






卡尔曼滤波入门学习
本文记录卡尔曼滤波的相关原理和个人心得,有些地方未作详细展开,纯个人技术笔记积累.
首先说一下个人的理解,卡尔曼滤波是干什么的?这个算法的提出原因是什么?
卡尔曼滤波,是用来评估“估计值和测量值哪个更可信”这个问题的。
程序推导出来的值,和实际测量的值,这两个都存在一定误差的情况下,如何获得一个更精确的数据?
卡尔曼滤波,正是用来解决这一问题的,所以在实际工程中,尤其是对精度要求非常高的项目(比如航天的项目,自动驾驶的项目等等),非常常见且适用。
以前一个同事问过:为什么叫卡尔曼滤波,怎么就滤波了呢?
个人理解是:滤波往往是指过滤噪点,或者将某个频率的信息过滤掉。而这个算法处理的是测量工具不准确,含有噪声存在的案例,通过这个算法,使得我们得到了更精确的值,所以叫滤波。然后以提出者(卡尔曼)这个人来命名,所以就叫做“卡尔曼滤波”了。
附赠自动驾驶最全的学习资料和量产经验:链接
问题的引入:
任何一个算法或知识点,肯定是有其适用场景,搞清其目的很重要。
看一个身边的例子:

比如地上有一筐苹果,你想知道一共有多少斤。你会怎么做?找一个秤来称一下。
称一次,你觉得不太准确,又称了10次,做个平均,就把这筐苹果的重量得到了。
这是现实生活中,非常常见的事情,每天都有类似的事情发生。
那么现在有人告诉你,你用的那个秤之前被人摔坏了,不是很准,但你只有这一个秤,你该怎么办?
这就是卡尔曼滤波这个算法的适用场景:测量值存在误差,我们该怎么处理。
想要理解卡尔曼滤波,就一定要区分“估计值和测量值(或者叫预测值和观测值)”, “估计误差与测量误差(或者叫预测误差和观测误差)”这几个概念。
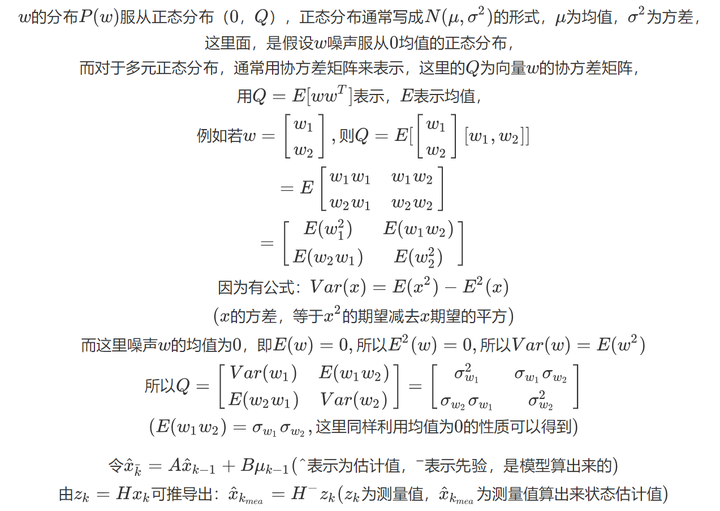
协方差矩阵:
首先,介绍一个前置知识点:协方差矩阵(包含方差,协方差)

方差,代表着数据的波动情况。数据越稳定,方差越小。
在科研和工程中,当我们想要知道某一个真实的值时,我们会用某个工具反复测量,测量值通常会在真实值附近。我们希望测量值的方差越小越好。(方差越小,说明数值越稳定)

比如说上面的这张图片,真实值是图中的黑点(0,0)处,我们用两个工具来测量这个值。
第一个工具的测量结果是红点的分布,第二个工具的测量结果是绿点的分布。
哪个工具更好一点?当然是第一个工具,因为每次测量,红点都在黑点附近,偏离黑点小(数学语言描述是:红点的方差小)。
而卡尔曼滤波的最终优化思想,就是希望误差的方差达到最小。
再说一个数学技巧:用矩阵求协方差矩阵

具体原因见知乎文章:协方差矩阵与相关性分析
测量一个数据:
a. 用多次测试值来估计真实值:取平均数

至此,我们得到了一个很重要公式(我再来写一遍):

我们要明确自己的需求:x表示估计值(这是我们一直想要知道的),z表示测量值。上面的公式,给出了一种本次结果与上次结果的约束关系:中间相差一个系数乘法式子。

之所以要设立这样的数学指标,是因为要:比较估计误差和测量误差。
逻辑就是:哪个误差小,我们就相信哪个。

至此可以总结一下计算步骤:三步
第一步:计算卡尔曼增益(Kalman Gain)

第二步: 计算当前k时刻估计值

第三步:更新此时(k时刻)的估计误差

看一个例子(数据融合):
用两个秤来称一个东西,两个秤都有一定的误差。


最终我们看到,利用的思想是使得方差达到最小(方差越小,代表着数据越稳定,即数据越精确)。
在数学中求极值,就是令导数为0(这是很常见的数学技巧)。
这里面涉及一个问题:为什么是对k求导,令其为0?
原因是:k可以看成一个变量。我们就是想要知道k取何值时,方差能够达到最小,所以才对k求导。
状态空间方程:

这个方程组如何理解呢?
是这样的:

以上两个方程,除了w和v这两个噪声外,其他矩阵变量都是已知的,在实际工程和科研中,会明确给出。(状态之间如何变换以及人为控制,肯定是要明确给出的)
至此,我们得到了两种x值:模型推导出来的先验值,和测量出来的测量值。

利用前面介绍的公式:

将现在得到的两种x值,代入其中,可以得到:

我们看一下这个系数G有什么影响:

而一些教材上,取G=KH, 卡尔曼滤波的公式,就变成了

目标:寻找合适的K, 使得上面公式中得到x最接近于真实值。
(真实值,我们并不知道,最终的优化目标转化成了:使得误差的方差达到最小)
首先定义出误差:

我们最终是要使误差的方差最小,即上面的协方差矩阵P的迹最小.

首先,要记住一些常用的矩阵公式(4个):

拿其中的一个矩阵公式,进行验证:第三个

误差的协方差矩阵P,化简过程为

至此,卡尔曼增益的所有式子就给出来了。
总结:
卡尔曼滤波一共有5个公式,梳理一下思路:

这5个公式可以分为2部分:预测部分+矫正部分

对比一下前面的状态空间方程的内容,加深对上面5个公式的理解:

一定要清楚上面5个公式中每个变量的含义,以及过程噪声的协方差Q和测量噪声的协方差R都用在了哪里。
总的思路:

后续在此基础上又出现了扩展卡尔曼滤波,无迹卡尔曼滤波等。以后再研究吧 。
个人体会:
搞清卡尔曼滤波的引入问题很重要,哪里会用它。
卡尔曼滤波一共有5个公式,理解公式中每个变量的物理含义很重要。
有一些数学技巧在里面:
-
真实值我们并不知道。为了求真实值,转化问题为:使得方差最小。
-
为了求极值(或最值),使得导数为0。
-
将协方差矩阵中的方差最小这一目的,转化为求矩阵的迹trace最小。(这点在图像领域中角点检测里面,也有一样的应用)
-
本算法中时希望方差越小越好,而在某些算法中,是希望方差越大越好。比如PCA算法做主成分分析。
-
前面引出的卡尔曼增益的计算公式(估计误差与测量误差的比较),与非线性优化算法中的Levenberg-Marquardt算法中的Trust Region有点相似。这可能就是一些数学大佬设计公式时,描述事物发展所培养出来的科研直觉。

本文还有一些知识点:
-
扩展卡尔曼滤波,无迹卡尔曼滤波等等
-
卡尔曼滤波与贝叶斯滤波,粒子滤波等区别与联系。
-
相关系数为1,代表着什么?















 605
605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









