







关键特性包括:
-
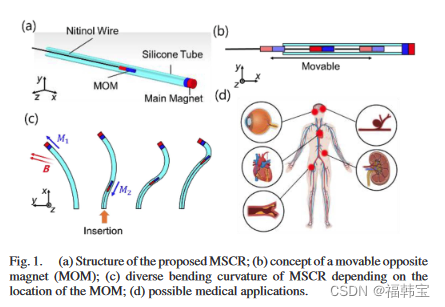
设计特点:机器人由柔性的硅胶管、一端固定的永久磁铁和通过镍钛合金线操控的可移动相反磁铁组成。MOM的位置可调,使得机器人能形成S形等复杂曲线,特别适合在如尿道、心脏、眼科或脑血管介入等精细且路径复杂的手术中应用。
-
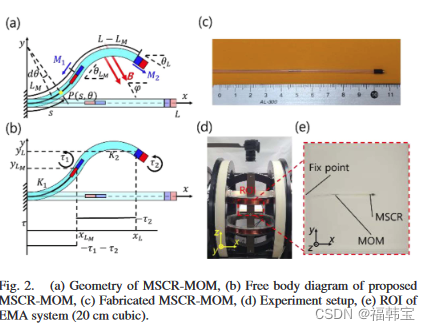
动力学模型:研究通过伯努利-欧拉梁理论建立了MSCR-MOM的运动学模型,考虑了机器人在不同段落的弯曲刚度,以及外部磁场对机器人形态的影响。模型帮助预测机器人在不同磁场配置下的姿态和位置。
-
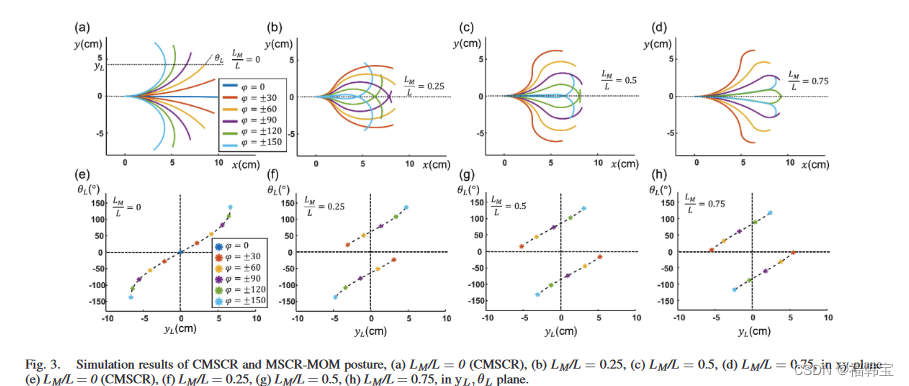
实验验证:通过实验和模拟验证了模型的有效性,展示了机器人在不同外部磁场角度下的多样化姿态,证实了工作空间的显著扩展。实验包括使用实体肾脏和眼球模型进行的导航测试,证明了在复杂受限空间中操作性能的提升。
### 文章概述
本文提出了一种新型的磁性软连续机器人(MSCR),即可移动相反磁铁的MSCR(MSCR-MOM),旨在解决现有磁性软连续
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4455
4455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









