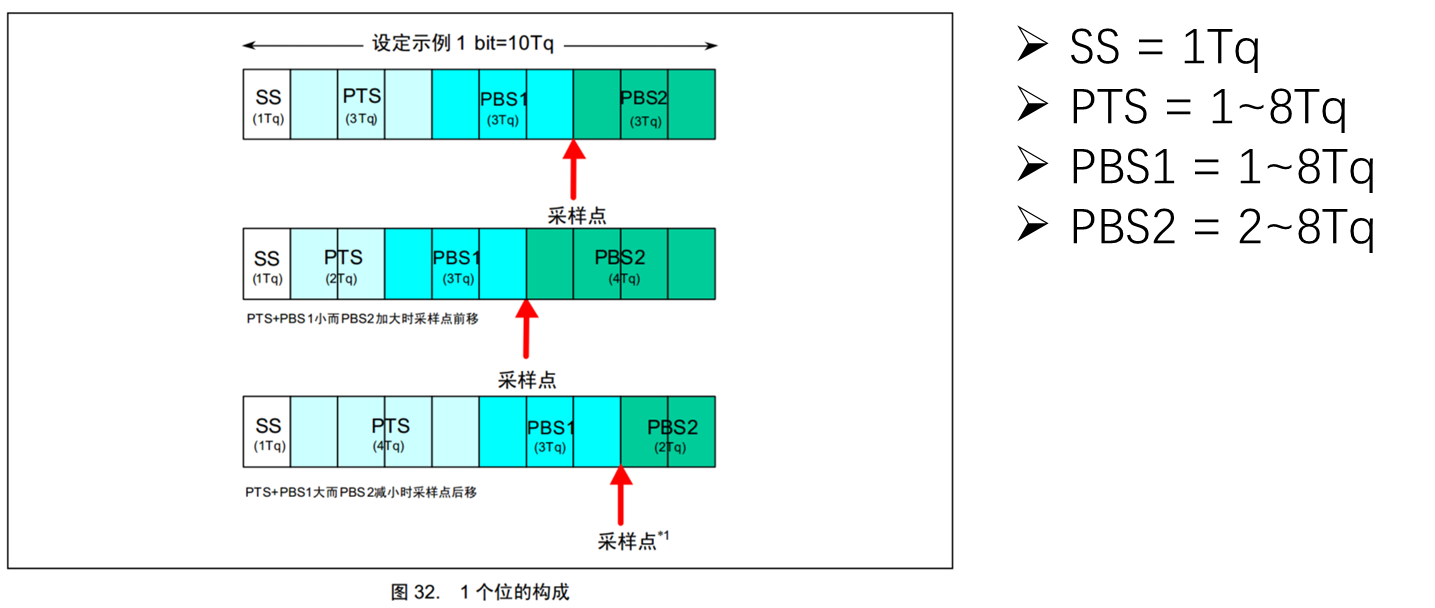
9、位时序
为了灵活调整每个采样点的位置,使采样点对齐数据位中心附近,
CAN
总线对每一个数据位的时长进行了更细的划分,分为同步段(
SS
)、传播时间段(
PTS
)、相位缓冲段
1
(
PBS1
)和相位缓冲段
2
(
PBS2
),每个段又由若干个最小时间单位(
Tq
)构成
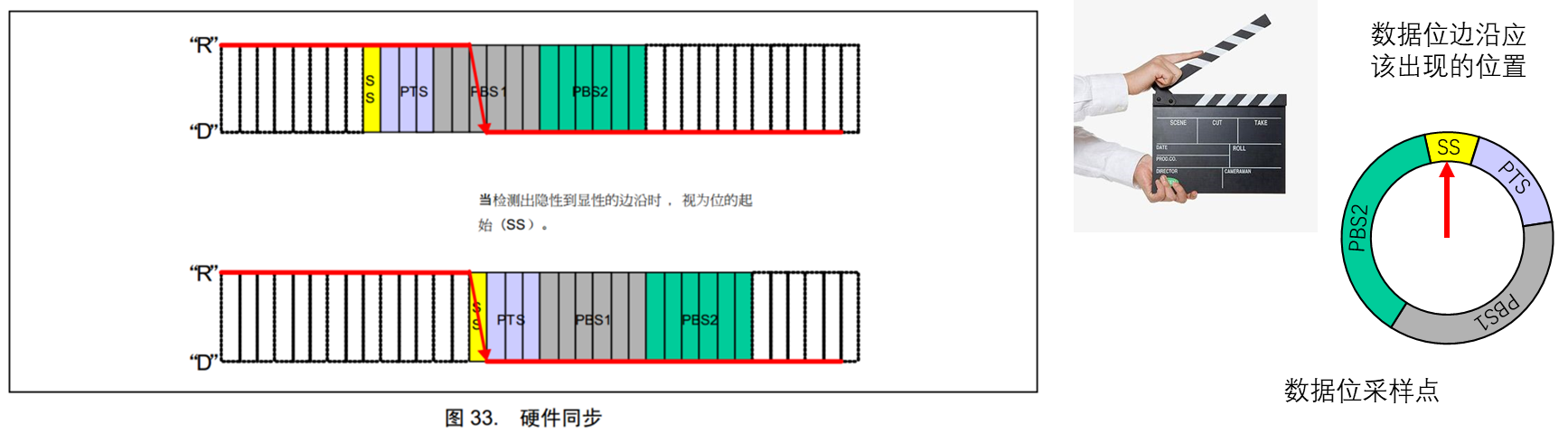
10、硬同步
•
每个设备都有一个位时序计时周期,当某个设备(发送方)率先发送报文,其他所有设备(接收方)收到
SOF
的下降沿时,接收方会将自己的位时序计时周期拨到
SS
段的位置,与发送方位的时序计时周期保持同步
•
硬同步只在帧的第一个下降沿(
SOF
下降沿)有效
•
经过硬同步后,若发送方和接收方的时钟没有误差,则后续所有数据位的采样点必然都会对齐数据位中心附近
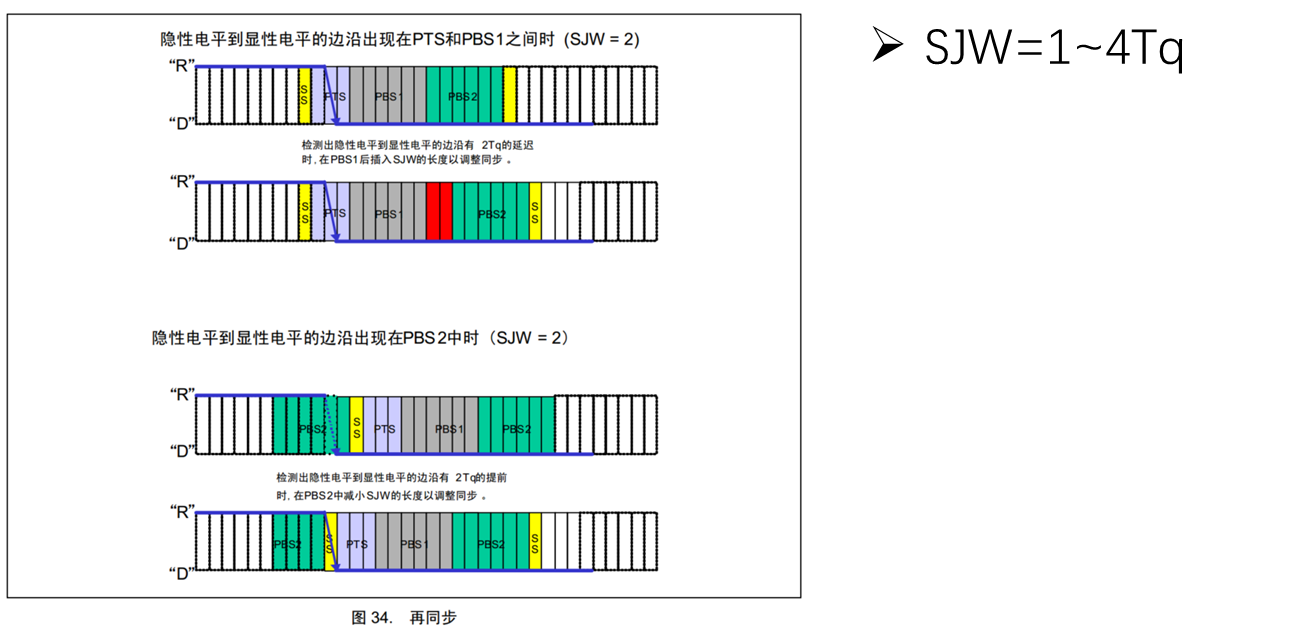
11、再同步
- 若发送方或接收方的时钟有误差,随着误差积累,数据位边沿逐渐偏离SS段,则此时接收方根据再同步补偿宽度值(SJW) 通过加长 PBS1 段,或缩短PBS2 段,以调整同步
- 再同步可以发生在第一个下降沿之后的每个数据位跳变边沿
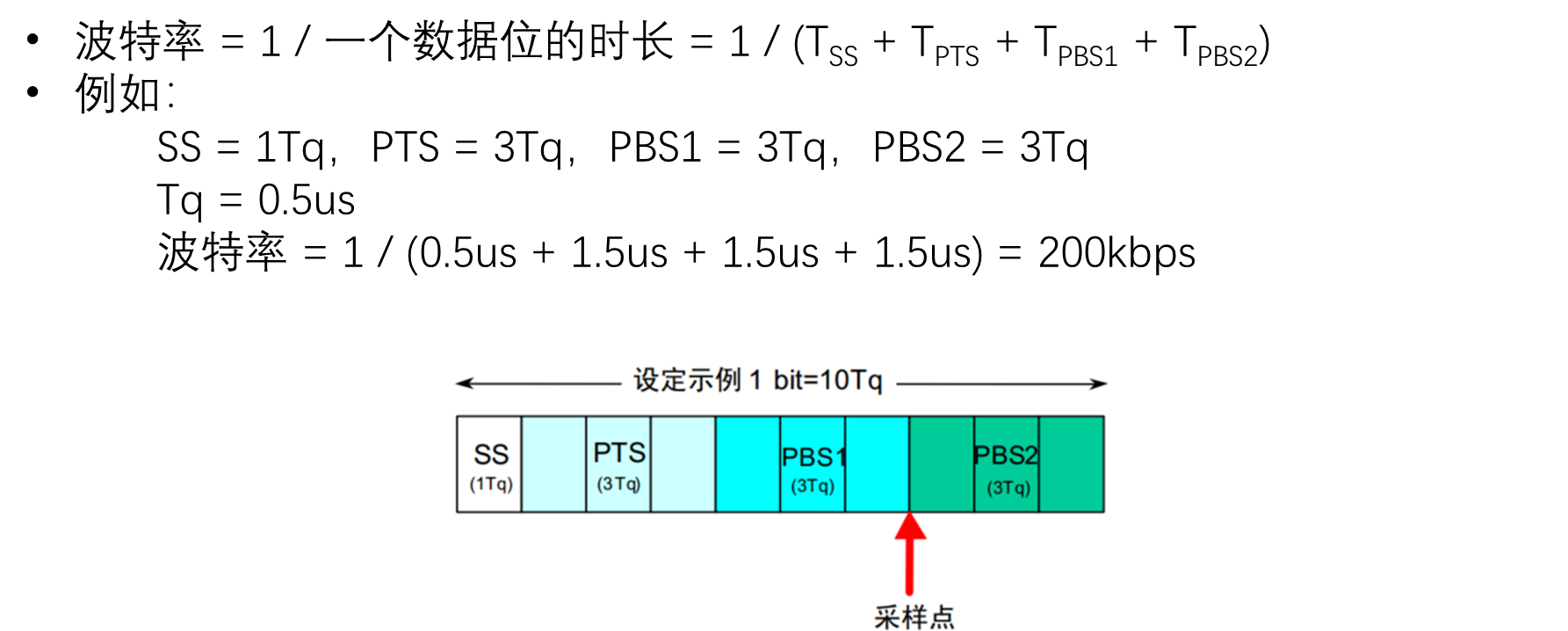
11、波特率计算
12、多个设备同时发送遇到的问题
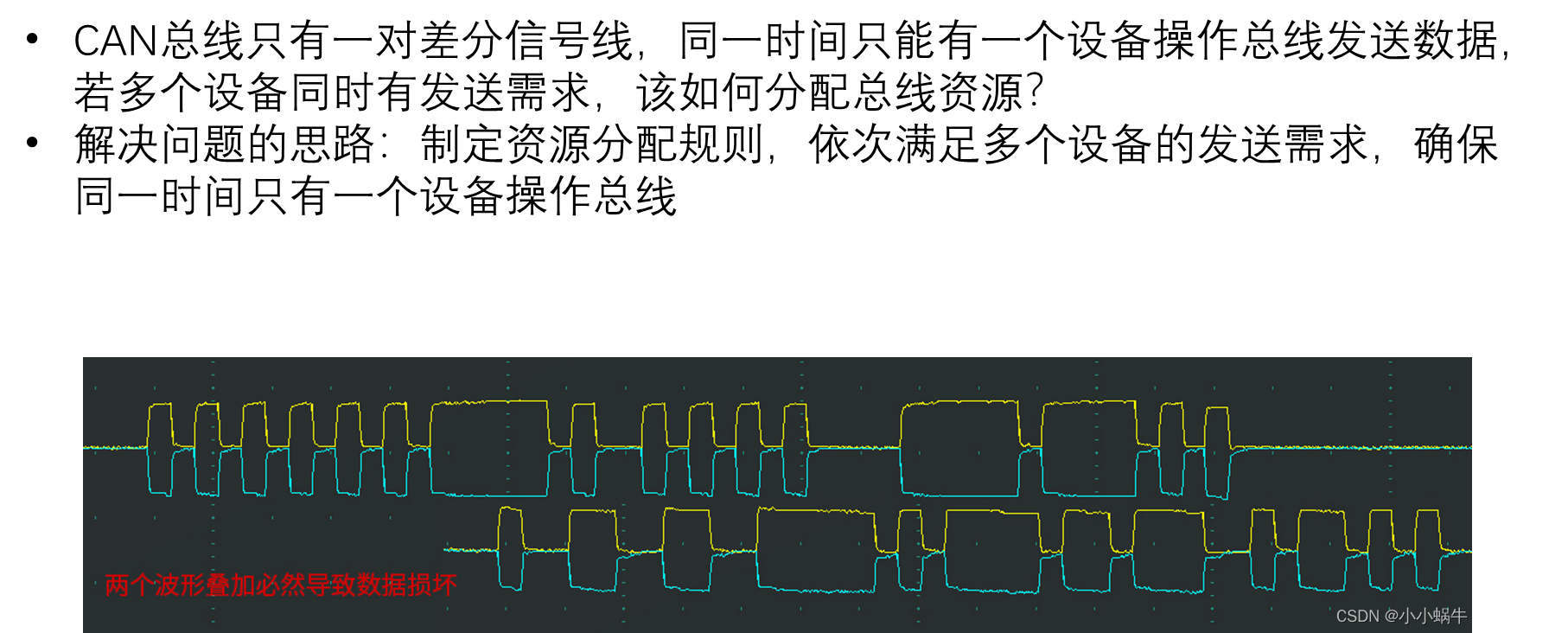
13、资源分配规则1 - 先占先得
•
若当前已经有设备正在操作总线发送数据帧
/
遥控帧,则其他任何设备不能再同时发送数据帧
/
遥控帧(可以发送错误帧
/
过载帧破坏当前数据)
•
任何设备检测到连续
11
个隐性电平,即认为总线空闲,只有在总线空闲时,设备才能发送数据帧
/
遥控帧
•
一旦有设备正在发送数据帧
/
遥控帧,总线就会变为活跃状态,必然不会出现连续
11
个隐性电平,其他设备自然也不会破坏当前发送
•
若总线活跃状态其他设备有发送需求,则需要等待总线变为空闲,才能执行发送需求
14、资源分配规则2 - 非破坏性仲裁
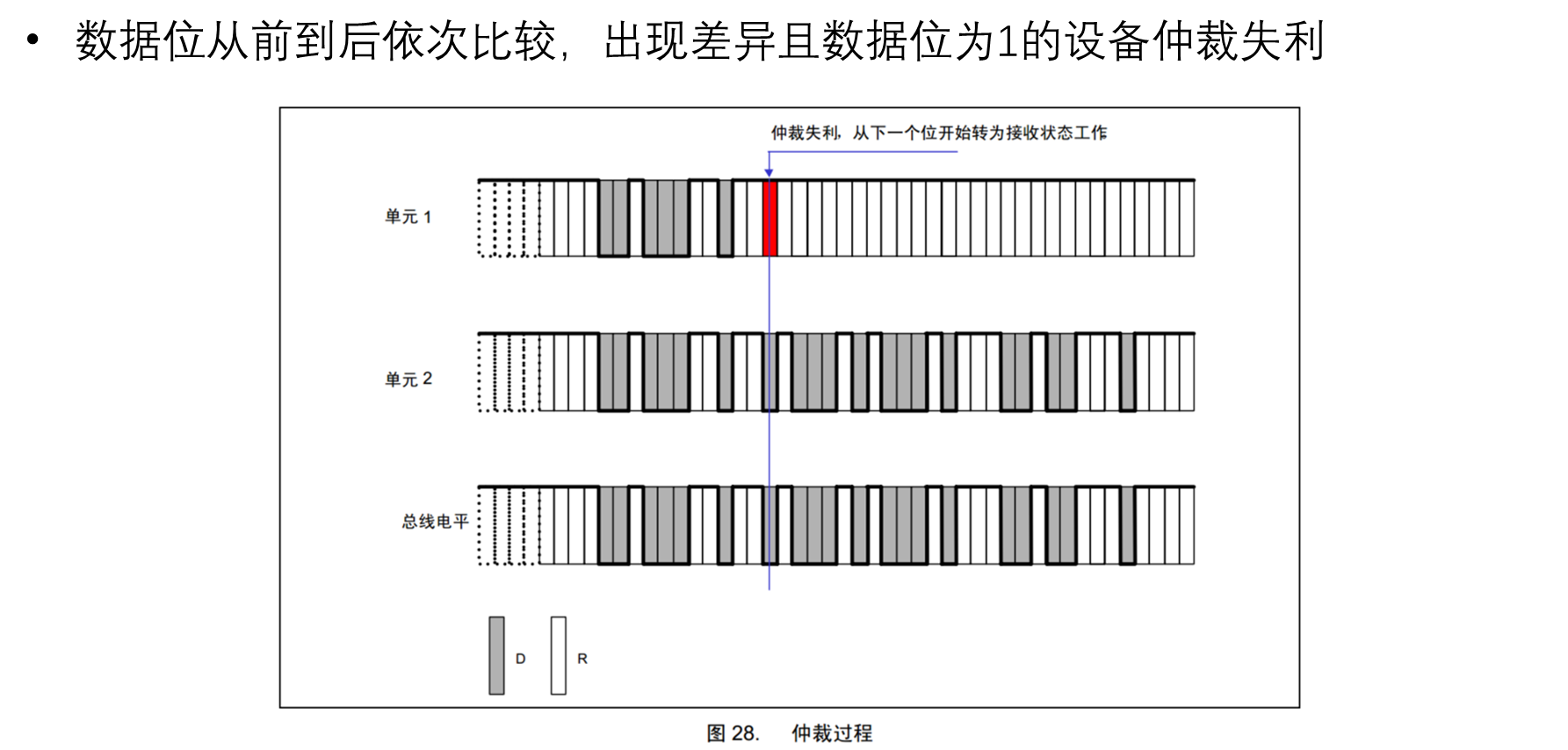
15、非破坏性仲裁过程
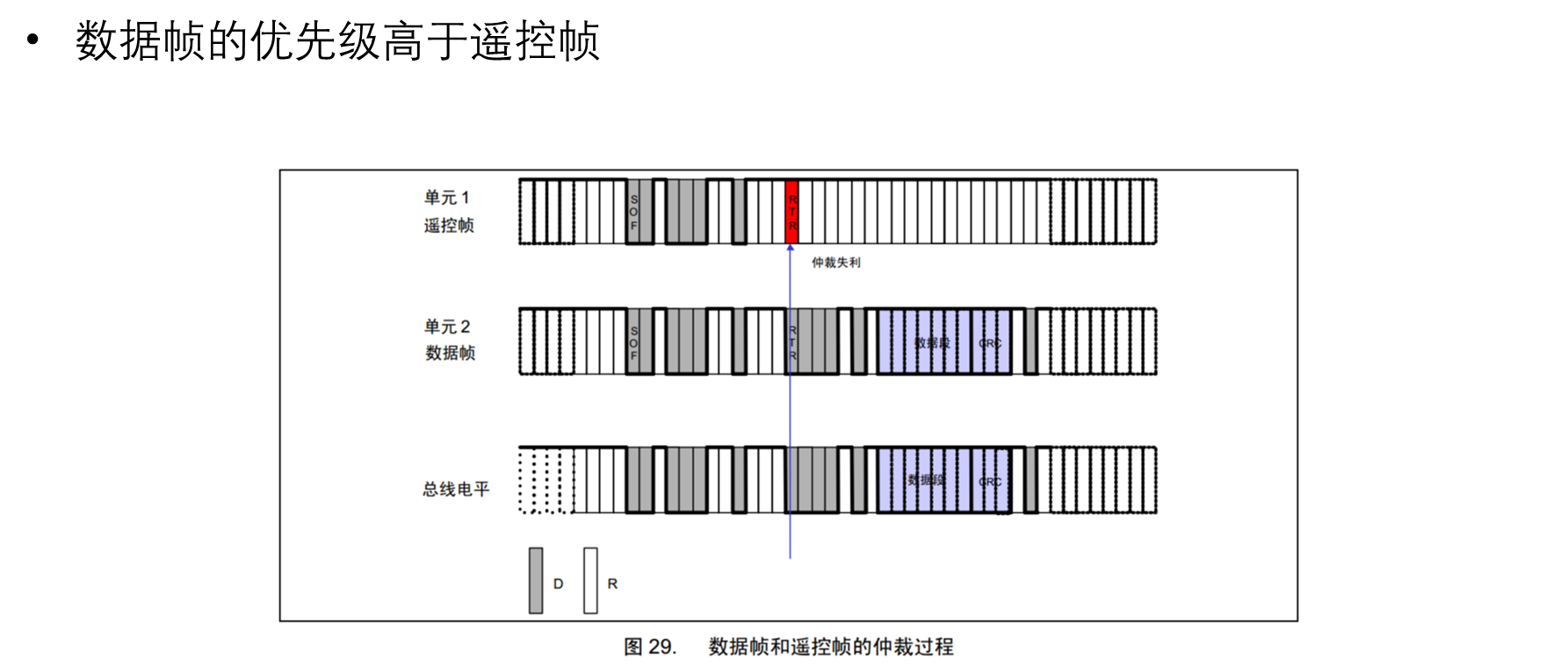
16、数据帧和遥控帧的优先级
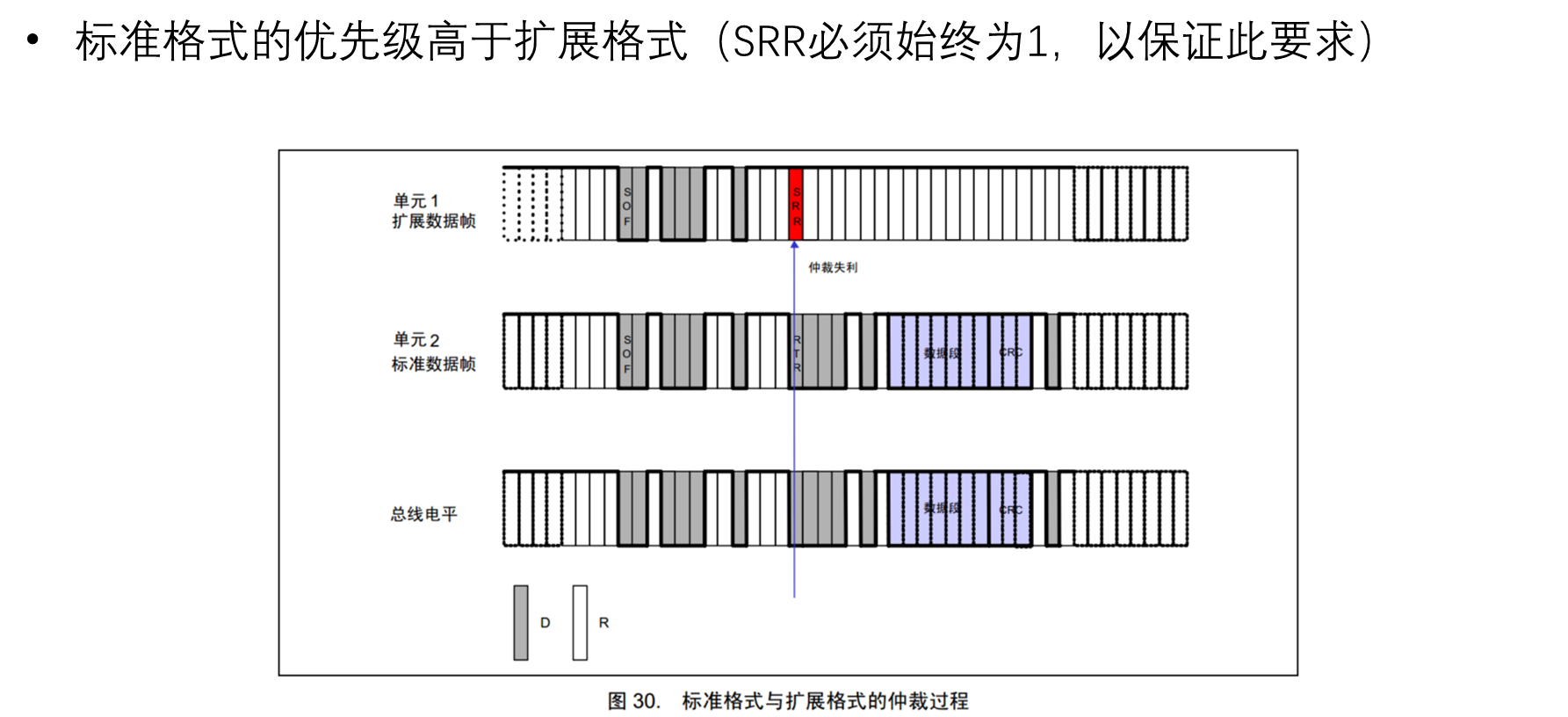
17、标准格式和扩展格式的优先级
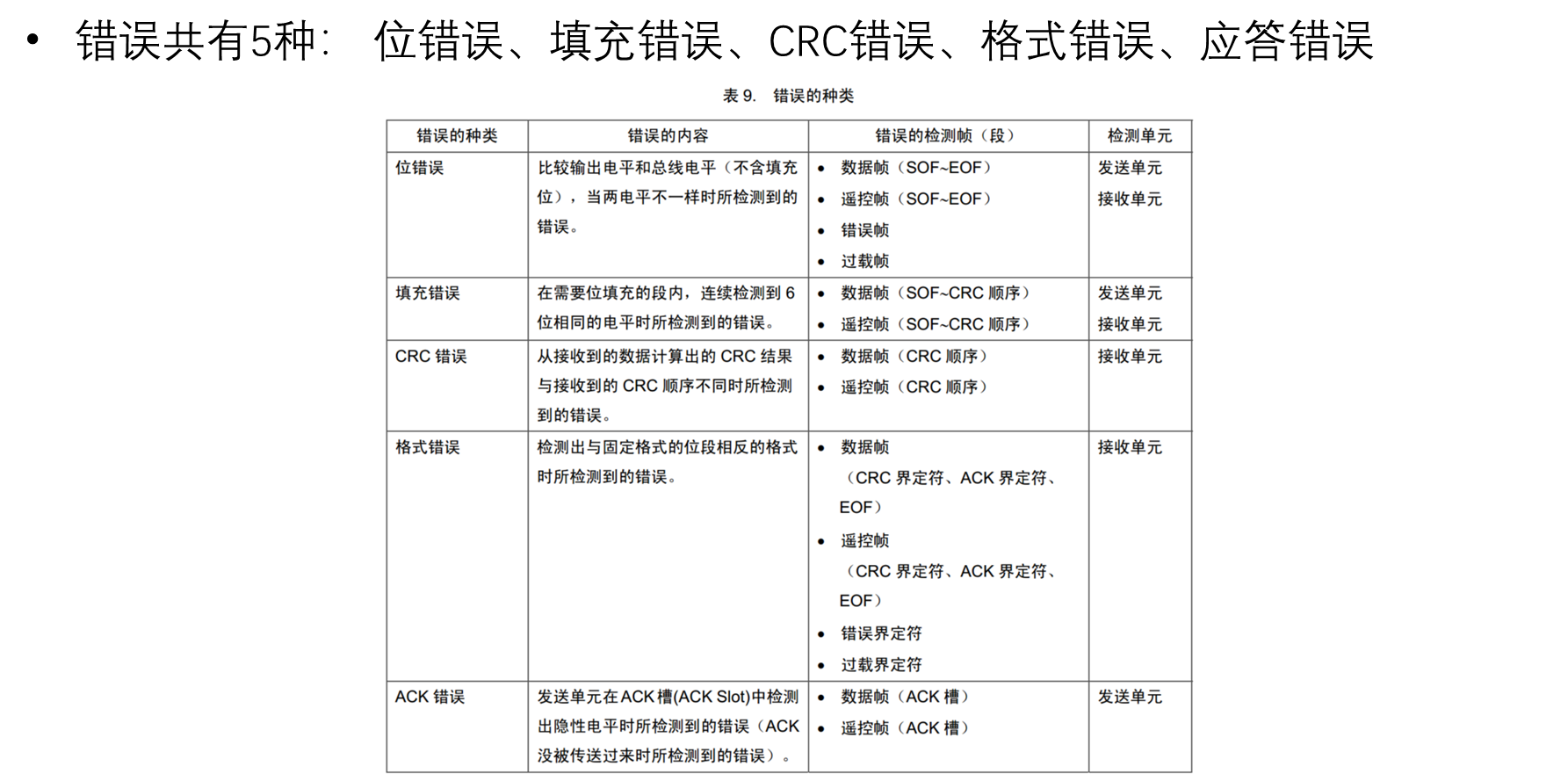
18、错误类型
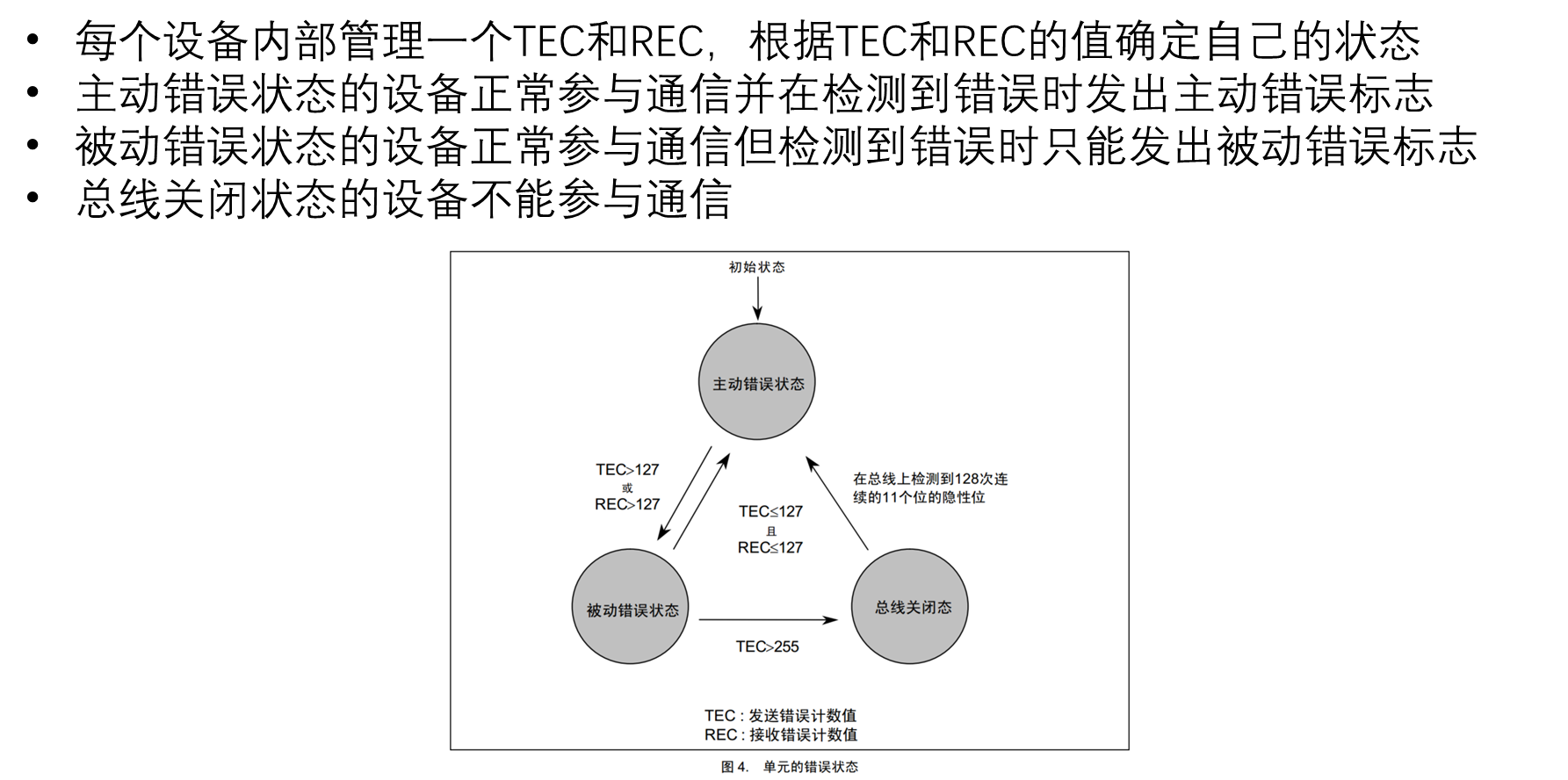
19、错误状态
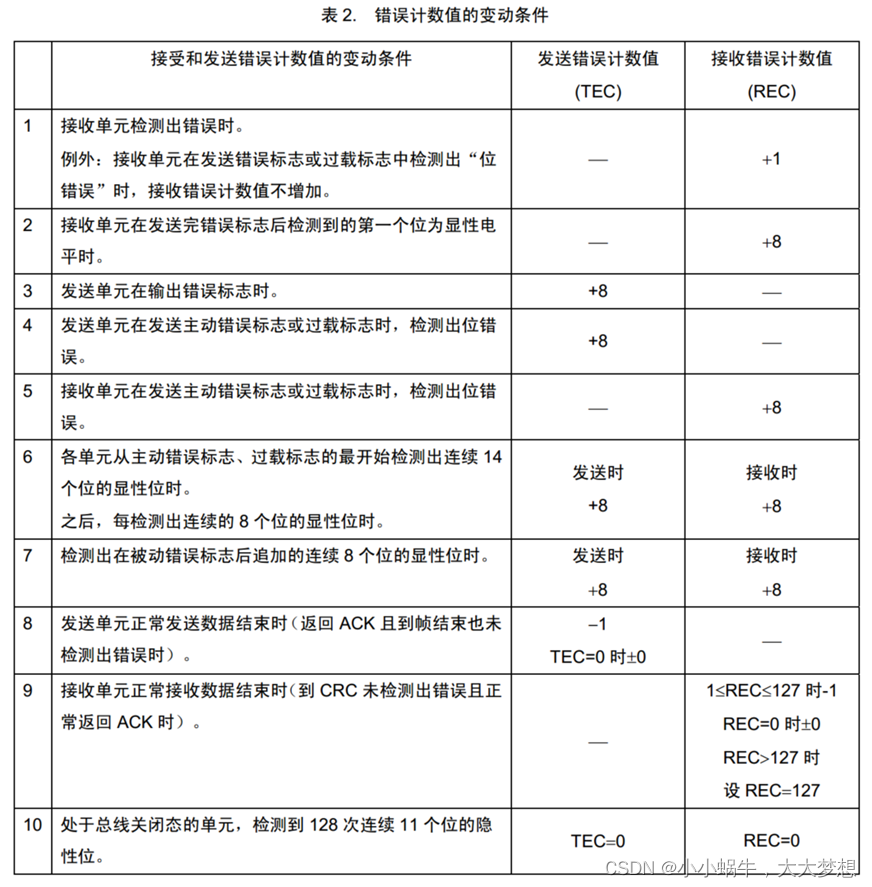
20、错误计数器


















 9946
9946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











