







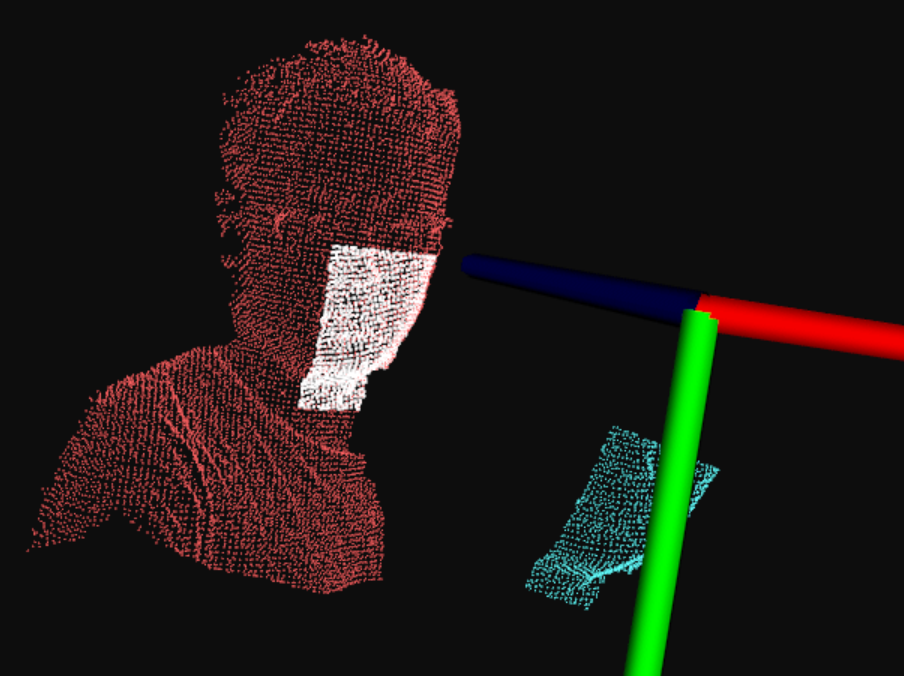
我们来解决更高实际的需求,将先前捕获的对象模型与新捕获的数据对齐。我们将拍摄一个包含一个人的深度图像,并尝试拟合先前捕获的人脸模板(1个或多个);以确定场景中人脸的位置和方向。深度图及模板图如下:
#include <limits>
#include <fstream>
#include <vector>
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/fpfh.h>
#include <pcl/registration/ia_ransac.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/search/impl/search.hpp>
typedef pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> PCLHandler;
class FeatureCloud {
p
 订阅专栏 解锁全文
订阅专栏 解锁全文
















 3198
3198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











