







 本文介绍了一次基于STM32MP157A的PWM实验,通过PWM技术控制蜂鸣器、风扇和马达的工作。实验中详细阐述了GPIO、RCC和TIM模块的初始化过程,以及针对不同设备的配置区别,如管脚设置、寄存器配置等,并提供了关键代码段。
本文介绍了一次基于STM32MP157A的PWM实验,通过PWM技术控制蜂鸣器、风扇和马达的工作。实验中详细阐述了GPIO、RCC和TIM模块的初始化过程,以及针对不同设备的配置区别,如管脚设置、寄存器配置等,并提供了关键代码段。
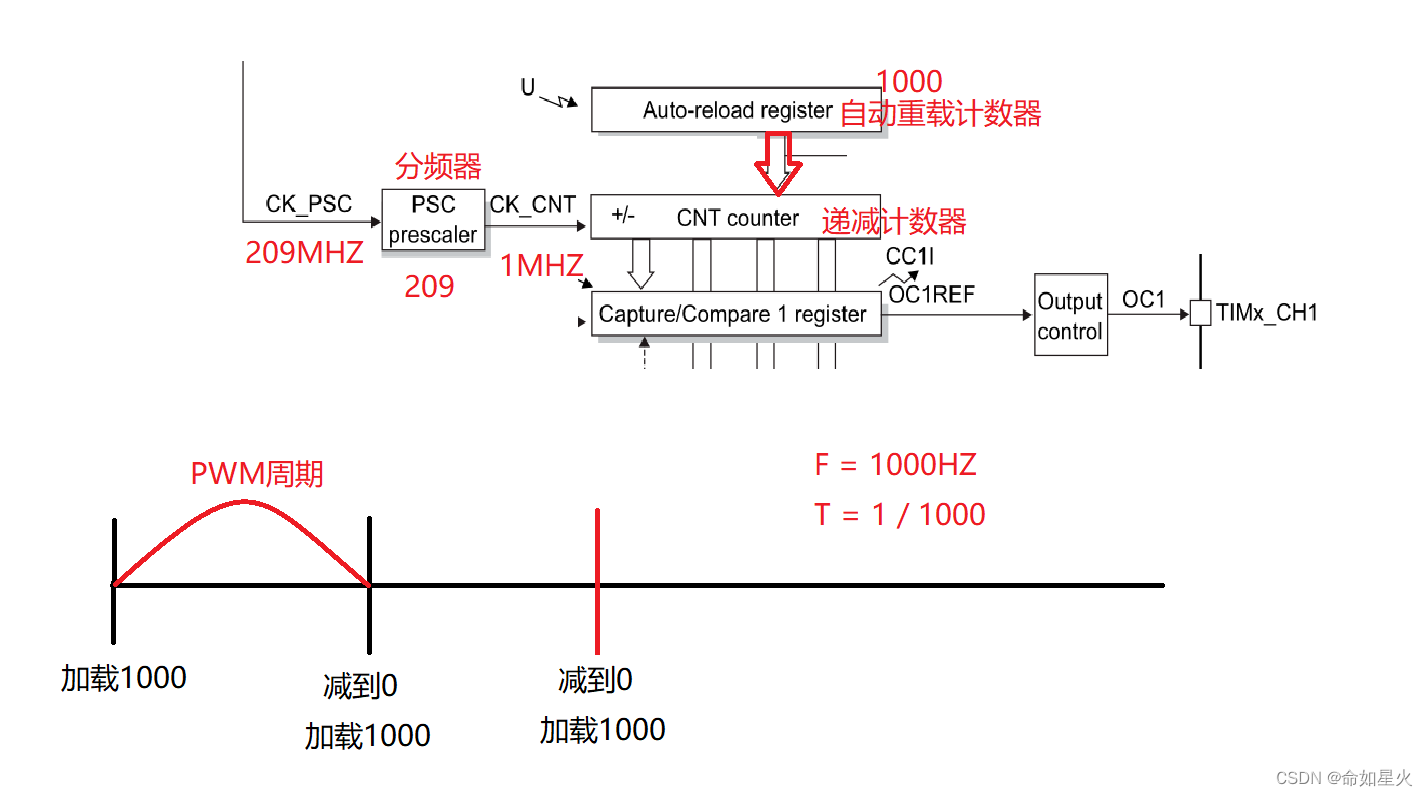
pwm(脉冲宽度调制),简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。本次实验通过PWM产生一个方波来驱动蜂鸣器、风扇、马达。
分析电路图可知鸣器、风扇、马达对应的管脚为TIM4_CH1---->PB6 TIM1_CH1---->PE9 TIM16_CH1---->PF6。通过在串口工具中输入gpio toggle +<pin>命令可检查硬件是否完好
代码实现——以蜂鸣器为例
一、pwh.h——头文件的包络和功能函数的声明
其中三个头文件中定义了所有gpio、rcc、tim章节的管脚定义
#ifndef __PWM_H__
#define __PWM_H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_tim.h"
//RCC章节初始化
void fm_rcc_init();
//GPIO章节初始化
void fm_gpio_init();
//TIM4章节初始化
void fm_tim4_init();
#endif二、pwm.c——功能函数的定义
1、rcc章节初始化——时钟使能
void fm_rcc_init()
{
//GPIOB使能
RCC->MP_AHB4ENSETR |= (0x1 << 1);
//TIM4EN使能
RCC->MP_APB1ENSETR |= (0x1 << 2);
}
2、gpio章节初始化——设置蜂鸣器对应的管脚为AF2复用模式
void fm_gpio_init()
{
//设置PB6引脚为复用模式
GPIOB->MODER &= (~(0x3 <<12));
GPIOB->MODER |= (0x1 << 13);
//设置PB6引脚功能为AF2--->TIM4_CH1
GPIOB->AFRL &= (~(0xf << 24));
GPIOB->AFRL |= (0x1 << 25);
}3、tim4章节初始化
1)配置TIM4_PSC寄存器
TIM4->PSC &= (~(0xffff << 0));
TIM4->PSC |= (0xD0 << 0);2)配置TIM4_ARR寄存器——影响周期和频率
TIM4->ARR &= (~(0xffff << 0));
TIM4->ARR |= (0x3E8 << 0);3)配置TIM4_C
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2847
2847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











