






视频:
【无人机飞控科研入门经验分享】嬛嬛,朕读不下去啦_哔哩哔哩_bilibili
无人机的三个方向
1.制导(路径规划)一般是 三维的路径规划
非凸优化是什么意思
非凸优化指的是在优化问题中,目标函数可能存在多个局部极小值或极大值,且这些局部极值点不一定是全局极值点。在非凸优化问题中,顺着梯度方向走到底只能保证是局部最优,不能保证是全局最优。这类问题因其求解的复杂性和挑战性而闻名,通常求解全局最优的算法复杂度是指数级的(NP难)
两分块优化是一种特殊的非凸优化方法,它通过将一个大的优化问题分解成两个或更多的小问题来处理,每个小问题都相对容易解决。这种方法在处理非凸问题时特别有用,因为它可以简化问题的结构,从而更容易找到局部最优解。然而,这并不意味着找到了所有局部最优解就找到了全局最优解,因为非凸问题的特性决定了可能存在多个局部最优解,而每个小问题的解可能只是其中之一。
2.控制(飞行控制)
单个无人机控制、集群无人机控制
3.导航(感知估计)

学习无人机的三个阶段
第一阶段: 阅读行业文献
1. 广泛的阅读行业的综述文献,行业综述文献 不同于算法综述文献,行业综述文献可以了解到无人机发展到什么程度了。 例如: 单个无人机的 轨迹跟踪控制研究已经比较成熟了 所以可能会没有前沿性。
2.找一些程序,去体验,体验编程的难度。 路径规划的程序大部分基于 MatLab或者Python的纯代码。 而做控制的话 会涉及到 simulink 的图形化编程。

推荐 北航的四本 多旋翼飞行器设计与控制实践
以及 可靠飞行研究组 和 航空学报CJA 两个公众号

第二阶段 学习阶段
1.学习仿真编程

2.认识实验对象,去认识无人机,
因为我个人现阶段做硬件 所以一定要熟悉无人机的控制硬件,算法之类的还可以暂时不接触
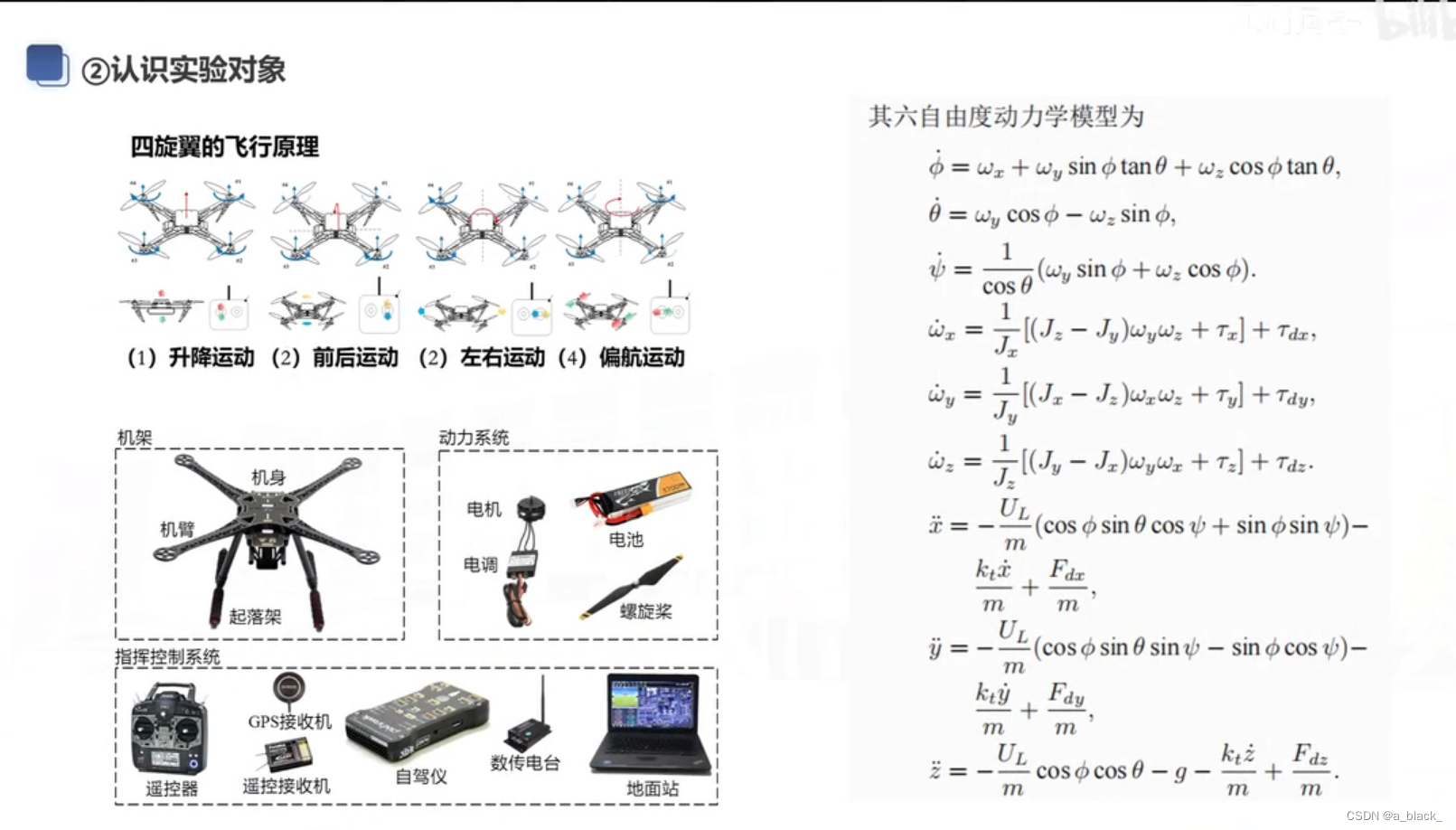
 了解一些相关的实验平台,仿真 硬件之类的控制流程。
了解一些相关的实验平台,仿真 硬件之类的控制流程。



3.学习论文 (找创新点的阶段)
4.学习算法


 第三阶段:研究阶段
第三阶段:研究阶段


自动化领域的期刊


















 141
141











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









