






永磁同步电机PMSM三环位置速度电流伺服控制系统控制模型
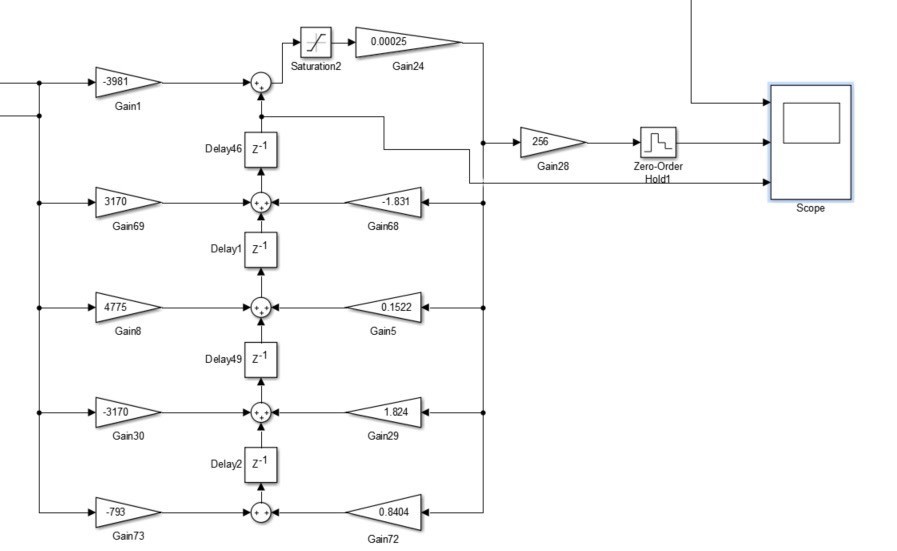
线性自抗扰LADRC控制+电流转矩前馈
控制效果好,系统稳定
ID:87200692075655744
自由随风
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为一种高性能、高效能的电机,被广泛应用于各个领域。在实际应用中,对于PMSM的控制是一个至关重要的问题,其中位置、速度和电流伺服控制系统控制模型是其中的关键。
为了实现对PMSM的精确控制,传统的控制方法很难满足高性能的要求。因此,我们引入了一种新的控制方法——线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC),该方法能够有效克服系统模型非线性和外部干扰的影响,提高控制系统的稳定性和精度。
LADRC控制方法在PMSM的控制中具有独特的优势。首先,LADRC采用了多环控制结构,将系统分为主环、速度环和电流环。其中,主环通过对位置误差的补偿,实现对电机位置的精确控制;速度环通过对速度误差的补偿,实现对电机速度的精确控制;电流环通过对电流误差的补偿,实现对电机电流的精确控制。
其次,LADRC控制方法还引入了自抗扰补偿器和前馈补偿器。自抗扰补偿器能够实时估计和补偿系统内外部的干扰,从而提高系统鲁棒性;前馈补偿器能够预测系统未来的干扰,通过提前对干扰进行补偿,进一步提高系统的控制性能。
在实际应用中,我们通过实验验证了LADRC控制方法在PMSM控制中的有效性。实验结果表明,采用LADRC控制方法的PMSM控制系统具有较好的控制效果和较高的稳定性。通过对比分析,我们发现,相比传统的控制方法,LADRC控制方法能够更好地抑制系统非线性和外部干扰的影响,提高系统的响应速度和抗干扰能力。
综上所述,基于线性自抗扰控制方法的PMSM控制系统能够实现对永磁同步电机的精确控制。该控制方法通过引入多环控制结构、自抗扰补偿器和前馈补偿器,提高了系统的稳定性和控制精度。通过实验验证,该控制方法在PMSM控制中具有良好的控制效果,能够满足高性能控制的需求。因此,LADRC控制方法在永磁同步电机的控制中具有广阔的应用前景。
总结起来,本文介绍了永磁同步电机的三环位置速度电流伺服控制系统模型,并提出了一种新的控制方法——线性自抗扰控制(LADRC)。通过对LADRC控制方法的介绍和实验验证,我们发现该方法在PMSM控制中具有较好的控制效果和系统稳定性。相信在未来的研究和应用中,LADRC控制方法将会得到广泛的应用和推广。
相关的代码,程序地址如下:http://fansik.cn/692075655744.html
















 7784
7784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









