







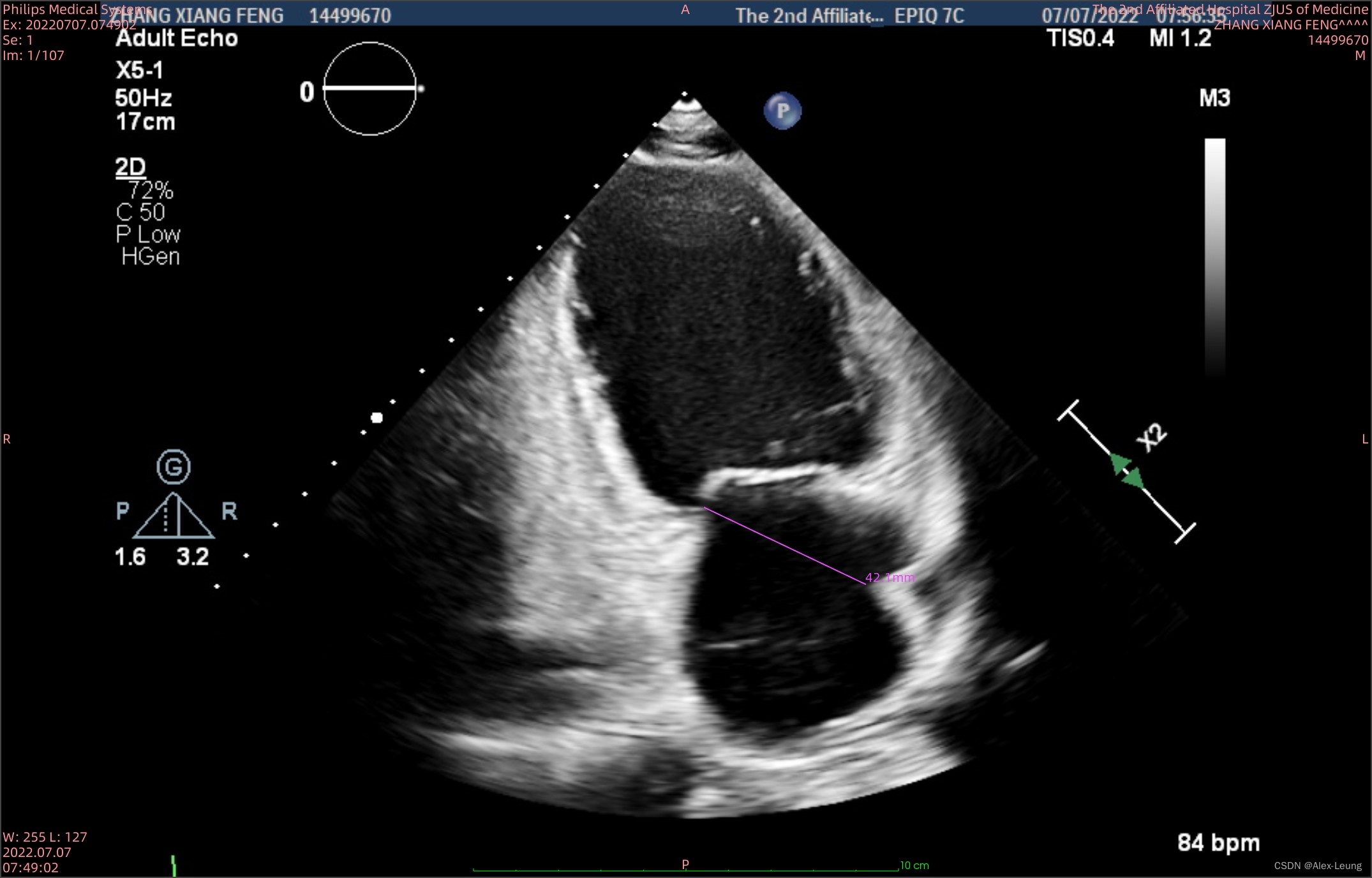
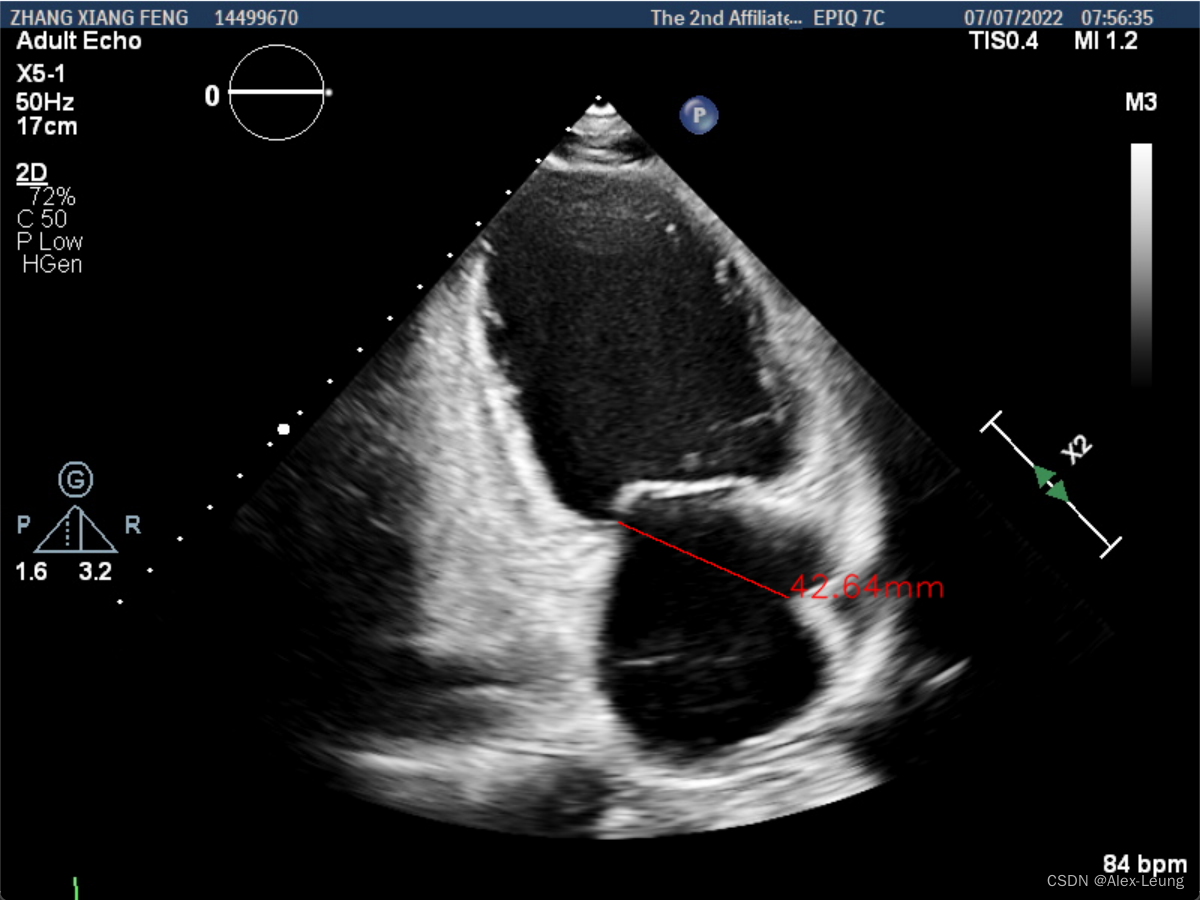
对比测量结果图
DICOM阅读器(小赛看看)测量结果
python测量结果
Code
import numpy as np
import cv2
import math
import pydicom
from pydicom.pixel_data_handlers.util import convert_color_space
ds = pydicom.dcmread("./your_dicom_path.dcm")
# 第几张图, dtype根据Bits Allocated定义
img = np.asarray(ds.pixel_array[0], dtype='uint8')
# 获取色彩空间
color_space = ds.get(0x00280004).value
# 颜色空间转换
img = convert_color_space(img, color_space, 'RGB')
# BGR转RGB
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 像素和真实空间比例尺
autio_x = ds.get(0x00280030).value[0]
autio_y = ds.get(0x00280030).value[1]
p1 = None
p2 = None
# 欧股定理
def cal_euler(p1, p2):
a2 = ((p2[1] - p1[1]) * autio_x) ** 2
b2 = ((p2[0] - p1[0]) * autio_y) ** 2
res = math.sqrt(a2 + b2)
return res
# 鼠标事件
def mouseHandler(event, x, y, flags, param):
global p1, p2
if event == cv2.EVENT_LBUTTONDOWN:
point = (x, y)
if p1 == None:
p1 = point
else:
p2 = point
print(point)
cv2.destroyAllWindows()
cv2.namedWindow('p1')
cv2.setMouseCallback('p1', mouseHandler)
cv2.imshow('p1', img)
cv2.waitKey()
cv2.namedWindow('p2')
cv2.setMouseCallback('p2', mouseHandler)
cv2.imshow('p2', img)
cv2.waitKey()
res = cal_euler(p1, p2)
img = cv2.line(img, p1, p2, (0, 0, 255), 1, 1)
cv2.putText(img, str(round(res, 2)) + "mm", p2, cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 1, cv2.LINE_AA)
cv2.imshow('res', img)
cv2.waitKey()
















 474
474











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











