







 一.舵机介绍1.舵机简介舵机(英文叫Servo):它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。最早的舵机是船舶上的一种大甲板机械。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小,通过发送信号,指定输出轴旋转角度。随着科技的发展与开发的需要(航模,微型机器人等),小型的舵机逐渐在市场上出现。舵机一般而言都有最大旋转角度(比如180度。)与普通直流电机的区
一.舵机介绍1.舵机简介舵机(英文叫Servo):它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。最早的舵机是船舶上的一种大甲板机械。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小,通过发送信号,指定输出轴旋转角度。随着科技的发展与开发的需要(航模,微型机器人等),小型的舵机逐渐在市场上出现。舵机一般而言都有最大旋转角度(比如180度。)与普通直流电机的区
一.舵机介绍
1.舵机简介
舵机(英文叫Servo):它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。最早的舵机是船舶上的一种大甲板机械。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小,通过发送信号,指定输出轴旋转角度。随着科技的发展与开发的需要(航模,微型机器人等),小型的舵机逐渐在市场上出现。舵机一般而言都有最大旋转角度(比如180度。)与普通直流电机的区别主要在,直流电机是一圈圈转动的,舵机只能在一定角度内转动,不能一圈圈转(数字舵机可以在舵机模式和电机模式中切换,没有这个问题)。普通直流电机无法反馈转动的角度信息,而舵机可以。用途也不同,普通直流电机一般是整圈转动做动力用,舵机是控制某物体转动一定角度用(比如机器人的关节)。

图1 舵机种类
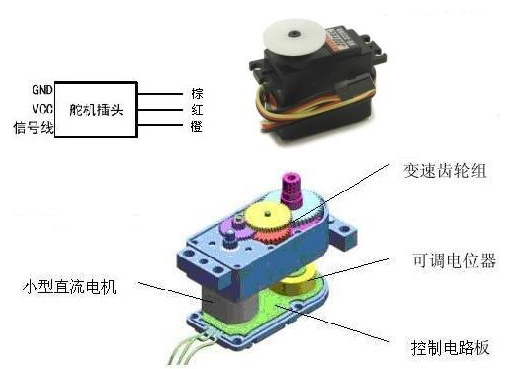
图2 舵机内部结构
2.舵机控制原理
舵机的伺服系统由可变宽度的脉冲来进行控制,也就是我们常说的PWM信号,控制线是用来传送脉冲的。脉冲的参数有最小值,最大值,和频率。一般而言,舵机的基准信号都是周期为20ms,宽度为1.5ms。这个基准信号定义的位置为中间位置。舵机有最大转动角度,中间位置的定义就是从这个位置到最大角度与最小角度的量完全一样。最重要的一点是,不同舵机的最大转动角度可能不相同,但是其中间位置的脉冲宽度是一定的,那就是1.5ms。如下图:
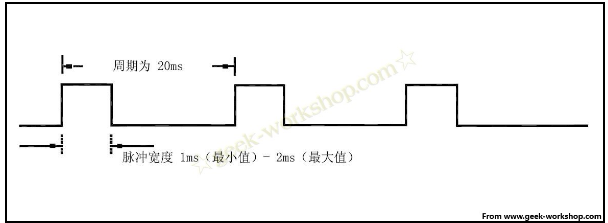
图3 PWM
图4 PWM与舵机转角示意图
角度是由来自控制线的持续的脉冲所产生。这种控制方法叫做脉冲调制。脉冲的长短决定舵机转动多大角度。例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。当控制系统发出指令,让舵机移动到某一位
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7382
7382

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









