







 ### 文章概述
### 文章概述
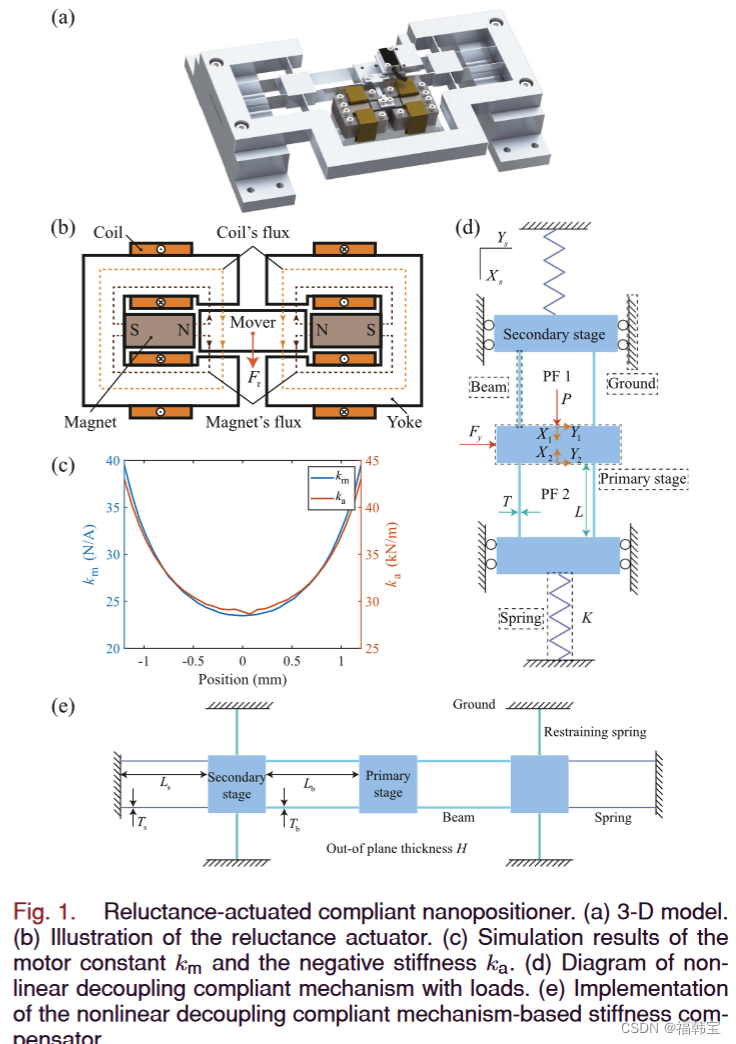
本文提出了一种利用 Compliance 补偿器改善大行程(>1mm)混合阻抗驱动纳米定位器非线性特性的方法。通过建立系统等效刚度与阻抗及补偿器综合效应之间的关系,采用一种新颖的非线性解耦机制,显著减小了系统等效刚度的波动,从而实现了高级模型控制和高精度运动。此外,文中建立了与原子力显微镜兼容的原型系统,并采用优化的带通损耗滤波器进行了重复控制验证,结果显示,在2mm三角波(1Hz)和20μm三角波(80Hz)下,系统的精确定位误差分别为17.6nm(RMSE)和8.2nm(RMSE),进一步通过原子力显微镜验证了系统在大范围和高速扫描中的性能。这些结果表明,所提系统对于毫米级应用具有重要意义,有望推动大型行程阻抗驱动纳米定位器的发展和应用。这项工作得到了中国国家自然科学基金部分资助以及先进装备摩擦学国家重点实验室的部分支持。
### 关键要点
1. 研究提出了一种大型迟滞阻尼器驱动的纳米定位器,以减少非线性影响并提高精度和控制性能。
2. 系统利用刚度补偿器来降低迟滞阻尼器的非线性效应,并建立了系统等效刚度与阻尼器和刚度补偿器共同作用之间的关系。
3. 基于一种新颖的非线性解耦机制,显著降低了系统的等效刚度波动,实现了高级基于模型的控制和高精度运动。
4. 实验结果表明,该系统在大范围和高速扫描中具有纳米级精度,并且通过原子力显微镜验证了其能力。
5. 这项研究为使用大型迟滞阻尼器驱动的纳米定位器解决毫米级应用问题提供了重要进展。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















07-13
 1096
1096
1096
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









