



二郎就不设置什么VIP可见啥的了,这样大家都能看到。
如果觉得受益,可以给予一些打赏,也算对原创的一些鼓励,谢谢。
钱的用途:1)布施给他人;2)二郎会有更多空闲时间写教程
起因:
二郎虽然也对TDOA和CRLB有所了解,而且写了一些相关的代码,但是还是觉得不够透彻,不能非常好地去教给别人,所以,本专题,二郎就用代码和解释并行,一步一步和大家说明,公式是怎么代码实现的,以及怎么仿真的。
论文《A Simple and Efficient Estimator for Hyperbolic Location》
仿真:
| 1)初始配置 |
clc; close all; clear all; warning off; % 程序初始化。
L = 10e3; % 蒙特卡洛运行次数。
randn('seed',0); % 初始化随机数生成器。
uo = [-50 250]'; % 真实源位置。
x = [0 -5 4 -2 7 -7 2 -4 3 1]; % 真实传感器位置矩阵。
y = [0 8 6 4 3 5 5 2 3 8];
S = [x; y];
M = size(S,2); % 传感器数量。
N = size(S,1); % 定位维度。
ro = sqrt(sum((uo*ones(1,M)-S).^2))'; % 真实源-传感器的距离
rdo = ro(2:end)-ro(1); % 距离差,其他距离与第一个距离的差
R = (eye(M-1)+ones(M-1))/2; % TDOA 的协方差结构
论文对应:
1)距离差

2)协方差结构
论文原文

matlab运行结果

| 2)噪声变化配置 |
NsePwrVecdB = -60:4:-24; % 改变测量噪声水平
fprintf('模拟进行中');
for nseIdx = 1:length(NsePwrVecdB), % 改变测量噪声水平
fprintf('。');
nsePwr = 10^(NsePwrVecdB(nseIdx)/10);
Q = nsePwr * R; % TDOA(范围差)噪声的协方差矩阵



这里Q = nsePwr * R; 是噪声的线性功率值乘以单位协方差矩阵,构建出实际的协方差矩阵。
| 3)CRLB |
crlb(nseIdx) = trace(TDOALocCRLB(S,uo,Q));
用迹是把x,y,z方向的误差方差相加
function [CRLB] = TDOALocCRLB(SensorPositions, SourceLocation, Q)
% SensorPositions: (Dim x M) 矩阵,每一列是一个传感器的位置,第一列是参考传感器
% SourceLocation: (Dim x 1) 源位置
% Q: TDOA(范围差)向量的协方差矩阵
% CRLB: (Dim x Dim) 估计源定位的 CRLB 矩阵
% 通过输入我们就能看出,求CRLB是和传感器位置、源位置、协方差矩阵有关的
M = length(Q) + 1;
if (M < size(SensorPositions, 1) + 2)
fprintf('传感器数量至少应为 %d\n', size(SensorPositions, 1) + 2);
return;
end;
if (rank(SensorPositions) < size(SensorPositions, 1))
disp('传感器不应位于同一平面或直线上!');
return;
end
S = SensorPositions;
u = SourceLocation;
M = size(SensorPositions, 2);
ro = sqrt(sum((u * ones(1, M) - S).^2)); %传感器和声源的距离
d_u = (S(:, 2:end) - u * ones(1, M - 1))' ./ (ro(2:end)' * ones(1, size(S, 1))) ...
- ones(M - 1, 1) * ((S(:, 1) - u)' / ro(1));
J = d_u' * inv(Q) * d_u; % FIM
CRLB = inv(J);
论文对应:
1)Gt
d_u = (S(:, 2:end) - u * ones(1, M - 1))' ./ (ro(2:end)' * ones(1, size(S, 1))) ...
- ones(M - 1, 1) * ((S(:, 1) - u)' / ro(1));

对应-Gt,这个负号其实没关系,因为有两个,相当于负负得正,还是一样的。
2)公式求解
c是信号传播速度,由于使用的r,不涉及速度,因此c=1。
J = d_u' * inv(Q) * d_u; % FIM
CRLB = inv(J);

我们这里再重新体验一遍CRLB的推导过程
①构建测量值的似然函数,这里测量值是r


一般情况下会转换成对数函数,方便求解
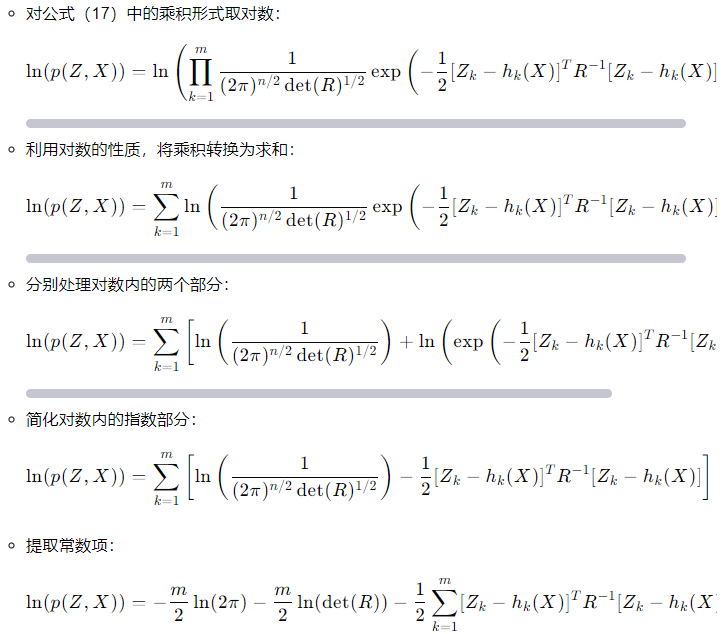
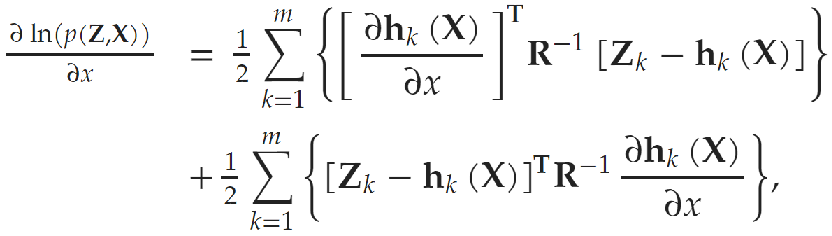
这里也涉及求导,两数相乘,前导后不导加上后导前不导
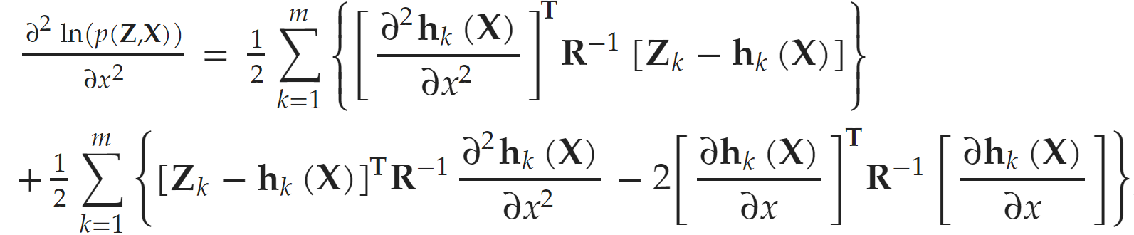
二阶导也是一样
这里还有个关键点就是求期望,Zk的期望等于hk
因此

②对对数似然函数进行求导

Fisher 信息矩阵是一个 n×n 矩阵(n个带噪声的测量值),其元素由对数似然函数的二阶偏导数的期望值组成。
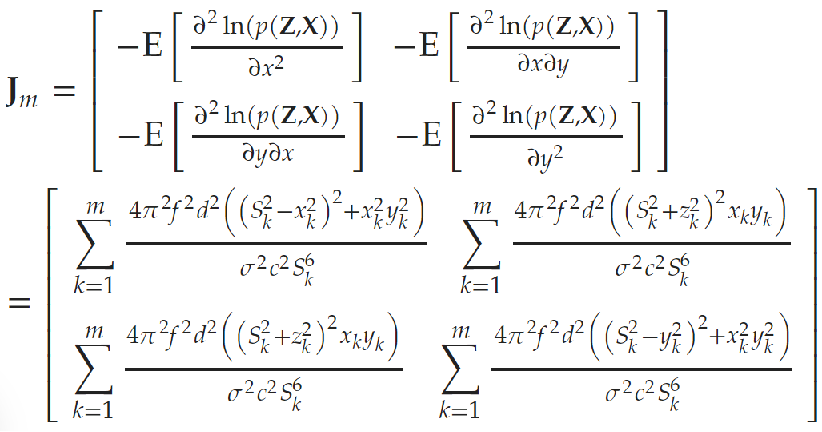
③构建zp的CRLB,对数似然函数的求导的积求期望

④得到FIR函数的形式后求逆,得到CRLB

| 4)求TDOA的过程---蒙特卡洛 |
SimulationMSE = 0;
for k = 1 : L, % 蒙特卡洛模拟。
rdNse = sqrt(nsePwr/2) * randn(M,1);
rd = rdo + rdNse(2:end)-rdNse(1); % 噪声源 TDOAs(范围差)。
u = TDOALoc(S,rd,Q);
SimulationMSE = SimulationMSE + norm(u-uo,2)^2; %多次计算的误差平方累加
end;
mse(nseIdx) = SimulationMSE/L;
Si=(xi−x0)2+(yi−y0)2S_i = (x_i - x_0)^2+(y_i - y_0)^2Si=(xi−x0)2+(yi−y0)2
result=(S1+S2+……+Sn)/Nresult = (S_1+S_2+……+S_n)/Nresult=(S1+S2+……+Sn)/N
| 5)求TDOA的过程---两步法---第一步 ---认为x,y和r无关 |
function [SourceLocation] = TDOALoc(S, r, Q)
% S: (Dim x M) 矩阵,每一列是一个传感器的位置,第一列是参考传感器,M 是传感器的数量,至少应为 Dim+2
% r: (M-1) x 1 的 TDOA 测量值乘以信号传播速度
% Q: r 向量的协方差矩阵
% SourceLocation: 估计的源位置
RptCnt = 1; % 第一阶段重新计算 W1 的重复次数
M = length(r) + 1;
R = sqrt(sum(S.^2))';
%=========== 构建相关向量和矩阵 ============
h1 = r.^2 - R(2:end).^2 + R(1)^2;
G1 = -2 * [S(:, 2:end)' - ones(M-1, 1) * S(:, 1)', r];
%============= 第一阶段 ===================================
B = eye(M-1);
W1 = inv(B * Q * B');
u1 = inv(G1' * W1 * G1) * G1' * W1 * h1;
for j = 1:max(1, RptCnt),
ri_hat = sqrt(sum((S - u1(1:end-1) * ones(1, M)).^2));
B = 2 * diag(ri_hat(2:M));
W1 = inv(B * Q * B');
u1 = inv(G1' * W1 * G1) * G1' * W1 * h1;
end
u1p = u1 - [S(:, 1); 0];
程序对应
1)构建相关向量和矩阵
%=========== 构建相关向量和矩阵 ============
h1 = r.^2 - R(2:end).^2 + R(1)^2;
G1 = -2 * [S(:, 2:end)' - ones(M-1, 1) * S(:, 1)', r];





2)初始迭代
B = eye(M-1);
W1 = inv(B * Q * B');
u1 = inv(G1' * W1 * G1) * G1' * W1 * h1;


这是初始迭代,我们的权重设置的是对角线矩阵,也就是第一次只和协方差矩阵有关
3)获得初始的u1,然后完成权重的获取
for j = 1:max(1, RptCnt),
ri_hat = sqrt(sum((S - u1(1:end-1) * ones(1, M)).^2));
B = 2 * diag(ri_hat(2:M));
W1 = inv(B * Q * B');
u1 = inv(G1' * W1 * G1) * G1' * W1 * h1;
end
这里有点差别,它没有用ri1r_{i1}ri1,而是直接用声源的xxx和yyy,获得距离,进而按照距离进行加权


| 6)求TDOA的过程---两步法---第二步---弥补第一步无关引入的误差 |
u1p = u1 - [S(:, 1); 0];
%========== 第二阶段 =====================================
h2 = u1p.^2;
G2 = [eye(length(u1p) - 1); ones(1, length(u1p) - 1)];
B2 = 2 * diag(u1p);
W2 = inv(B2') * (G1' * W1 * G1) * inv(B2);
u2 = inv(G2' * W2 * G2) * G2' * W2 * h2;



计算出来的结果是平方的形式,需要利用之前求的结果,给出正负号
%=========== 映射 ========================================
SourceLocation = sign(diag(u1p(1:length(u2)))) * sqrt(abs(u2)) + S(:, 1);
%============================================================
至此,完成了求解,之后可以展示结果
结果展示:
mse(nseIdx) = SimulationMSE/L;
end;
fprintf('\n');
% 绘制结果。
figure(1); plot(NsePwrVecdB/2,10*log10(mse),'xk','MarkerSize',8); hold on;
plot(NsePwrVecdB/2,10*log10(crlb),'k'); grid on; hold off;
xlabel('10 log(c\sigma)');
ylabel('10 log(MSE)');
legend('新方法','CRLB');
ylim([0 60]);



















 9140
9140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









