







1.模块化编程思想
模块化编程思想即是一种设计方式,又是一种思维方式,利用模块化可以把一个非常复杂的系统结构细化到具体的功能点,每个功能点看做一个模块,然后通过某种规则把这些小的模块组合到一起,构成模块化系统。
根据外设类型划分模块(文件),也就是采用不同的文件,根据外设不同功能划分模块(函数),也就是采用不同的函数。
在本章我们对LED、按键和串口进行简单的模块化,实现一个同时三个模块的小demo。
2.查看硬件原理图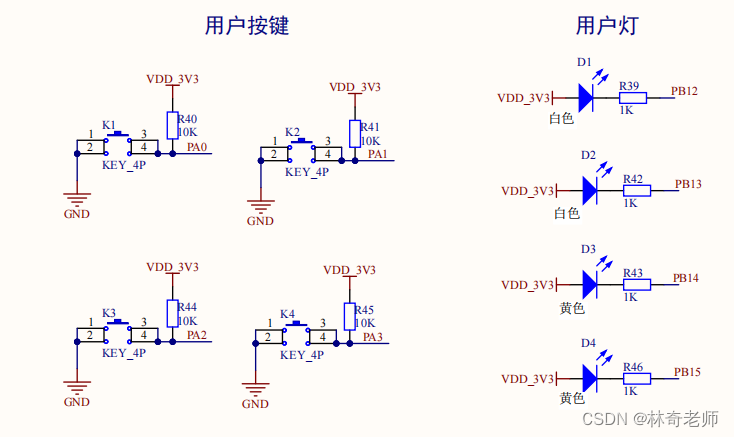

3.创建工程
3.1配置老三样
3.2配置LED和按键

3.3配置串口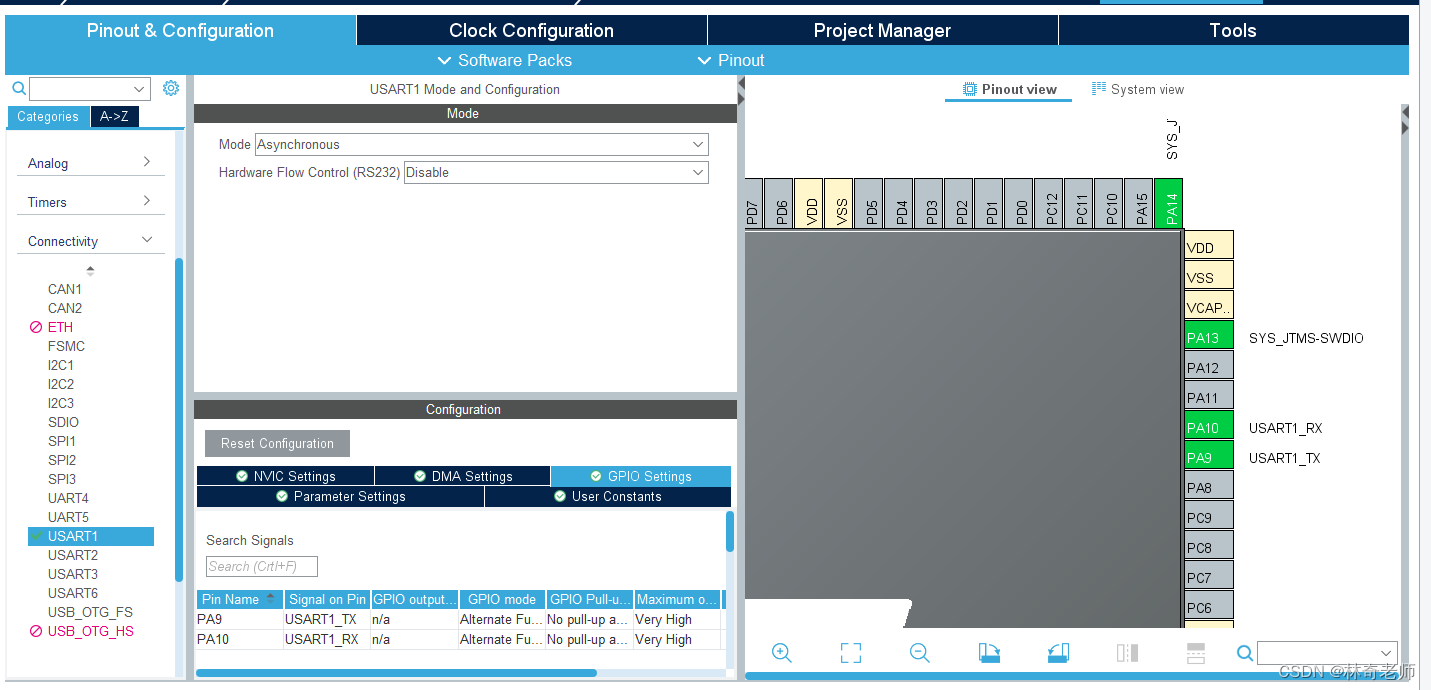
4.模块化编程
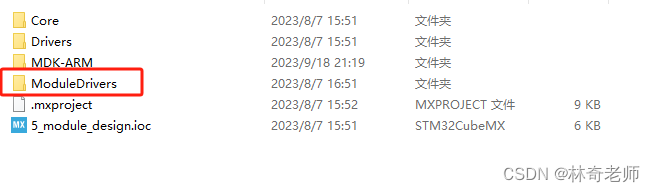
4.1创建文件
首先在创建的工程里新填一个文件夹,用来存放我自己所编写的模块,以及相对应的模块文件如下。
 4.2编写相关的模块化文件
4.2编写相关的模块化文件
4.2.1LED
/*drv_led.c*/
#include "drv_led.h"
#include "stm32f4xx_hal.h"
int LedDrvInit(BoarLed led)
{
switch(led)
{
case D1:
{
break;
}
case D2:
{
break;
}
case D3:
{
break;
}
case D4:
{
break;
}
default:break;
}
return 0;
}
int LedDrvWrite(BoarLed led,Ledstatus status)
{
switch(led)
{
case D1:
{
HAL_GPIO_WritePin(D1_PORT,D1_PIN,(GPIO_PinState)status);
break;
}
case D2:
{
HAL_GPIO_WritePin(D2_PORT,D2_PIN,(GPIO_PinState)status);
break;
}
case D3:
{
HAL_GPIO_WritePin(D3_PORT,D3_PIN,(GPIO_PinState)status);
break;
}
case D4:
{
HAL_GPIO_WritePin(D4_PORT,D4_PIN,(GPIO_PinState)status);
break;
}
default:break;
}
return 0;
}
int LedDrvRead(BoarLed led)
{
Ledstatus status = led_on;
switch(led)
{
case D1:
{
status = (Ledstatus)HAL_GPIO_ReadPin(D1_PORT,D1_PIN);
break;
}
case D2:
{
status = (Ledstatus)HAL_GPIO_ReadPin(D2_PORT,D2_PIN);
break;
}
case D3:
{
status = (Ledstatus)HAL_GPIO_ReadPin(D3_PORT,D3_PIN);
break;
}
case D4:
{
status = (Ledstatus)HAL_GPIO_ReadPin(D4_PORT,D4_PIN);
break;
}
default:break;
}
return status;
}
/*drv_led.h*/
#ifndef __DRV_LED_H
#define __DRV_LED_H
typedef enum{
D1 = 1,
D2,
D3,
D4
}BoarLed;
typedef enum{
led_on = 0,
led_off = 1
}Ledstatus;
#define D1_PORT GPIOB
#define D1_PIN GPIO_PIN_12
#define D2_PORT GPIOB
#define D2_PIN GPIO_PIN_13
#define D3_PORT GPIOB
#define D3_PIN GPIO_PIN_14
#define D4_PORT GPIOB
#define D4_PIN GPIO_PIN_15
int LedDrvInit(BoarLed led);
int LedDrvWrite(BoarLed led,Ledstatus status);
int LedDrvRead(BoarLed led);
#endif /* __DRV_LED_H */
4.2.2按键
/*drv_key.c*/
#include "drv_key.h"
#include "stm32f4xx_hal.h"
int KeyDrvInit(BoardKey key)
{
switch(key)
{
case K1:
{
break;
}
case K2:
{
break;
}
case K3:
{
break;
}
case K4:
{
break;
}
default:break;
}
return 0;
}
int KeyDrvRead(BoardKey key)
{
KeyStatus status = isNoPress;
switch(key)
{
case K1:
{
status = (KeyStatus)HAL_GPIO_ReadPin(K1_PORT,K1_PIN);
break;
}
case K2:
{
status = (KeyStatus)HAL_GPIO_ReadPin(K2_PORT,K2_PIN);
break;
}
case K3:
{
status = (KeyStatus)HAL_GPIO_ReadPin(K3_PORT,K3_PIN);
break;
}
case K4:
{
status = (KeyStatus)HAL_GPIO_ReadPin(K4_PORT,K4_PIN);
break;
}
default:break;
}
return status;
}
/*drv_key.h*/
#ifndef __DRV_KEY_H
#define __DRV_KEY_H
typedef enum{
K1 = 1,
K2,
K3,
K4
}BoardKey;
typedef enum{
isPress = 0,
isNoPress = 1
}KeyStatus;
#define K1_PORT GPIOA
#define K1_PIN GPIO_PIN_0
#define K2_PORT GPIOA
#define K2_PIN GPIO_PIN_1
#define K3_PORT GPIOA
#define K3_PIN GPIO_PIN_2
#define K4_PORT GPIOA
#define K4_PIN GPIO_PIN_3
int KeyDrvInit(BoardKey key);
int KeyDrvRead(BoardKey key);
#endif /*__DRV_KEY_H*/4.2.3串口
/*drv_uart.c*/
#include "drv_uart.h"
#include "usart.h"
#include "stm32f4xx_hal.h"
int UartDrvInit(BoarUart uart)
{
switch(uart)
{
case DbgUart:
{
break;
}
case WiFiBtUart:
{
break;
}
default:break;
}
return 0;
}
int UartDrvWrite(BoarUart uart,unsigned char *buf,unsigned int length)
{
int ret = -1;
switch(uart)
{
case DbgUart:
{
HAL_UART_Transmit(&huart1,buf,length,length*5);
break;
}
case WiFiBtUart:
{
break;
}
default:break;
}
return 0;
}
int UarDrvRead(BoarUart uart,unsigned char *buf,unsigned int length)
{
switch(uart)
{
case DbgUart:
{
HAL_UART_Receive(&huart1,buf,length,length*5);
break;
}
case WiFiBtUart:
{
break;
}
default:break;
}
return 0;
}
/*drv_uart.h*/
#ifndef __DRV_UART_H
#define __DRV_UART_H
typedef enum{
DbgUart = 1,
WiFiBtUart
}BoarUart;
#define DbgUart_PORT USART1
#define WiFiBtUart_PORT USART3
int UartDrvInit(BoarUart uart);
int UartDrvWrite(BoarUart uart,unsigned char *buf,unsigned int length);
int UarDrvRead(BoarUart uart,unsigned char *buf,unsigned int length);
#endif /*__DRV_UART_H*/
4.2.4main函数
实现效果为,首先打印一个hello,然后按键按下,LED灯的状态进行反转。
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
LedDrvInit(D1);
KeyDrvInit(K1);
UartDrvInit(DbgUart);
char *c = "hello\r\n";
UartDrvWrite(DbgUart,(unsigned char*)c,strlen(c));
Ledstatus led_1 = led_off;
while (1)
{
if(isPress == KeyDrvRead(K1))
{
HAL_Delay(100);
if(isPress == KeyDrvRead(K1))
{
led_1 =! led_1;
LedDrvWrite(D1,led_1);
HAL_Delay(100);
}
}
}
}














 1969
1969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









